Flight Dynamics
Diunggah oleh
steenbeekingDeskripsi Asli:
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Flight Dynamics
Diunggah oleh
steenbeekingHak Cipta:
Format Tersedia
Flight Dynamics Summary
1. Introduction
In this summary we examine the ight dynamics of aircraft. But before we do that, we must examine
some basic ideas necessary to explore the secrets of ight dynamics.
1.1 Basic concepts
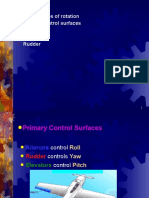
1.1.1 Controlling an airplane
To control an aircraft, control surfaces are generally used. Examples are elevators, aps and spoilers.
When dealing with control surfaces, we can make a distinction between primary and secondary ight
control surfaces. When primary control surfaces fail, the whole aircraft becomes uncontrollable.
(Examples are elevators, ailerons and rudders.) However, when secondary control surfaces fail, the
aircraft is just a bit harder to control. (Examples are aps and trim tabs.)
The whole system that is necessary to control the aircraft is called the control system. When a control
system provides direct feedback to the pilot, it is called a reversible system. (For example, when using
a mechanical control system, the pilot feels forces on his stick.) If there is no direct feedback, then we
have an irreversible system. (An example is a y-by-wire system.)
1.1.2 Making assumptions
In this summary, we want to describe the ight dynamics with equations. This is, however, very dicult.
To simplify it a bit, we have to make some simplifying assumptions. We assume that . . .
There is a at Earth. (The Earths curvature is zero.)
There is a non-rotating Earth. (No Coriolis accelerations and such are present.)
The aircraft has constant mass.
The aircraft is a rigid body.
The aircraft is symmetric.
There are no rotating masses, like turbines. (Gyroscopic eects can be ignored.)
There is constant wind. (So we ignore turbulence and gusts.)
1.2 Reference frames
1.2.1 Reference frame types
To describe the position and behavior of an aircraft, we need a reference frame (RF). There are several
reference frames. Which one is most convenient to use depends on the circumstances. We will examine
a few.
1
First lets examine the inertial reference frame F
I
. It is a right-handed orthogonal system. Its
origin A is the center of the Earth. The Z
I
axis points North. The X
I
axis points towards the
vernal equinox. The Y
I
axis is perpendicular to both the axes. Its direction can be determined
using the right-hand rule.
In the (normal) Earth-xed reference frame F
E
, the origin O is at an arbitrary location on
the ground. The Z
E
axis points towards the ground. (It is perpendicular to it.) The X
E
axis is
directed North. The Y
E
axis can again be determined using the right-hand rule.
The body-xed reference frame F
b
is often used when dealing with aircraft. The origin of the
reference frame is the center of gravity (CG) of the aircraft. The X
b
axis lies in the symmetry
plane of the aircraft and points forward. The Z
b
axis also lies in the symmetry plane, but points
downwards. (It is perpendicular to the X
b
axis.) The Y
b
axis can again be determined using the
right-hand rule.
The stability reference frame F
S
is similar to the body-xed reference frame F
b
. It is rotated
by an angle
a
about the Y
b
axis. To nd this
a
, we must examine the relative wind vector
V
a
. We can project this vector onto the plane of symmetry of the aircraft. This projection is then
the direction of the X
S
axis. (The Z
S
axis still lies in the plane of symmetry. Also, the Y
S
axis is
still equal to the Y
b
axis.) So, the relative wind vector lies in the X
S
Y
S
plane. This reference frame
is particularly useful when analyzing ight dynamics.
The aerodynamic (air-path) reference frame F
a
is similar to the stability reference frame F
S
.
It is rotated by an angle
a
about the Z
S
axis. This is done, such that the X
a
axis points in the
direction of the relative wind vector V
a
. (So the X
a
axis generally does not lie in the symmetry
plane anymore.) The Z
a
axis is still equation to the Z
S
axis. The Y
a
axis can now be found using
the right-hand rule.
Finally, there is the vehicle reference frame F
r
. Contrary to the other systems, this is a left-
handed system. Its origin is a xed point on the aircraft. The X
r
axis points to the rear of the
aircraft. The Y
r
axis points to the left. Finally, the Z
r
axis can be found using the left-hand rule.
(It points upward.) This system is often used by the aircraft manufacturer, to denote the position
of parts within the aircraft.
1.2.2 Changing between reference frames
Weve got a lot of reference frames. It would be convenient if we could switch from one coordinate system
to another. To do this, we need to rotate reference frame 1, until we wind up with reference frame 2. (We
dont consider the translation of reference frames here.) When rotating reference frames, Euler angles
come in handy. The Euler angles
x
,
y
and
z
denote rotations about the X axis, Y axis and Z axis,
respectively.
We can go from one reference frame to any other reference frame, using at most three Euler angles. An
example transformation is
x
y
z
. In this transformation, we rst rotate about the X axis,
followed by a transformation about the Y axis and the Z axis, respectively. The order of these rotations
is very important. Changing the order will give an entirely dierent nal result.
1.2.3 Transformation matrices
An Euler angle can be represented by a transformation matrix T. To see how this works, we consider
a vector x
1
in reference frame 1. The matrix T
21
now calculates the coordinates of the same vector x
2
in reference frame 2, according to x
2
= T
21
x
1
.
2
Lets suppose were only rotating about the X axis. In this case, the transformation matrix T
21
is quite
simple. In fact, it is
T
21
=
_
_
1 0 0
0 cos
x
sin
x
0 sin
x
cos
x
_
_. (1.2.1)
Similarly, we can rotate about the Y axis and the Z axis. In this case, the transformation matrices are,
respectively,
T
21
=
_
_
cos
y
0 sin
y
0 1 0
sin
y
0 cos
y
_
_ and T
21
=
_
_
cos
z
sin
z
0
sin
z
cos
z
0
0 0 1
_
_. (1.2.2)
A sequence of rotations (like
x
y
z
) is now denoted by a sequence of matrix multiplications
T
41
= T
43
T
32
T
21
. In this way, a single transformation matrix for the whole sequence can be obtained.
Transformation matrices have interesting properties. They only rotate points. They dont deform them.
For this reason, the matrix columns are orthogonal. And, because the space is not stretched out either,
these columns must also have length 1. A transformation matrix is thus orthogonal. This implies that
T
1
21
= T
T
21
= T
12
. (1.2.3)
1.2.4 Transformation examples
Now lets consider some actual transformations. Lets start at the body-xed reference frame F
b
. If we
rotate this frame by an angle
a
about the Y axis, we nd the stability reference frame F
S
. If we then
rotate it by an angle
a
about the Z axis, we get the aerodynamic reference frame F
a
. So we can nd
that
x
a
=
_
_
cos
a
sin
a
0
sin
a
cos
a
0
0 0 1
_
_x
S
=
_
_
cos
a
sin
a
0
sin
a
cos
a
0
0 0 1
_
_
_
_
cos
a
0 sin
a
0 1 0
sin
a
0 cos
a
_
_x
b
. (1.2.4)
By working things out, we can thus nd that
T
ab
=
_
_
cos
a
cos
a
sin
a
cos
a
sin
a
sin
a
cos
a
cos
a
sin
a
sin
a
sin
a
0 cos
a
_
_. (1.2.5)
We can make a similar transformation between the Earth-xed reference frame F
E
and the body-xed
reference frame F
b
. To do this, we rst have to rotate over the yaw angle about the Z axis. We then
rotate over the pitch angle about the Y axis. Finally, we rotate over the roll angle about the X
axis. If we work things out, we can nd that
T
bE
=
_
_
cos cos cos sin sin
sinsin cos cos sin sinsin sin + cos cos sincos
cos sin cos + sinsin cos sin sin sincos cos cos
_
_. (1.2.6)
Now thats one hell of a matrix . . .
3
1.2.5 Moving reference frames
Lets examine some point P. This point is described by vector r
E
in reference frame F
E
and by r
b
in
reference frame F
b
. Also, the origin of F
b
(with respect to F
E
) is described by the vector r
Eb
. So we
have r
E
= r
Eb
+r
b
.
Now lets examine the time derivative of r
E
in F
E
. We denote this by
dr
E
dt
E
. It is given by
dr
E
dt
E
=
dr
Eb
dt
E
+
dr
b
dt
E
. (1.2.7)
Lets examine the terms in this equation. The middle term of the above equation simply indicates the
movement of F
b
, with respect to F
E
. The right term is, however, a bit more complicated. It indicates
the change of r
b
with respect to F
E
. But we usually dont know this. We only know the change of r
b
in F
b
. So we need to transform this term from F
E
to F
b
. Using a slightly dicult derivation, it can be
shown that
dr
b
dt
E
=
dr
b
dt
b
+
bE
r
b
. (1.2.8)
The vector
bE
denotes the rotation vector of F
b
with respect to F
E
. Inserting this relation into the
earlier equation gives us
dr
E
dt
E
=
dr
Eb
dt
E
+
dr
b
dt
b
+
bE
r
b
. (1.2.9)
This is quite an important relation, so remember it well. By the way, it holds for every vector. So instead
of the position vector r, we could also take the velocity vector V.
Finally, we note some interesting properties of the rotation vector. Given reference frames 1, 2 and 3, we
have
12
=
21
and
31
=
32
+
21
. (1.2.10)
4
2. Deriving the equations of motion
The ight dynamics of an aircraft are described by its equations of motion (EOM). We are going to
derive those equations in this chapter.
2.1 Forces
2.1.1 The basic force equation
To derive the equations of motion of an aircraft, we start by examining forces. Our starting point in
this is Newtons second law. However, Newtons second law only holds in an inertial reference system.
Luckily, the assumptions we have made earlier imply that the Earth-xed reference frame F
E
is inertial.
(However, F
b
is not an inertial reference frame.) So we will derive the equations of motion with respect
to F
E
.
Lets examine an aircraft. Newtons second law states that
F =
_
dF =
d
dt
__
V
p
dm
_
, (2.1.1)
where we integrate over the entire body. It can be shown that the right part of this equation equals
d
dt
(V
G
m), where V
G
is the velocity of the center of gravity of the aircraft. If the aircraft has a constant
mass, we can rewrite the above equation into
F = m
dV
G
dt
= mA
G
. (2.1.2)
This relation looks very familiar. But it does imply something very important. The acceleration of the
CG of the aircraft does not depend on how the forces are distributed along the aircraft. It only depends
on the magnitude and direction of the forces.
2.1.2 Converting the force equation
There is one slight problem. The above equation holds for the F
E
reference frame. But we usually work
in the F
b
reference frame. So we need to convert it. To do this, we can use the relation
A
G
=
dV
G
dt
E
=
dV
G
dt
b
+
bE
V
G
. (2.1.3)
Inserting this into the above equation will give
F = m
dV
G
dt
b
+m
bE
V
G
= m
_
_
u +qw rv
v +ru pw
w +pv qu
_
_. (2.1.4)
By the way, in the above equation, we have used that
V
G
=
_
_
u
v
w
_
_ and
bE
=
_
_
p
q
r
_
_. (2.1.5)
Here, u, v and w denote the velocity components in X, Y and Z direction, respectively. Similarly, p, q
and r denote rotation components about the X, Y and Z axis, respectively.
5
2.1.3 External forces
Lets take a look at the forces F our aircraft is subject to. There are two important kinds of forces:
gravity and aerodynamic forces. The gravitational force F
gravity
is, in fact, quite simple. It is given by
F
E
gravity
=
_
0 0 mg
_
T
, (2.1.6)
where g is the gravitational acceleration. The superscript E indicates that the force is given in
the F
E
reference frame. However, we want the force in the F
b
reference frame. Luckily, we know the
transformation matrix T
bE
. We can thus nd that
F
b
gravity
= T
bE
F
E
gravity
= mg
_
_
sin
sincos
cos cos
_
_. (2.1.7)
The aerodynamic forces F
aero
are, however, a lot more dicult. For now, we wont examine them in
depth. Instead, we simply say that
F
b
aero
=
_
X
b
Y
b
Z
b
_
T
. (2.1.8)
By combining this knowledge with the equation of motion for forces, we nd that
m
_
_
u +qw rv
v +ru pw
w +pv qu
_
_ = mg
_
_
sin
sincos
cos cos
_
_ +
_
_
X
b
Y
b
Z
b
_
_. (2.1.9)
2.2 Moments
2.2.1 Angular momentum
Before were going to look at moments, we will rst examine angular momentum. The angular mo-
mentum of an aircraft B
G
(with respect to the CG) is dened as
B
G
=
_
dB
G
= r V
P
dm, (2.2.1)
where we integrate over every point P in the aircraft. We can substitute
V
P
= V
G
+
dr
dt
b
+
bE
r. (2.2.2)
If we insert this, and do a lot of working out, we can eventually nd that
B
G
= I
G
bE
. (2.2.3)
The parameter I
G
is the inertia tensor, with respect to the CG. It is dened as
I
G
=
_
_
I
x
J
xy
J
xz
J
xy
I
y
J
yz
J
xz
J
yz
I
z
_
_ =
_
_
_
(r
2
y
+r
2
z
)dm
_
(r
x
r
y
)dm
_
(r
x
r
z
)dm
_
(r
x
r
y
)dm
_
(r
2
x
+r
2
z
)dm
_
(r
y
r
z
)dm
_
(r
x
r
z
)dm
_
(r
y
r
z
)dm
_
(r
2
x
+r
2
y
)dm
_
_. (2.2.4)
We have assumed that the XZ-plane of the aircraft is a plane of symmetry. For this reason, J
xy
= J
yz
= 0.
This simplies the inertia tensor a bit.
6
2.2.2 The moment equation
It is now time to look at moments. We again do this from the inertial reference frame F
E
. The moment
acting on our aircraft, with respect to its CG, is given by
M
G
=
_
dM
G
=
_
r dF =
_
r
d (V
p
dm)
dt
, (2.2.5)
where we integrate over the entire body. Luckily, we can simplify the above relation to
M
G
=
dB
G
dt
E
. (2.2.6)
The above relation only holds for inertial reference frames, such as F
E
. However, we want to have the
above relation in F
b
. So we rewrite it to
M
G
=
dB
G
dt
b
+
bE
B
G
. (2.2.7)
By using B
G
= I
G
bE
, we can continue to rewrite the above equation. We eventually wind up with
M
G
= I
G
d
bE
dt
b
+
bE
I
G
bE
. (2.2.8)
In matrix-form, this equation can be written as
M
G
=
_
_
I
x
p + (I
z
I
y
)qr J
xz
(pq + r)
I
y
q + (I
x
I
z
)pr +J
xz
(p
2
r
2
)
I
z
r + (I
y
I
x
)pq +J
xz
(qr p)
_
_. (2.2.9)
Note that we have used the fact that J
xy
= J
yz
= 0.
2.2.3 External moments
Lets take a closer look at M
G
. Again, we can distinguish two types of moments, acting on our aircraft.
There are moments caused by gravity, and moments caused by aerodynamic forces. Luckily, the moments
caused by gravity are zero. (The resultant gravitational force acts in the CG.) So we only need to consider
the moments caused by aerodynamic forces. We denote those as
M
b
G,aero
=
_
L M N
_
T
. (2.2.10)
This turns the moment equation into
_
_
I
x
p + (I
z
I
y
)qr J
xz
(pq + r)
I
y
q + (I
x
I
z
)pr +J
xz
(p
2
r
2
)
I
z
r + (I
y
I
x
)pq +J
xz
(qr p)
_
_ =
_
_
L
M
N
_
_. (2.2.11)
2.3 Kinematic relations
2.3.1 Translational kinematics
Now that we have the force and moment equations, we only need to nd the kinematic relations for our
aircraft. First, we examine translational kinematics. This concerns the velocity of the CG of the aircraft
with respect to the ground.
7
The velocity of the CG, with respect to the ground, is called the kinematic velocity V
k
. In the F
E
reference system, it is described by
V
k
=
_
V
N
V
E
V
Z
_
T
. (2.3.1)
In this equation, V
N
is the velocity component in the Northward direction, V
E
is the velocity component
in the eastward direction, and V
Z
is the vertical velocity component. (The minus sign is present because,
in the Earth-xed reference system, V
Z
is dened to be positive downward.)
However, in the F
b
reference system, the velocity of the CG, with respect to the ground, is given by
V
G
=
_
u v w
_
T
. (2.3.2)
To relate those two vectors to each other, we need a transformation matrix. This gives us
V
k
= T
Eb
V
G
= T
T
bE
V
G
. (2.3.3)
This is the translational kinematic relation. We can use it to derive the change of the aircraft position.
To do that, we simply have to integrate the velocities. We thus have
x(t) =
_
t
0
V
N
dt, y(t) =
_
t
0
V
E
dt and h(t) =
_
t
0
V
Z
dt. (2.3.4)
2.3.2 Rotational kinematics
Now lets examine rotational kinematics. This concerns the rotation of the aircraft. In the F
E
reference
system, the rotational velocity is described by the variables ,
and
. However, in the F
b
reference
system, the rotational velocity is described by p, q and r. The relation between these two triples can be
shown to be
_
_
p
q
r
_
_ =
_
_
1 0 sin
0 cos cos sin
0 sin cos cos
_
_
_
_. (2.3.5)
This is the rotational kinematic relation. It is interesting to note that, if = = = 0, then p = ,
q =
and r =
. By the way, we can also invert the above relation. We would then get
_
_ =
_
_
1 sintan cos tan
0 cos sin
0 sin/ cos cos / cos
_
_
_
_
p
q
r
_
_. (2.3.6)
8
3. Rewriting the equations of motion
The equations of motion are quite dicult to deal with. To get some useful data out of them, we need
to make them a bit simpler. For that, we rst linearize them. We then simplify them. And after that,
we set them in a non-dimensional form.
3.1 Linearization
3.1.1 The idea behind linearization
Lets suppose we have some non-linear function f(X). Here, X is the state of the system. It contains
several state variables. To linearize f(X), we should use a multi-dimensional Taylor expansion. We
then get
f(X) f(X
0
) +f
X1
(X
0
)X
1
+f
X2
(X
0
)X
2
+. . . . . . +f
Xn
(X
0
)X
n
+ higher order terms. (3.1.1)
Here, X
0
is the initial point about which we linearize the system. The linearization will only be valid
close to this point. Also, the term X
i
indicates the deviation of variable X
i
from the initial point X
0
.
When applying linearization, we always neglect higher order terms. This signicantly simplies the
equation. (Although its still quite big.)
3.1.2 Linearizing the states
Now lets apply linearization to the force and moment equations. We start at the right side: the states.
We know from the previous chapter that
F
x
= m( u +qw rv), (3.1.2)
F
y
= m( v +ru pw), (3.1.3)
F
z
= m( w +pv qu). (3.1.4)
So we see that F
x
= f( u, q, w, r, v). The state vector now consists of ve states. By applying linearization,
we nd that
F
x
= m( u
0
+q
0
w
0
r
0
v
0
) +m( u +q
0
w +w
0
q r
0
v v
0
r), (3.1.5)
F
y
= m( v
0
+r
0
u
0
p
0
w
0
) +m( v +r
0
u +u
0
r p
0
w w
0
p), (3.1.6)
F
z
= m( w
0
+p
0
v
0
q
0
u
0
) +m( w +p
0
v +v
0
p q
0
u u
0
q). (3.1.7)
We can apply a similar trick for the moments. This would, however, give us quite big expressions. And
since we dont want to spoil too much paper (safe the rainforests!), we will not derive those here. Instead,
we will only examine the nal result in the end.
3.1.3 Linearizing the forces
Now lets try to linearize the forces. Again, we know from the previous chapter that
F
x
= W sin +X, (3.1.8)
F
y
= W sin cos +Y, (3.1.9)
F
z
= W cos cos +Z, (3.1.10)
9
where the weight W = mg. We see that this time F
x
= f(, X). Also, F
y
= f(, , Y ) and F
Z
=
f(, , Z). It may seem that linearization is easy this time. However, there are some problems.
The problems are the forces X, Y and Z. They are not part of the state of the aircraft. Instead they
also depend on the state of the aircraft. And they dont only depend on the current state, but on the
entire history of states! (For example, a change in angle of attack could create disturbances at the wing.
These disturbances will later result in forces acting on the tail of the aircraft.)
How do we put this into equations? Well, we say that X is not only a function of the velocity u, but
also of all its derivatives u, u, . . .. And the same goes for v, w, p, q and r. This gives us an innitely
big equation. (Great. . . .) But luckily, experience has shown that we can neglect most of these time
derivatives, as they arent very important. There are only four exceptions. v strongly inuences the
variables Y and N. Also, w strongly inuences Z and M. We therefore say that
F
x
= f(, X) with X = f(u, v, w, p, q, r,
a
,
e
,
r
,
t
), (3.1.11)
F
y
= f(, , Y ) with Y = f(u, v, w, v, p, q, r,
a
,
e
,
r
), (3.1.12)
F
z
= f(, , Z) with Z = f(u, v, w, w, p, q, r,
a
,
e
,
r
,
t
). (3.1.13)
When creating the Taylor expansion, we have to apply the chain rule. We then nd that
F
x
(X) F
x
(X
0
) W cos
0
+X
u
u +X
v
v +X
w
w +X
p
p +. . . +X
t
t
, (3.1.14)
F
y
(X) F
y
(X
0
) W sin
0
sin
0
+W cos
0
cos
0
+Y
v
v +. . . +Y
r
r
, (3.1.15)
F
z
(X) F
z
(X
0
) W cos
0
sin
0
W sin
0
cos
0
+Z
w
w +. . . +Z
t
t
. (3.1.16)
Now thats one big Taylor expansion. And we havent even written down all terms of the equation.
(Note the dots in the equation.) By the way, the term X
u
indicates the derivative X/u. Similarly,
X
v
= X/v, and so on.
You may wonder what
a
,
e
,
r
and
t
are. Those are the settings of the aileron, elevator, rudder
and thrust. These settings of course inuence the forces acting on the aircraft. We will examine those
coecients later in more detail. (You may also wonder, why doesnt Y depend on the thrust setting
t
?
This is because we assume that the direction of the thrust vector lies in the plane of symmetry.)
3.2 Simplication
3.2.1 Symmetry and asymmetry
Lets try to simplify that monstrocity of an equation of the previous part. To do that, we have to apply
several tricks. The most important one, is that of symmetry and asymmetry.
We can make a distinction between symmetric and asymmetric forces/deviations. The symmetric devia-
tions (the deviations which dont break the symmetry) are u, w and q. The symmetric forces/moments
are X, Z and M. Similarly, the asymmetric deviations are v, p and r. The asymmetric forces/moments
are Y , L and N.
It can now be shown that there is no coupling between the symmetric and the asymmetric properties.
(That is, as long as the deviations are small.) In other words, X is uneected by v, p and r. Thus
X
v
= X
p
= X
r
= 0. The same trick works for the other forces and moments as well. This causes a lot
of terms to disappear in the force equations.
10
3.2.2 Simplifying the force equations
There is also another important trick we use, when simplifying the force equations. We assume that the
aircraft is ying in a steady symmetric ight. This means that
u
0
= 0 u
0
= 0 p
0
= 0 p
0
= 0
0
= 0
0
= 0 X
0
= 0
X
0
= 0,
v
0
= 0 v
0
= 0 q
0
= 0 q
0
= 0
0
= 0
0
= 0 Y
0
= 0
Y
0
= 0,
w
0
= 0 w
0
= 0 r
0
= 0 r
0
= 0
0
= 0
0
= 0 Z
0
= 0
Z
0
= 0.
(3.2.1)
This greatly simplies the F
x
(X
0
), F
y
(X
0
) and F
z
(X
0
) terms.
Now it is nally time to apply all these simplications and tricks. It will give us the force equations for
small deviations from a steady symmetric ight. These equations are
W cos
0
+X
u
u +X
w
w +X
q
q +X
e
e
+X
t
t
= m( u +w
0
q), (3.2.2)
W cos
0
+Y
v
v +Y
v
v +Y
p
p +Y
r
r +Y
a
a
+Y
r
r
= m( v +u
0
r w
0
p), (3.2.3)
W sin
0
+Z
u
u +Z
w
w +Z
w
w +Z
q
q +Z
e
e
+Z
t
t
= m( w u
0
q). (3.2.4)
Of these three equations, the rst and the third correspond to symmetric motion. The second equation
corresponds to asymmetric motion.
You may wonder, where did all the s go to? Well, to simplify our notation, we omitted them. So in
the above equation, all variables indicate the displacement from the initial position X
0
.
Finally, there is one more small simplication we could do. We havent fully dened our reference system
yet. (We havent specied where the X axis is in the symmetry plane.) Now lets choose our reference
system. The most convenient choice is in this case the stability reference frame F
S
. By choosing this
frame, we have u
0
= V and w
0
= 0. (V is the velocity.) This eliminates one more term.
3.2.3 The moment equations
In a similar way, we can linearize and simplify the moment equations. We wont go through that tedious
process. By now you should more or less know how linearization is done. Well just mention the results.
They are
L
v
v +L
p
p +L
r
r +L
a
a
+L
r
r
= I
x
p J
xz
r, (3.2.5)
M
u
u +M
w
w +M
w
w +M
q
q +M
e
e
+M
t
t
= I
y
q, (3.2.6)
N
v
v +N
v
v +N
p
p +N
r
r +N
a
a
+N
r
r
= I
z
r J
xz
p. (3.2.7)
Of these three equations, only the second one corresponds to symmetric motion. The other two correspond
to asymmetric motion.
3.2.4 The kinematic relations
The kinematic relations can also be linearized. (This is, in fact, not that dicult.) After we apply the
simplications, we wind up with
= p +r tan
0
, (3.2.8)
= q, (3.2.9)
=
r
cos
0
. (3.2.10)
Of these three equations, only the second one corresponds to symmetric motion. The other two correspond
to asymmetric motion.
11
3.3 Setting the equations in a non-dimensional form
3.3.1 The dividing term
Aerospace engineers often like to work with non-dimensional coecients. By doing this, they can easily
compare aircraft of dierent size and weight. So, we will also try to make our equations non-dimensional.
But how do we do that? We simply divide the equations by a certain value, making them non-dimensional.
The question remains, by what do we divide them? Well, we divide the force equations by
1
2
V
2
S, the
symmetric moment equation by
1
2
V
2
S c, the asymmetric moment equations by
1
2
V
2
Sb, the symmetric
kinematic equation by V/ c and the asymmetric kinematic equations by V/b. Here, S is the wing surface
area, c is the mean chord length, and b is the wing span. (Note that we use c for symmetric equations,
while we use b for asymmetric equations.)
3.3.2 Dening coecients
Dividing our equations by a big term wont make them look prettier. To make them still readable, we
need to dene some coecients. To see how we do that, we consider the term X
u
u. We have divided this
term by
1
2
V
2
S. We can now rewrite this term to
X
u
u
1
2
V
2
S
=
X
u
1
2
V S
u
V
= C
Xu
u. (3.3.1)
In this equation, we have dened the non-dimensional velocity u. There is also the coecient C
Xu
=
X
u
/(
1
2
V S). This coecient is called a stability derivative.
We can apply the same trick to other terms as well. For example, we can rewrite the term X
w
w to
X
w
w
1
2
V
2
S
=
X
w
1
2
V S
w
V
= C
X
, (3.3.2)
where the angle of attack is approximated by = w/V . We can also rewrite the term X
q
q to
X
q
q
1
2
V
2
S
=
X
q
1
2
V
2
S c
c
V
d
dt
= C
Xq
D
c
. (3.3.3)
This time we dont only see a new coecient. There is also the dierential operator D
c
. Another
dierential operator is D
b
. D
c
and D
b
are dened as
D
c
=
c
V
d
dt
and D
b
=
b
V
d
dt
. (3.3.4)
In this way, a lot of coecients can be dened. We wont state the denitions of all the coecients here.
(There are simply too many for a summary.) But you probably can guess the meaning of most of them
by now. And you simply have to look up the others.
3.3.3 The equations of motion in matrix form
So, we could now write down a new set of equations, with a lot of coecients. However, we know that
these equations are linear. So, we can put them in a matrix form. If we do that, we will nd two
interesting matrix equations. The equations for the symmetric motion are given by
_
_
C
Xu
2
c
D
c
C
X
C
Z0
C
Xq
C
Zu
C
Z
+ (C
Z
2
c
)D
c
C
X0
2
c
+C
Zq
0 0 D
c
1
C
mu
C
m
+C
m
D
c
0 C
mq
2
c
K
2
Y
D
c
_
_
_
_
u
q c
V
_
_
=
_
_
C
X
e
C
X
t
C
Z
e
C
Z
t
0 0
C
m
e
C
m
t
_
_
_
t
_
.
(3.3.5)
12
You may note that, instead of using the subscript M, we use the subscript m. This is just a writing
convention. You also havent seen the variable K
2
Y
yet. It is dened as K
2
Y
=
Iy
m c
2
. Also,
c
=
m
S c
.
The equations for the asymmetric motion are given by
_
_
C
Y
+ (C
Y
2
b
)D
b
C
L
C
Yp
C
Yr
4
b
0
1
2
D
b
1 0
C
l
0 C
lp
4
b
K
2
X
D
b
C
lr
+ 4
b
K
XZ
D
b
C
n
+C
n
D
b
0 C
np
+ 4
b
K
XZ
D
b
C
nr
4
b
K
2
Z
D
b
_
_
_
pb
2V
rb
2V
_
_
=
_
_
C
Y
a
C
Y
r
0 0
C
l
a
C
l
r
C
n
a
C
n
r
_
_
_
r
_
.
(3.3.6)
Again, note that, instead of using the subscripts L and N, we have used l and n. Also, the slip angle
is dened as = v/V .
3.3.4 Equations of motion in state-space form
We can also put our equation in state-space form, being
x = Ax +Bu and y = Cx +Du. (3.3.7)
Here, A is the state matrix, B is the input matrix, C is the output matrix and D is the direct
matrix. Since the system is time-invariant, all these matrices are constant. Also, x is the state vector,
u is the input vector and y is the output vector.
The state-space form has several advantages. First of all, the parameters can be solved for at every
time t. (The complicated equations for this are known.) Second, computers are very good at performing
simulations, once a situation has been described in state-space form.
After some interesting matrix manipulation, the state-space form of the symmetric motions can be derived.
The result is
_
q c
V
_
_
=
_
_
x
u
x
0
z
u
z
z
q
0 0 0
V
c
m
u
m
m
q
_
_
_
_
u
q c
V
_
_
+
_
_
x
e
x
t
z
e
z
t
0 0
m
e
m
t
_
_
_
t
_
. (3.3.8)
There are quite some strange new coecients in this equation. The equations, with which these coecients
are calculated, can be looked up. However, we will not mention those here.
You may notice that, in the above equation, we only have the state matrix A and the input matrix B.
The matrices C and D are not present. That is because they depend on what output you want to get
out of your system. So we cant generally give them here. They are often quite trivial though.
Similarly, the state-space form of the asymmetric motions can be found. This time we have
_
pb
2V
rb
2V
_
_
=
_
_
y
y
p
y
r
0 0
2V
b
0
l
0 l
p
l
r
n
0 n
p
n
r
_
_
_
pb
2V
rb
2V
_
_
+
_
_
0 y
r
0 0
l
a
l
r
n
a
n
r
_
_
_
r
_
. (3.3.9)
And that concludes this collection of oversized equations.
13
4. The aerodynamic center
In this chapter, were going to focus on the aerodynamic center, and its eect on the moment coecient
C
m
.
4.1 Force and moment coecients
4.1.1 Aerodynamic forces
Lets investigate a wing. This wing is subject to a pressure distribution. We can sum up this entire
pressure distribution. This gives us a resultant aerodynamic force vector C
R
.
Figure 4.1: The forces and moments acting on a wing.
Lets split up the aerodynamic force vector C
R
. We can do this in multiple ways. We can split the force
up into a (dimensionless) normal force coecient C
N
and a tangential force coecient C
T
. We
can also split it up into a lift force coecient C
L
and a drag force coecient C
D
. Both methods
are displayed in gure 4.1. The relation between the four force coecients is given by
C
N
= C
L
cos +C
D
sin, (4.1.1)
C
T
= C
D
cos C
L
sin. (4.1.2)
The coecients C
L
, C
N
, C
T
and C
D
all vary with the angle of attack . So if the angle of attack changes,
so do those coecients.
4.1.2 The aerodynamic moment
Next to the aerodynamic forces, we also have an aerodynamic moment coecient C
m
. This moment
depends on the reference position. Lets suppose we know the moment coecient C
m
(x
1
,z
1
)
about some
point (x
1
, z
1
). The moment coecient C
m
(x
2
,z
2
)
about some other point (x
2
, z
2
) can now be found using
C
m
(x
2
,z
2
)
= C
m
(x
1
,z
1
)
+C
N
x
2
x
1
c
C
T
z
2
z
1
c
. (4.1.3)
Here, c is the mean aerodynamic chord length. (The mean aerodynamic chord (MAC) can be
seen as the average chord of the entire 3D wing.) Also, x and z denote the position of the reference
point in the vehicle reference frame F
r
. We dene (x
0
, z
0
) to be the position of the leading edge of the
MAC.
14
4.2 Important points of the wing
4.2.1 The center of pressure
Lets put our reference point (x, z) (for calculating C
m
) on the chord. (We thus set z = z
0
.) There now
is a certain value of x, for which C
m
= 0. This point is called the center of pressure (CP). We denote
its coordinates by (x
d
, z
0
). (The CP is the point where the line of action of C
R
crosses the chord.)
Lets suppose that we know the moment coecient C
m
(x
0
,z
0
)
about the leading edge. We can then nd
x
d
using
C
m
(x
d
,z
0
)
= 0 = C
m
(x
0
,z
0
)
+C
N
x
d
x
0
c
. (4.2.1)
Lets dene e = x
d
x
0
. We can then nd that
e
c
=
C
m
(x
0
,z
0
)
C
N
. (4.2.2)
4.2.2 Lines and metacenters
Lets examine a wing at a certain angle of attack . This wing is subjected to a resultant force C
R
. For
all points on the line of action of C
R
, we have C
m
= 0.
Now lets examine all points for which dC
m
/d = 0. These points also lie on one line. This line is called
the neutral line. The point where this line crosses the MAC (and thus z = z
0
) is called the neutral
point. The crossing point of the neutral line and the line of action of C
R
is called the rst metacenter
M
1
. This point has both C
m
= 0 and dC
m
/d = 0.
Lets take another look at the neutral line. On this line is a point for which d
2
C
m
/d
2
= 0. This point
is called the second metacenter.
It is important to remember that all the lines and points discussed above change as changes. However,
the second metacenter changes only very little. We therefore assume that its position is constant for
dierent angles of attack .
4.2.3 The aerodynamic center
Previously, we have dened the second metacenter. However, in aerodynamics, we usually refer to this
point as the aerodynamic center (AC). Its coordinates are denoted by (x
ac
, z
ac
). The corresponding
moment coecient is written as C
mac
. We know that we have dC
mac
/d = 0 and d
2
C
mac
/d
2
= 0. We
can use this to nd x
ac
and z
ac
.
To nd x
ac
and z
ac
, we have to dierentiate equation (4.1.3) with respect to . Dierentiating it once
gives
dC
mac
d
= 0 =
dC
m
(x
0
,z
0
)
d
+
dC
N
d
x
ac
x
0
c
dC
T
d
z
ac
z
0
c
. (4.2.3)
(Note that we have used the fact that the position of the AC doesnt vary with .) Dierentiating it
twice gives
d
2
C
mac
d
2
= 0 =
d
2
C
m
(x
0
,z
0
)
d
2
+
d
2
C
N
d
2
x
ac
x
0
c
d
2
C
T
d
2
z
ac
z
0
c
. (4.2.4)
We now have two equations and two unknowns. We can thus solve for x
ac
and z
ac
. After this, it is easy
to nd the corresponding moment coecient C
mac
. And since dC
mac
/d = 0, we know that this moment
coecient stays the same, even if varies.
We have just described an analytical method to nd the AC. There are also graphical methods to nd
the AC. We wont go into detail on those methods though.
15
4.2.4 Simplications
We can make a couple of simplications. Usually, dC
T
/d is rather small compared to dC
N
/d. We
therefore often neglect the eects of the tangential force coecient C
T
. If we do this, we nd that the
AC lies on the MAC (z
ac
= z
0
). In fact, the AC coincides with the neutral point.
Finding the position of the AC has now become a lot easier. We know that z
ac
= z
0
. We can use this to
show that x
ac
satises
x
ac
x
0
c
=
dC
m
(x
0
,z
0
)
dC
N
. (4.2.5)
Once x
ac
has been determined, we can nd the moment coecient about any other point on the wing.
Based on our simplications, we have
C
m
(x) = C
mac
+C
N
x x
ac
c
. (4.2.6)
We can also see another interesting fact from this equation. If C
N
= 0, the moment coecient is constant
along the wing. And the value of this moment coecient is equal to C
mac
. In other words, the value of
C
mac
is the value of C
m
when C
N
= 0. (This rule holds for every reference point.)
4.3 Static stability
4.3.1 Stability types
Lets suppose that the aircraft is performing a steady ight. The aircraft is then in equilibrium. This
means that the moment coecient about the center of gravity (CG) must be 0. (C
mcg
= 0.) Now lets
suppose that the aircraft gets a small deviation from this steady ight. For example, increases to
+d. What happens?
Due to the change in angle of attack, C
mcg
is no longer zero. Instead, it will get a value of dC
mcg
. We
can now distinguish three cases.
The change in moment dC
mcg
is in the same direction as d. We thus have dC
mcg
/d > 0. In this
case, the moment causes to diverge away from the equilibrium position. The aircraft is therefore
unstable.
The change in moment dC
mcg
is directed oppositely to d. We now have dC
mcg
/d < 0. In this
case, the moment causes to get back to its equilibrium position. The aircraft is thus stable.
The change in moment dC
mcg
= 0, and thus also dC
mcg
/d = 0. In this case, we are in a new
equilibrium position. This situation is called neutrally stable or indierent.
4.3.2 The position of the center of gravity
We just saw that, to have a stable aircraft, we should have dC
mcg
/d < 0. It turns out that the position
of the CG is very important for this. To see why, we dierentiate equation (4.2.6) with respect to . We
nd that
dC
mcg
d
=
dC
N
d
x
cg
x
ac
c
. (4.3.1)
In general, dC
N
/d > 0. So, to have a stable aircraft, we must have x
cg
x
ac
< 0. The aerodynamic
center should thus be more to the rear of the aircraft than the CG. (This is also why airplanes have a
stabilizing horizontal tailplane: It moves the aerodynamic center to the rear.)
16
4.4 Three-dimensional wings
4.4.1 Basic and additional lift distributions
Previously, we have only examined 2D wings. We will now examine a 3D wing. The wing has a wing
span b. Also, at every point y, the 2D airfoil has its own chord c(y) and lift coecient c
l
(y, ). It also has
a contribution to the lift. By summing up all these lift contributions, we can nd the total lift coecient
C
L
of the wing. This goes according to
C
L
1
2
V
2
S = 2
_
b/2
0
c
l
(y)
1
2
V
2
c(y) dy C
L
= 2
_
b/2
0
c
l
(y)
c(y)
c
dy. (4.4.1)
Note that we have used that S = b c. We also have used the assumption that the wing is symmetric, by
integrating over only one half of the wing.
We can split the lift coecient distribution c
l
(y, ) up into two parts. First, there is the basic lift
distribution c
l
b
(y). This is the lift distribution corresponding to the zero-lift angle of attack
C
L
=0
.
(So c
l
b
(y) = c
l
(y,
C
L
=0
).) Per denition, we thus have
2
_
b/2
0
c
l
b
(y)
c(y)
c
dy = 0. (4.4.2)
Second, there is the additional lift distribution c
la
(y, ). This lift distribution takes into account
changes in . It is dened as c
la
(y, ) = c
l
(y, )c
l
b
(y). So, if we have =
C
L
=0
, then c
la
(y,
C
L
=0
) = 0
for all y.
4.4.2 The aerodynamic center of a 3D wing
You may wonder, what is the use of splitting up the lift distribution? Well, it can be shown that the
position of the aerodynamic center of the entire wing x
ac
only depends on c
la
. In fact, we have
x
ac
x
0
c
=
1
C
L
2
S c
_
b/2
0
c
la
(y, ) c(y) (x
ac
(y) x
0
) dy. (4.4.3)
It is important to note the dierence between all the xs. x
ac
is the position of the AC of the 2D airfoil.
x
ac
is the position of the AC of the entire 3D wing. Finally, x
0
is the position of the leading edge of the
MAC. By the way, the above equation only holds for reasonable taper and wing twist angles. For very
tapered/twisted wings, the above equation loses its accuracy.
Now lets examine the moment coecient of the entire wing. This moment coecient only depends on
the moment coecients c
mac
and the basic lift distribution c
l
b
of the individual airfoils. In fact, it can
be shown that
C
mac
=
2
S c
_
_
b/2
0
c
mac
(y) c(y)
2
dy
_
b/2
0
c
l
b
(y) c(y) (x
ac
(y) x
0
) dy
_
. (4.4.4)
4.4.3 Eects of the 3D wing shape
Lets investigate how the wing shape eects x
ac
and C
mac
. There are several properties that we can give
to our 3D wing.
A cambered airfoil. Camber causes the value c
mac
of the individual airfoils to become more
negative. So C
mac
also becomes more negative. x
ac
doesnt really change.
17
A swept wing. When dealing with swept wings, the term (x
ac
(y) x
0
) becomes important. Wings
with high sweep angles tend to have a shifting AC at high angles of attack. Whether this
improves the stability or not depends on other parameters as well.
A tapered wing. The taper ratio = c
t
/c
r
(the ratio of the tip chord and the root chord) slightly
inuences stability. For swept back wings, a low taper ratio tends to have a stabilizing inuence.
A slender wing. The aspect ratio A has only little inuence on the position of the AC. However,
a slender wing (high A) with a large sweep angle will become unstable at large angles of attack.
A twisted wing. Applying a wing twist angle causes the basic lift distribution c
l
b
to change.
This causes C
mac
to change as well. In what way C
mac
changes, depends on the direction of the
wing twist.
Predicting the exact behaviour of the wing is, however, rather dicult. A lot of parameters inuence the
wing behaviour. So dont be surprised if the above rules dont always hold.
18
5. Examining an entire aircraft
In the previous chapter, weve only considered the wing of an aircraft. Now were going to add the rest
of the aircraft too. How do the various components of the aircraft inuence each other?
5.1 Adding a fuselage
5.1.1 Changes in moment coecient
Previously, we have only considered a wing. This wing had a moment coecient C
mw
. Now lets add a
fuselage. The combination of wing and fuselage has a moment coecient C
m
wf
. The change in moment
coecient C
m
is now dened such that
C
m
wf
= C
mw
+ C
m
. (5.1.1)
Lets take a closer look at this change C
m
. What does it consist of? We know that a fuselage in a ow
usually has a moment coecient C
m
f
. However, the wing causes the ow around the fuselage to change.
This also causes a moment coecient induced on the fuselage, denoted by C
m
fi
. Finally, the fuselage
eects the ow around the wing. There is thus also a factor C
mwi
. We thus have
C
m
= C
m
f
+ C
m
fi
+ C
mwi
. (5.1.2)
In this equation, the coecients C
m
f
and C
m
fi
are usually considered together as C
m
fi
.
5.1.2 Eects of the fuselage
We can use inviscid incompressible ow theory to examine the fuselage. We then nd that the moment
coecient of the fuselage, in the induced velocity eld, is
C
m
fi
= C
m
f
+ C
m
fi
=
2S c
_
l
f
0
b
f
(x)
2
f
(x) dx. (5.1.3)
Here, b
f
(x) is the fuselage width and
f
(x) is the (eective) fuselage angle of attack. We also
integrate over the entire length l
f
of the fuselage.
If there was only a fuselage (and no wing), then the fuselage would have a constant angle of attack.
However, the wing causes the angle of attack to vary. In front of the wing, the ow goes up a bit. Behind
the wing, there is a downwash. To deal with these complicated eects, we apply linearization. We thus
approximate
f
(x) as
f
(x) =
f0
+
d
f
(x)
d
(
0
). (5.1.4)
Here,
0
is the zero normal force angle of attack
C
N
=0
.
f0
is the corresponding fuselage angle of
attack. By using the above equation, we can nd a relation for C
m
fi
. We get
C
m
fi
=
f0
2S c
_
l
f
0
b
f
(x)
2
dx +
(
0
)
2S c
_
l
f
0
b
f
(x)
2
d
f
(x)
d
dx. (5.1.5)
5.1.3 The shift of the aerodynamic center
Adding the fuselage causes the aerodynamic center to shift. We know that
C
mw
= C
macw
+C
Nw
x x
acw
c
and C
m
wf
= C
mac
wf
+C
N
wf
x x
ac
wf
c
. (5.1.6)
19
Lets assume that adding the fuselage doesnt eect the normal force. Thus C
Nw
= C
N
wf
= C
N
. In this
case, we have
C
m
= C
m
wf
C
mw
= C
mac
C
N
x
ac
wf
x
acw
c
. (5.1.7)
We can dierentiate this equation with respect to . From the denition of the AC follows that
d(C
mac
)/d = 0. If we then also use the fact that dC
N
/d = C
N
, we nd that
x
ac
wf
x
acw
c
=
x
ac
c
=
1
C
N
d(C
m
)
d
. (5.1.8)
Part of this shift is caused by the fuselage, while the other part is caused by the new ow on the wing.
The shift in angle of attack, due to the fuselage, is
_
x
ac
c
_
fi
=
1
C
N
dC
m
fi
d
=
1
C
N
2S c
_
l
f
0
b
f
(x)
2
d
f
(x)
d
dx. (5.1.9)
The shift due to the ow induced on the wing is denoted by
_
xac
c
_
wi
. We dont have a clear equation for
this part of the shift. However, it is important to remember that this shift is only signicant for swept
wings. If there is a positive sweep angle, then the AC moves backward.
5.2 Adding the rest of the aircraft
5.2.1 The three parts
It is now time to examine an entire aircraft. The CG of this aircraft is positioned at (x
cg
, z
cg
). We split
this aircraft up into three parts.
First, there is the wing, with attached fuselage and nacelles. The position of the AC of this part is
(x
w
, z
w
). Two forces and one moment are acting in this AC. There are a normal force N
w
(directed
upward), a tangential force T
w
(directed to the rear) and a moment M
acw
.
Second, we have a horizontal tailplane. The AC of this part is at (x
h
, z
h
). In it are acting a normal
force N
h
, a tangential force T
h
and a moment M
ac
h
.
Third, there is the propulsion unit. Contrary to the other two parts, this part has no moment. It
does have a normal force N
p
and a tangential force T
p
. However, these forces are all tilted upward
by the thrust inclination i
p
. (So they have dierent directions then the force T
w
, T
h
, N
w
and
N
h
.) Also, the tangential force T
p
is dened to be positive when directed forward. (This is contrary
to the forces T
h
and T
w
, which are positive when directed backward.)
5.2.2 The equations of motion
We will now derive the equations of motion for this simplied aircraft. We assume that the aircraft is in
a fully symmetric ight. We then only need to consider three equations of motion. Taking the sum of
forces in X direction gives
T = T
w
+T
h
T
p
cos i
p
+N
p
sini
p
= W sin. (5.2.1)
Similarly, we can take the sum of forces in Z direction, and the sum of moments about the CG. (This is
done about the Y axis.) We then get
N = N
w
+N
h
+N
p
cos i
p
+T
p
sini
p
= W cos , (5.2.2)
20
M =M
acw
+N
w
(x
cg
x
w
) T
w
(z
cg
z
w
) +M
ac
h
+N
h
(x
cg
x
h
) T
h
(z
cg
z
h
) +. . .
. . . + (N
p
cos i
p
+T
p
sini
p
)(x
cg
x
p
) + (T
p
cos i
p
N
p
sini
p
)(z
cg
z
p
) = 0. (5.2.3)
We can simplify these equations, by making a couple of assumptions. We want to examine the stability of
the aircraft. The propulsion doesnt inuence the stability of the aircraft much. So we neglect propulsion
eects. We also neglect T
h
, since it is very small compared to T
w
. We assume that (z
cg
z
w
) 0. And
nally, we neglect M
ac
h
. This gives us
T = T
w
= W sin, (5.2.4)
N = N
w
+N
h
= W cos , (5.2.5)
M = M
acw
+N
w
(x
cg
x
w
) +N
h
(x
cg
x
h
) = 0. (5.2.6)
That simplies matters greatly.
5.2.3 Non-dimensionalizing the equations of motion
Lets non-dimensionalize the equations of motion of the previous paragraph. For that, we divide the force
equations by
1
2
V
2
S and the moment equation by
1
2
V
2
S c. This then gives us
C
T
= C
Tw
=
W
1
2
V
2
S
sin, (5.2.7)
C
N
= C
Nw
+C
N
h
_
V
h
V
_
2
S
h
S
=
W
1
2
V
2
S
cos , (5.2.8)
C
m
= C
macw
+C
Nw
x
cg
x
w
c
C
N
h
_
V
h
V
_
2
S
h
l
h
S c
= 0. (5.2.9)
A lot of new coecients have suddenly disappeared. These coecients are dened, such that
N = C
N
1
2
V
2
S, T = C
T
1
2
V
2
S, M = C
m
1
2
V
2
S c, (5.2.10)
N
w
= C
Nw
1
2
V
2
S, T
w
= C
Tw
1
2
V
2
S, M
acw
= C
macw
1
2
V
2
S c, (5.2.11)
N
h
= C
N
h
1
2
V
2
h
S
h
, T
h
= C
T
h
1
2
V
2
h
S
h
, M
ac
h
= C
mac
h
1
2
V
2
h
S
h
c
h
. (5.2.12)
Here,
1
2
V
2
h
is the average local dynamic pressure on the horizontal tail plain. Also, S
h
is the tailplane
surface area and c
h
is the MAC of the tailplane. The quantity
S
h
l
h
S c
is known as the tailplane volume.
And nally, we have dened the tail length l
h
= x
h
x
w
x
h
x
cg
.
5.3 The horizontal tailplane
5.3.1 Important angles
We will now take a closer look at the horizontal tailplane. There are three parameters that describe
the conguration of the horizontal tailplane. These parameters are the eective horizontal tailplane
angle of attack
h
, the elevator deection
e
and the elevator trim tab deection
te
. The three
angles are visualized in gure 5.1.
There is one angle which we will examine more closely now. And that is the eective angle of attack
h
.
It is dierent from the angle of attack of the aircraft . There are two important causes for this. First,
21
Figure 5.1: The angles of the horizontal tailplane.
the horizontal tail plane has an incidence angle i
h
, relative to the MAC of the wing. And second, the
tailplane experiences downwash, caused by the wing of the aircraft. The average downwash angle is
denoted by . By putting this all together, we nd that
h
= +i
h
. (5.3.1)
We can elaborate a bit further on this. The downwash mainly depends on . Linearization thus gives
d
d
(
0
). It follows that
h
=
_
1
d
d
_
(
0
) + (
0
+i
h
). (5.3.2)
From this follows that the derivate d
h
/d is given by
d
h
d
= 1
d
d
. (5.3.3)
This derivative is thus generally smaller than 1.
5.3.2 The horizontal tailplane normal force
Lets examine the normal force C
N
h
of the horizontal tailplane. This is a function of the three angles
h
,
e
and
te
. Applying linearization gives
C
N
h
= C
N
h
0
+
C
N
h
h
+
C
N
h
e
+
C
N
h
et
et
. (5.3.4)
The eect of the trim tab to the normal force is usually negligible. So, C
N
h
/
et
0. Also, since most
horizontal tailplanes are (nearly) symmetric, we have C
N
h
0
0. This simplies the above equation to
C
N
h
=
C
N
h
h
+
C
N
h
e
= C
N
h
h
+C
N
h
e
. (5.3.5)
Note that we have used a shorter notation in the right part of the above equation. The variables C
N
h
and C
N
h
are quite important for the balance of the control surface. If they are both negative, then the
control surface is called aerodynamically underbalanced. If, however, they are both positive, then
the control surface is called aerodynamically overbalanced.
5.3.3 The elevator deection necessary for equilibrium
We can ask ourselves, what elevator deection
e
should we have, to make sure our aircraft is in equilib-
rium? For that, we examine the moment equation (5.2.9). In this equation are the coecients C
Nw
and
22
C
N
h
. We can replace these by the linearizations
C
Nw
= C
Nw
(
0
) and C
N
h
= C
N
h
h
+C
N
h
e
. (5.3.6)
If we do this, we nd that
C
m
= C
macw
+C
Nw
(
0
)
x
cg
x
w
c
_
C
N
h
h
+C
N
h
e
_
_
V
h
V
_
2
S
h
l
h
S c
= 0. (5.3.7)
We can now also substitute the relation (5.3.2) for
h
. Doing this, and working the whole equation out,
gives
C
m
= C
m0
+C
m
(
0
) +C
m
e
e
= 0, (5.3.8)
where C
m
is known as the static longitudinal stability and C
m
e
is the elevator eectivity. To-
gether with the constant C
m0
, they are dened as
C
m0
= C
macw
C
N
h
(
0
+i
h
)
_
V
h
V
_
2
S
h
l
h
S c
, (5.3.9)
C
m
= C
Nw
x
cg
x
w
c
C
N
h
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
, (5.3.10)
C
m
e
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
. (5.3.11)
We can now solve for
e
. It is simply given by
e
=
C
m0
+C
m
(
0
)
C
m
e
. (5.3.12)
This is a nice expression. But do remember that we have made several linearizations to derive this
equation. The above equation is thus only valid, when all the linearizations are allowed.
23
6. Longitudinal stability derivatives
We have seen a lot of stability derivatives in previous chapters. However, it would be nice to know
their values. Were therefore going to derive some relations for them. In this chapter, we will look at
longitudinal stability derivatives. In the next chapter, well examine lateral stability derivatives.
6.1 Nominal stability derivatives
6.1.1 Methods of nding the stability derivatives
There are three methods to nd the stability derivatives. The rst one is of course by performing
ight tests or wind tunnel tests. These tests are, however, quite expensive. An alternative is using
computational uid dynamics (CDF). This is usually less expensive, but it still requires a lot of work.
Finally, simple analytic expressions can be used. They are usually not very accurate. (Especially not
for strange aircraft congurations.) However, they dont require a lot of work. In this chapter, were
going to examine these analytic expressions.
6.1.2 Equations of motion
Before we will nd stability derivatives, we rst need to re-examine the equations of motion. The
symmetric equations of motion, for an airplane in a steady ight, are
X =Dcos +Lsin +T
p
cos(
0
+i
p
) = W sin
0
, (6.1.1)
Z =Lcos Dsin T
p
sin(
0
+i
p
) = W cos
0
. (6.1.2)
Here,
0
is the initial angle of attack. (It is now not the zero-lift angle of attack.) Also, now denotes
the deviation from this ight condition. We assume
0
+ i
p
is small, so we can use the small angle
approximation. If we also non-dimensionalize the above relations, we nd that
C
X
=C
D
cos +C
L
sin +T
c
=
W
1
2
V
2
S
sin
0
, (6.1.3)
C
Z
=C
L
cos C
D
sin T
c
(
0
+i
p
) =
W
1
2
V
2
S
cos
0
, (6.1.4)
where we have dened
T
c
=
T
p
1
2
V
2
S
. (6.1.5)
6.1.3 Nominal ight conditions
Lets examine an aircraft ying a steady horizontal ight. We will now try to nd the nominal stability
derivatives C
X0
, C
Z0
and C
m0
. Since the aircraft is ying horizontally, we have =
0
= 0. (Remember
that is the deviation from the steady ight.) The relations of the previous paragraph now turn into
C
X0
= C
D
+T
c
= 0 and C
Z0
= C
L
T
c
(
0
+i
p
) =
W
1
2
V
2
S
. (6.1.6)
Finally, from moment equilibrium follows that C
m0
= 0.
24
6.2 Velocity stability derivatives
6.2.1 The basic relations
Now lets nd the stability derivatives with respect to the velocity. They are C
Xu
, C
Zu
and C
mu
. They
are very hard to determine experimentally. This is because wind tunnels and ying aircraft cant change
their velocity in a very accurate way. Luckily, we can nd expressions for them.
Lets start to examine C
Xu
. We can recall that
C
Xu
=
1
1
2
V S
X
V
and X = C
X
1
2
V
2
S. (6.2.1)
(We have used the fact that V/u 1.) Taking the derivative of the second relation, with respect to
V , gives
X
V
= C
X
V S +
C
X
V
1
2
V
2
S. (6.2.2)
Inserting this into the rst relation will give
C
Xu
= 2C
X
+
C
X
V
V. (6.2.3)
In a similar way, we can nd the expressions for C
Zu
and C
mu
. They are
C
Zu
= 2C
Z
+
C
Z
V
V and C
mu
= 2C
m
+
C
m
V
V. (6.2.4)
6.2.2 Rewriting the relations
There are still some terms we dont know in the relations of the previous paragraph. They are C
X
, C
Z
,
C
m
, C
X
/V , C
Z
/V and C
m
/V . How can we rewrite them?
We are considering deviations from the steady horizontal ight. So we can replace C
X
by C
X0
= C
D
+T
c
.
Similarly, C
Z
is replaced by C
Z0
= C
L
T
c
(
0
+i
p
) and C
m
by C
m0
= 0. That simplies the equations
quite a bit.
The derivatives are a bit harder to rewrite. At a steady horizontal ight, we have C
X
= C
D
+ T
c
and
C
Z
= C
L
T
c
(
0
+i
p
). Dierentiating this gives
C
X
V
=
C
D
V
+
T
c
V
and
C
Z
V
=
C
L
V
T
c
V
(
0
+i
p
). (6.2.5)
That leaves us with some more derivatives. First, lets examine C
D
/V , C
L
/V and C
m
/V . To
nd them, we have to know why the coecients C
D
, C
L
and C
m
vary with airspeed. These variations
are partly caused by changes in Mach number M, changes in thrust T
c
and changes in Reynolds number
Re. Although changes in the Reynolds number may be neglected, we do have to consider M and T
c
.
This implies that
C
D
V
=
C
D
M
M
V
+
C
D
T
c
T
c
V
, (6.2.6)
C
L
V
=
C
L
M
M
V
+
C
L
T
c
T
c
V
, (6.2.7)
C
m
V
=
C
m
M
M
V
+
C
m
T
c
T
c
V
. (6.2.8)
25
If we use this, in combination with earlier equations, we will nd that
C
Xu
=2C
D
+ 2T
c
+
_
1
C
D
T
c
_
dT
c
dV
V
C
D
M
M, (6.2.9)
C
Zu
=2C
L
2T
c
(
0
+i
p
)
_
(
0
+i
p
) +
C
L
T
c
_
dT
c
dV
V
C
L
M
M, (6.2.10)
C
mu
=
C
m
T
c
dT
c
dV
V +
C
m
M
M. (6.2.11)
6.2.3 The thrust derivative
The equations of the previous paragraph still have a lot of derivatives. We wont go into detail on
derivatives with respect T
c
or M. However, we will consider dT
c
/dV . It turns out that we can write this
derivative as
dT
c
dV
= k
T
c
V
, (6.2.12)
where the constant k depends on the ight type. If we have a gliding ight, then T
c
= 0. Thus also
dT
c
/dV = 0 and therefore k = 0. If we have a jet-powered aircraft, then T
p
= T
c
1
2
V
2
S = constant.
From this follows that k = 2. Finally, for propeller-powered aircraft, we have T
p
V = T
c
1
2
V
3
S =
constant. This implies that k = 3.
Lets use the above relation to simplify our equations. The equations for C
Xu
, C
Zu
and C
mu
now become
C
Xu
=2C
D
+
_
2 k
_
1
C
D
T
c
__
T
C
D
M
M, (6.2.13)
C
Zu
=2C
L
+
_
(k 2)(
0
+i
p
) +k
C
L
T
c
_
T
C
L
M
M, (6.2.14)
C
mu
=k
C
m
T
c
T
c
+
C
m
M
M. (6.2.15)
When specic data about the type of ight is known, the above equations can be simplied even further.
For example, when the ight is at low subsonic velocities, then Mach eects may be neglected. Thus
C
D
/M = C
L
/M = C
m
/M = 0. In other cases, there are often other simplications that can be
performed.
6.3 Angle of attack stability derivatives
6.3.1 The basic relations for C
X
and C
Z
We will now try to nd relations for C
X
, C
Z
and C
m
. First we examine C
X
and C
Z
. They are
dened as
C
X
=
1
1
2
V S
X
w
=
C
X
and C
Z
=
1
1
2
V S
Z
w
=
C
Z
. (6.3.1)
If we take the derivative of equations (6.1.3) and (6.1.4), we nd that
C
X
=C
D
cos +C
D
sin +C
L
sin +C
L
cos , (6.3.2)
C
Z
=C
L
cos +C
L
sin C
D
sin C
D
cos . (6.3.3)
We are examining an aircraft performing a steady horizontal ight. Thus = 0. This simplies the
above equations to
C
X
= C
L
C
D
and C
Z
= C
L
C
D
C
L
C
N
. (6.3.4)
In the last part of the above equation, we have used the fact that C
D
is much smaller than C
L
.
26
6.3.2 Rewriting the relation for C
X
We can try to rewrite the relation for C
X
. To do this, we examine C
D
. Lets assume that the aircraft
has a parabolic drag curve. This implies that
C
D
= C
D0
+
C
2
L
Ae
, which, in turn, implies that C
D
= 2
C
L
Ae
C
L
. (6.3.5)
If we combine this with the former expression for C
X
, we wind up with
C
X
= C
L
_
1 2
C
L
Ae
_
. (6.3.6)
6.3.3 The relation for C
m
In a previous chapter, we have already considered C
m
. After neglecting the eects of many parts of the
aircraft, we wound up with
C
m
= C
Nw
x
cg
x
w
c
C
N
h
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
. (6.3.7)
6.4 Pitch rate stability derivatives
6.4.1 The reasons behind the changing coecients
We will now try to nd C
Xq
, C
Zq
and C
mq
. Luckily, C
X
doesnt get inuenced a lot by q. So it is usually
assumed that C
Xq
= 0. That saves us some work. We now only need to nd C
Zq
and C
mq
. They are
dened as
C
Zq
=
1
1
2
V S c
Z
q
=
C
Z
q c
V
and C
mq
=
1
1
2
V S c
2
M
q
=
C
m
q c
V
. (6.4.1)
To nd C
Zq
and C
mq
, we rst have to understand some theory behind rotations. Why do the coecients
change, when the aircraft rotates? This is because the eective angle of attack changes. Imagine an
aircraft with its nose pitching upward. The tailplane of the aircraft is thus pitching downward. Now
imagine youre sitting on the tailplane. As seen from the tailplane, it looks like the ow of air is coming
upward. This means that the tailplane experiences a bigger angle of attack.
To nd the exact value of the change in angle of attack , we examine the center of rotation. This
is the point about which the aircraft appears to be rotating. The center of rotation lies on the Z
s
-axis.
The apparent rotation itself is performed with a radius R, which is given by
R =
V
q
. (6.4.2)
The change in angle of attack , at any point x on the airplane, is then given by
=
x x
cg
R
=
x x
cg
c
q c
V
. (6.4.3)
6.4.2 The changing coecients
We know that the apparent angle of attack changes across the aircraft. This is especially important for
the horizontal tailplane. In fact, the change in angle of attack of the tailplane is given by
h
=
x
h
x
cg
c
q c
V
l
h
c
q c
V
. (6.4.4)
27
This change in angle of attack causes the normal force of the tailplane to change. In fact, it changes by
an amount
C
N
h
= C
N
h
_
V
h
V
_
2
S
h
S
h
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
q c
V
. (6.4.5)
Similarly, the change of the moment is given by
C
m
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
h
= C
N
h
_
V
h
V
_
2
S
h
l
2
h
S c
2
q c
V
. (6.4.6)
We know that C
Zq
= C
Z
/
q c
V
and C
mq
= C
m
/
q c
V
. By using this, we can nd the contributions of the
horizontal tailplane to C
zq
and C
mq
. They are
_
C
Zq
_
h
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
and
_
C
mq
_
h
= C
N
h
_
V
h
V
_
2
S
h
l
2
h
S c
2
. (6.4.7)
(The minus sign in the left part appeared, because C
N
is dened upward, while C
Z
is dened downward.)
There is, however, one small problem. The aircraft doesnt consist of only a horizontal tailplane. It also
has various other parts. But it is very dicult to calculate the eects of all these parts. For that reason,
we make an estimate. We say that the contribution of the full aircraft C
Zq
is twice the contribution of
the horizontal tailplane
_
C
Zq
_
h
. This implies that
C
Zq
= 2
_
C
Zq
_
h
= 2C
N
h
_
V
h
V
_
2
S
h
l
h
S c
. (6.4.8)
For C
mq
, we apply the same trick. But instead of a factor 2, a factor between 1.1 to 1.2 should now be
used, depending on the aircraft. We thus get
C
mq
= (1.1 1.2)
_
C
mq
_
h
= (1.1 1.2)C
N
h
_
V
h
V
_
2
S
h
l
2
h
S c
2
. (6.4.9)
6.5 Other longitudinal stability derivatives
6.5.1 Vertical acceleration stability derivatives
We now examine C
Z
and C
m
. (We assume C
X
= 0.) To do this, we look at the horizontal tailplane.
During a steady ight, it has an eective angle of attack
h
= +i
h
=
d
d
+i
h
. (6.5.1)
Now lets suppose that the aircraft experiences a change in angle of attack. This causes the downwash
angle of the wing to change. A time t = l
h
/V later will this change be experienced by the horizontal
tailplane. In other words, the downwash (t) at time t depends on the angle of attack (t t) at time
t t. A linear approximation of (t t) is given by
(t t) = (t) t. (6.5.2)
By using this, we nd that the downwash is given by
(t) =
d
d
(t t) =
d
d
(t)
d
d
l
h
V
. (6.5.3)
This implies that the eective angle of attack is given by
h
=
d
d
+
d
d
l
h
V
+i
h
. (6.5.4)
28
The change in eective angle of attack is
h
=
d
d
l
h
c
c
V
. (6.5.5)
We now have enough data to nd the coecients C
Z
and C
m
. We know that
C
Z
= C
N
h
_
V
h
V
_
2
S
h
S
h
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
d
d
c
V
, (6.5.6)
C
m
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
h
= C
N
h
_
V
h
V
_
2
S
h
l
2
h
S c
2
d
d
c
V
. (6.5.7)
The coecients C
Z
and C
m
are now given by
C
Z
=
1
1
2
S c
Z
w
=
C
Z
c
V
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
d
d
, (6.5.8)
C
m
=
1
1
2
S c
2
M
w
=
C
m
c
V
= C
N
h
_
V
h
V
_
2
S
h
l
2
h
S c
2
d
d
. (6.5.9)
6.5.2 Elevator angle stability derivatives
The last stability derivatives we will consider in this chapter are C
X
e
, C
Z
e
and C
m
e
. Usually C
X
doesnt vary a lot with
e
, so we assume that C
X
e
= 0. But what about C
Z
e
? Well, this one is given by
C
Z
e
= C
N
h
e
_
V
h
V
_
2
S
h
S
. (6.5.10)
Finally there is C
m
e
. We can nd that it is
C
m
e
= C
Z
e
x
h
x
cg
c
C
N
e
_
V
h
V
_
2
S
h
l
h
S c
. (6.5.11)
The coecient C
Z
e
usually isnt very important. However, C
m
e
is very important. This is because the
whole goal of an elevator is to apply a moment to the aircraft.
6.5.3 Eects of moving the center of gravity
We have one topic left to discuss. What happens when the CG moves from position 1 to position 2? In
this case, several coecients change. This goes according to
C
m
2
= C
m
1
C
Z
x
cg2
x
cg1
c
, (6.5.12)
C
Zq
2
= C
Zq
1
C
Z
x
cg2
x
cg1
c
, (6.5.13)
C
mq
2
= C
mq
1
_
C
Zq
1
+C
m
1
_
x
cg2
x
cg1
c
+C
Z
_
x
cg2
x
cg1
c
_
2
, (6.5.14)
C
m
2
= C
m
1
C
Z
x
cg2
x
cg1
c
. (6.5.15)
29
7. Lateral stability derivatives
In the previous chapter, we found relations for the longitudinal stability derivatives. Now well examine
the lateral stability derivatives.
7.1 Sideslip angle stability derivatives
7.1.1 Horizontal forces
We start by examining derivatives with respect to the sideslip angle . This angle is dened as
= arcsin
_
v
V
_
v
V
. (7.1.1)
We will now examine C
Y
. Lets examine an aircraft with a sideslip angle . This sideslip angle causes
a horizontal force Y on the aircraft. The most important contributors to this horizontal force are the
fuselage and the vertical tailplane.
First lets examine the vertical tailplane. Luckily, this tailplane has a lot of analogies with the horizontal
tailplane, so we can use some short cuts. For example, the force acting on the vertical tailplane is given
by
_
C
Y
_
v
= C
Yv
d
v
d
_
V
v
V
_
2
S
v
S
, (7.1.2)
where S
v
is the vertical tailplane surface area and V
v
is the average velocity over it. Also, C
Yv
=
C
Yv
v
.
Lets take a closer look at the eective angle of attack of the tailplane
v
. Its not equal to .
This is because the fuselage also alters the ow by an angle . ( is similar to the downwash for the
horizontal tailplane.) The vertical tailplane thus has an angle of attack of
v
= ( ). (The minus is
present due to sign convention.) Inserting this relation into the above equation gives
_
C
Y
_
v
= C
Yv
_
1
d
d
__
V
h
V
_
2
S
v
S
. (7.1.3)
Usually, most terms in the above equation are known. Only d/d is still a bit of a mystery. It is very
hard to determine. However, it usually is negative. (So d/d < 0.)
Next to the tailplane contribution, there is usually also a contribution by the fuselage. However, we dont
go into depth on that here.
7.1.2 Rolling momemts
Now lets examine the so-called eective dihedral C
l
. The coecient C
l
was dened as
C
l
=
L
1
2
V
2
b
. (7.1.4)
It is important to note that L is not the lift. It is the moment about the X axis. C
l
is thus not the lift
coecient either.
The eective dihedral C
l
mostly depends on the wing set-up. Both the wing-dihedral and the
sweep angle strongly eect C
l
. (The wing-dihedral is the angle with which the wings have been
tilted upward, when seen from the fuselage.)
First lets examine an aircraft with a wing-dihedral . We suppose that the aircraft is sideslipping to
the right. From the aircraft, it now appears as if part of the ow is coming from the right. This ow
30
crouches under the right wing, pushing it more upward. However, it ows over the left wing, pushing
that one downward a bit. This thus causes the aircraft to roll to the left.
To nd more info about the moment caused by the wing-dihedral, we need to examine the new angle of
attacks of the wings
w
l
and
wr
. By using small angle approximations, we can nd that
w
l
and
wr
+. (7.1.5)
The changes in the angles of attack are thus
w
l
= and
wr
= . So the moment caused by
the wing-dihedral is approximately linearly dependend on both and . (We thus have C
l
.)
Second, we look at an aircraft with a wing sweep angle . The lift of a wing strongly depends on the
ow velocity perpendicular to the leading edge. Again, we suppose that part of the ow is coming in
from the right. This causes the ow to be more perpendicular w.r.t. to the right wing leading edge, thus
increasing the lift. However, the ow is more parallel w.r.t. the leading edge of the left wing. The left
wing thus has reduced lift. It can be shown that the change in lift for the aircraft, due to a sweep angle
, is
L = C
L
1
2
V
2
S
2
_
cos
2
( ) cos
2
( +)
_
C
L
1
2
V
2
S sin(2) . (7.1.6)
The rightmost part of the equation is an approximation. It only works for small values of . The above
equation shows that the lift more or less linearly depends on and . It can be shown that the same
holds for the moment C
l
. The eective dihedral C
l
is thus proportional to .
Next to the wing, also the horizontal tailplane and the fuselage eect C
l
. However, we wont examine
these eects.
7.1.3 Yawing moments
The stability derivative C
n
is called the static directional stability. (Its also known as the Weath-
ercock stability.) It is about just as important as C
m
. It can be shown that, if C
n
is positive, then
the aircraft is stable for yawing motions. However, if C
n
is negative, then the aircraft is unstable for
yawing motions.
Naturally, we want to have C
n
> 0. Luckily, the wings and the horizontal tailplane have a slightly
positive eect on C
n
. However, the fuselage causes C
n
to decrease. To compensate for this, a vertical
tailplane is used, strongly increasing C
n
.
Lets examine the eects of this tailplane. You may remember that the normal force on it was
_
C
Y
_
v
= C
Yv
_
1
d
d
__
V
v
V
_
2
S
v
S
. (7.1.7)
This normal force causes a moment
_
C
n
_
v
=
_
C
Y
_
v
_
z
v
z
cg
b
sin
0
+
x
v
x
cg
b
cos
0
_
. (7.1.8)
We can usually assume
0
to be small. (Thus cos
0
1.) Also,
zvzcg
b
sin
0
is usually quite small,
compared to the other term, so we neglect it. If we also use the tail length of the vertical tailplane
l
v
= x
v
x
cg
, we can rewrite the above equation to
_
C
n
_
v
= C
Yv
_
1
d
d
__
V
v
V
_
2
S
v
l
v
Sb
. (7.1.9)
From this, the correspondence to C
m
again becomes clear. To emphasize this, we once more show the
equation for the horizontal tailplane contribution to C
m
. Rather similar to
_
C
n
_
v
, it was given by
(C
m
)
h
= C
N
h
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
. (7.1.10)
31
7.2 Roll rate stability derivatives
7.2.1 Horizontal forces
It is time to investigate the eects of roll. In other words, we will try to nd the stability derivatives C
Yp
,
C
lp
and C
np
. (Of these three, C
lp
is the most important.) First we examine C
Yp
. It is dened such that
Y
p
= C
Yp
pb
2V
1
2
V
2
S. (7.2.1)
The only part having a more or less signicant contribution to C
Yp
is the vertical tailplane. Lets examine
a rolling aircraft. Due to this rolling, the vertical tailplane is moving horizontally. It will therefore get an
eective angle of attack. This causes a horizontal force. A positive roll rate gives a negative horizontal
force. C
Yp
is thus negative.
However, C
Yp
is usually rather small. For this reason it is often neglected. So we say that C
Yp
0.
7.2.2 Rolling moments
Now we will try to nd C
lp
. Again, we examine a rolling aircraft. One wing of the aircraft goes up, while
the other one goes down. This motion changes the eective angle of attack and thus also the lift of the
wings. The upward going wing will get a lower lift, while the downward moving wing will experience a
bigger amount of lift. The wing forces thus cause a moment opposite to the rolling motion. This means
that C
lp
is highly negative. It also implies that the rolling motion is very strongly damped. (We will see
this again, when examining the aperiodic roll in chapter 10.)
We can also investigate the actual eects of the rolling motion. To do this, we examine a chord at a
distance y from the fuselage. This chord will have an additional vertical velocity of py. The change in
angle of attack of this chord thus is
=
py
V
=
pb
2V
y
b/2
. (7.2.2)
So a chord that is far away from the fuselage will experience a big change in angle of attack. The change
in lift is therefore biggest for these chords. These chords also have a relatively big distance to the CG of
the aircraft. For this reason, they will signicantly eect the resulting moment.
Other parts of the aircraft may also inuence C
lp
slightly. However, their inuence is very small, compared
to the eects of the wings. The contributions of the other parts are therefore neglected.
7.2.3 Yawing moments
To nd C
np
, we again examine a rolling aircraft. The rolling of the aircraft has two important eects.
First, we look at the vertical tailplane. As was discussed earlier, this tailplane will move. It thus has an
eective angle of attack, and therefore a horizontal force. This horizontal force causes the aircraft to yaw.
A positive rolling motion causes a positive yawing moment. The vertical tailplane thus has a positive
contribution to C
np
. (So
_
C
np
_
v
> 0.)
But now lets look at the wings. Lets suppose that the aircraft is rolling to the right. For the right wing,
it then appears as if the ow comes (partially) from below. The lift is per denition perpendicular to the
direction of the incoming ow. The lift vector is thus tilted forward. Part of this lift causes the aircraft
to yaw to the left. The opposite happens for the left wing: The lift vector is tilted backward. Again, this
causes a yawing moment to the left. (This eect is known as adverse yaw.) So we conclude that, due
to the wings, a positive rolling motion results in a negative yawing moment. We thus have
_
C
np
_
w
< 0.
32
For most normal ights, the eects of the vertical stabilizer are a bit bigger than the eects of the wing.
We thus have C
np
> 0. However, high roll rates and/or high angles of attack increase the eect of the
wings. In this case, we will most likely have C
np
< 0.
7.3 Yaw rate stability derivatives
7.3.1 Horizontal forces
In this part, well try to nd the stability derivatives C
Yr
, C
lr
and C
nr
. We start with the not very
important coecient C
Yr
. Lets examine a yawing aircraft. Due to the yawing moment, the vertical
tailplane moves horizontally. Because of this, its eective angle of attack will change by
v
=
rl
v
V
=
rb
2V
l
v
b/2
. (7.3.1)
The contribution of the tailplane to C
Yr
is now given by
(C
Yr
)
v
= 2C
Yv
_
V
v
V
_
2
S
v
l
v
Sb
. (7.3.2)
The contribution is positive, so (C
Yr
)
v
> 0. Next to the vertical tailplane, there are also other parts
inuencing C
Yr
. Most parts have a negative contribution to C
Yr
. However, none of these contributions
are as big as (C
Yr
)
v
. The stability derivative C
Yr
is therefore still positive. It is only slightly smaller
than (C
Yr
)
v
.
7.3.2 Rolling moments
We will now examine C
lr
. There are two important contributions to C
lr
. They come from the vertical
tailplane and the wings.
First we examine the vertical tailplane. We just saw that a yawing motion causes a horizontal force on
the vertical tailplane. This horizontal force causes a moment
(C
lr
)
v
= (C
Yr
)
v
_
z
v
z
cg
b
cos
0
x
v
x
cg
b
sin
0
_
. (7.3.3)
A positive yawing motion results in a positive moment. We thus have (C
lr
)
v
> 0.
Now lets examine the wings. Because of the yawing motion, one wing will move faster, while the other
wing will move slower. This causes the lift on one wing to increase, while it will decrease on the other
wing. This results in a rolling moment.
Sadly, its rather hard to nd an equation for the moment caused by the wings. So we wont examine
that any further. However, it is important to remember that a positive yawing motion causes a positive
rolling moment. We thus have (C
lr
)
w
> 0. The total coecient C
lr
is then, of course, also positive.
7.3.3 Yawing moments
Finally, we examine C
nr
. The most important contribution comes from the vertical tailplane. We know
that a yawing motion causes a horizontal force on the vertical tailplane. This force is such that it damps
the yawing motion. The contribution (C
nr
)
v
is thus very highly negative. In fact, it is given by
(C
nr
)
v
= (C
Yr
)
v
l
v
b
= 2C
Yv
_
V
v
V
_
2
S
v
l
2
v
Sb
2
. (7.3.4)
33
The vertical tailplane is about the only part seriously eecting the coecient C
nr
. Sometimes also the
fuselage eects it. This eect is also negative. (So (C
nr
)
f
< 0.) The coecient C
nr
itself is thus also
very strongly negative. This implies that the yawing motion is highly damped.
7.4 Other lateral stability derivatives
7.4.1 Aileron deections
Lets consider the ailerons. The aileron deection
a
is dened as
a
=
a
right
a
left
. (7.4.1)
A deection of the ailerons causes almost no change in horizontal forces. We thus have C
Y
a
= 0. The
so-called aileron eectiveness C
l
a
is, of course, not negligible. (Causing moments about the X axis
is what ailerons are for.) The coecient C
n
a
usually isnt negligible either. By the way, the moments
caused by an aileron deection are given by
L = C
l
a
a
1
2
V
2
Sb and N = C
n
a
a
1
2
V
2
Sb. (7.4.2)
C
l
a
is negative. A positive aileron deection causes a negative rolling moment. C
n
a
is, however, positive.
So a positive aileron deection causes positive yaw.
7.4.2 Rudder deections
The rudder stability derivatives are C
Y
r
, C
l
r
and C
n
r
. The forces and moments caused by a rudder
deection are given by
Y = C
Y
r
r
1
2
V
2
S, L = C
l
r
r
1
2
V
2
Sb. and N = C
n
r
r
1
2
V
2
Sb. (7.4.3)
The coecient C
Y
r
is given by
C
Y
r
= C
Yv
_
V
v
V
_
2
S
v
S
. (7.4.4)
The coecient C
l
r
is then given by
C
l
r
= C
Y
r
_
z
v
z
cg
b
cos
0
x
v
x
cg
b
sin
0
_
. (7.4.5)
C
l
r
is positive. This means that a positive rudder deection causes a positive rolling moment. This
eect is generally not desirable. Especially if z
v
z
cg
is big, measures are often taken to reduce this
eect.
Finally, the rudder eectiveness C
n
r
is given by
C
n
r
= C
Y
r
l
v
b
. (7.4.6)
This coecient is negative. A positive rudder deection thus causes a negative yawing moment.
7.4.3 Spoiler deections
The last things we examine are the spoilers. Spoilers are often used in high-speed aircraft to provide roll
control. A spoiler deection
s
on the left wing is dened to be positive. Due to this denition, we have
C
l
s
< 0 and C
n
s
< 0. Of these two, the latter is the most important.
34
8. Longitudinal stability and control
In this chapter, we will start to investigate the stability of the entire aircraft. This can be split up into
two parts: longitudinal and lateral stability. In this chapter, we will only look at longitudinal stability.
8.1 Stick xed longitudinal stability
8.1.1 Eects of the wing and the tail on stability
To start our investigation in the stability of an aircraft, we reexamine the moment equation. In an earlier
chapter, we found that
C
m
= C
mac
+C
Nw
(
0
)
x
cg
x
w
c
C
N
h
_
V
h
V
_
2
S
h
l
h
S c
= 0, (8.1.1)
where C
N
h
is given by
C
N
h
= C
N
h
_
(
0
)
_
1
d
d
_
+ (
0
+i
h
)
_
+C
N
h
e
e
. (8.1.2)
We can also rewrite the moment equation to C
m
= C
mw
+C
m
h
. In this equation, C
mw
is the contribution
due to the wings. Similarly, C
m
h
is the contribution from the horizontal tailplane. They are both given
by
C
mw
= C
mac
+C
Nw
(
0
)
x
cg
x
w
c
and C
m
h
= C
N
h
_
V
h
V
_
2
S
h
l
h
S c
. (8.1.3)
Taking a derivative of the moment equation will give us C
m
= C
mw
+C
m
h
, where
C
mw
= C
Nw
x
cg
x
w
c
and C
m
h
= C
N
h
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
. (8.1.4)
To achieve stability for our aircraft, we should have C
m
< 0. Usually, the wing is in front of the CG.
We thus have x
cg
x
w
> 0 and also C
mw
> 0. The wing thus destabilizes the aircraft. Luckily, the
horizontal tailplane has a stabilizing eect. This is because C
m
h
< 0. To achieve stability, the stabilizing
eect of the tailplane should be bigger than the destabilizing eect of the wings. We should thus have
|C
mw
| < |C
m
h
|. (8.1.5)
8.1.2 Eects of the center of gravity on stability
We will now examine the eects of the CG on the stability. To do this, we suppose x
cg
increases (the
CG moves to the rear). However, the other parameters (including
e
) stay constant. The movement of
the CG causes C
m
to increase. At a certain point, we will reach C
m
= 0. When the CG moves beyond
this position, the aircraft becomes unstable.
Lets examine the point at which C
m
= 0. We remember, from a previous chapter, that this point is
called the neutral point. And, because the stick deection is constant (
e
is constant), we call this point
the stick xed neutral point. Its x coordinate is denoted by x
n
fix
. To nd it, we can use
C
m
= C
Nw
x
n
fix
x
w
c
+C
N
h
_
1
d
d
__
V
h
V
_
2
S
h
S
x
n
fix
x
h
c
. (8.1.6)
35
After some mathematical trickery, we can nd the position of the stick xed neutral point, with respect
to the wing. It is given by
x
n
fix
x
w
c
=
C
N
h
C
N
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
. (8.1.7)
From this, we can also derive the position of the stick xed neutral point, with respect to the aircraft
CG. This is given by
C
m
= C
N
x
cg
x
n
fix
c
. (8.1.8)
The quantity
xcgxn
fix
c
is known as the (stick xed) stability margin. It is an indication of how much
the CG can move, before the aircraft becomes unstable.
8.1.3 The elevator trim curve
Now lets examine the eects of the elvator deection
e
. We know from a previous chapter that the
elevator deection necessary to keep the aircraft in equilibrium is
e
=
1
C
m
e
(C
m0
+C
m
(
0
)) . (8.1.9)
e
depends on . To see how, we plot
e
versus . We usually do this, such that the y axis is reversed.
(Positive
e
appear below the horizontal axis.) Now we examine the slope of this graph. It is given by
d
e
d
=
C
m
C
m
e
. (8.1.10)
We always have C
m
e
< 0. To make sure we have C
m
< 0 as well, we should have d
e
/d < 0. The line
in the
e
, graph should thus go upward as increases. (Remember that we have reversed the y axis of
the graph!)
e
also depends on the aircraft velocity V . To see how, we will rewrite equation (8.1.9). By using
C
N
C
N
(
0
)
W
1
2
V
2
S
, we nd that
e
=
1
C
m
e
_
C
m0
+
C
m
C
N
W
1
2
V
2
S
_
. (8.1.11)
We can now plot
e
against V . (Again, we reverse the
e
axis.) We have then created the so-called
elevator trim curve. Its slope is given by
d
e
dV
=
4W
V
3
S
1
C
m
e
C
m
C
N
. (8.1.12)
To have C
m
< 0, we should have d
e
/dV > 0. The line in the graph should thus go downward. Also, if
you want to y faster in a stable aircraft, you should push your stick forward.
8.2 Stick free longitudinal stability
8.2.1 The stick free elevator deection
Previously, we have assumed that
e
is constant. The pilot has his stick xed. But what will happen if
the pilot releases his stick? It would be nice if the aircraft remains stable as well.
36
Lets suppose the pilot releases the stick. In that case, aerodynamic force will give the elevator a certain
stick free elevator deection
e
free
. To nd
e
free
, we examine the moments H
e
about the elevator
hinge point. (Or, to be more precise, we look at the non-dimensional version C
he
.) Contributing to this
hinge moment are the horizontal tailplane, the elevator and the trim tab. By using a linearization, we
nd that
C
he
free
= C
h
h
+C
h
e
free
+C
h
te
= 0. (8.2.1)
It follows that the stick free elevator deection is
e
free
=
C
h
C
h
C
h
t
C
h
te
. (8.2.2)
From this, we can also derive that
_
d
e
d
_
free
=
C
h
C
h
_
1
d
d
_
. (8.2.3)
The elevator deection thus changes as the angle of attack is changed.
8.2.2 Dierences in the moment due to the stick free evelator
The free elevator deection eects the contribution C
m
h
of the horizontal tailplane to the moment C
m
.
Lets investigate this. We can remember that
C
m
h
=
_
C
N
h
h
+C
N
h
e
_
_
V
h
V
_
2
S
h
l
h
S c
. (8.2.4)
We now substitute
e
by
e
free
. If we also dierentiate with respect to , and work things out, we will
get
C
m
h
free
=
_
C
N
h
C
N
h
C
h
C
h
__
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
. (8.2.5)
If we compare this equation to the right side of equation (8.1.4), we see that only C
N
h
has changed. In
fact, we can dene
C
N
h
free
= C
N
h
C
N
h
C
h
C
h
. (8.2.6)
If we use C
N
h
free
, instead of C
N
h
, then our stability analysis is still entirely valid.
Lets take a closer look at the dierences between C
N
h
free
and C
N
h
. This dierence is the term
C
N
h
C
h
C
h
. We know that C
N
h
> 0. The term C
h
is interesting. If it would be positive, then it can be
shown that the elevator position is unstable. So, we have to have C
h
< 0. Finally there is C
h
. This
term can be either positive or negative. If it is positive (C
h
> 0), then the stick free aircraft will be
more stable than the stick xed aircraft. If, however, it is negative (C
h
< 0), then it will be less stable,
or possibly even unstable.
8.2.3 The stick free neutral point
Lets nd the stick free neutral point x
n
free
. Finding x
n
free
goes similar to nding x
n
fix
. In fact, we
can adjust equations (8.1.7) and (8.1.8) to
x
n
free
x
w
c
=
C
N
h
free
C
N
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
, (8.2.7)
37
C
m
free
= C
N
free
x
cg
x
n
free
c
. (8.2.8)
In this equation, we have C
N
free
C
N
. This is because the elevator has a negligible inuence on C
N
,
compared to the inuence of the wing.
We can also nd the position of the stick free neutral point, with respect to the stick xed neutral point.
Subtracting equation (8.1.7) from equation (8.2.7) gives
x
n
free
x
n
fix
c
=
C
N
h
C
N
C
h
C
h
_
1
d
d
__
V
h
V
_
2
S
h
l
h
S c
=
C
m
C
N
C
h
C
h
_
1
d
d
_
. (8.2.9)
8.2.4 Elevator stick forces
Now we will examine the stick forces which the pilot should exert. We denote the stick deection by
s
e
. By considering the work done by the pilot, we nd that F
e
ds
e
+ H
e
d
e
= 0. From this follows that
the stick force F
e
is given by
F
e
=
d
e
ds
e
H
e
=
d
e
ds
e
C
he
1
2
V
2
h
S
e
c
e
. (8.2.10)
By the way S
e
is the elevator surface and c
e
is the mean elevator chord. If we massively rewrite the
above equation, we can eventually nd that
F
e
=
d
e
ds
e
S
e
c
e
_
V
h
V
_
2
_
C
h0
1
2
V
2
+C
h
W
S
1
C
N
_
. (8.2.11)
We see that F
e
consists of two parts. One part varies with the airspeed, while the other part does not.
By the way, the coecients C
h0
and C
h
are given by
C
h0
=
C
h
C
m
C
mac
C
h
C
N
h
C
N
h
free
(
0
+i
h
) +C
h
te
, (8.2.12)
C
h
=
C
h
C
m
C
m
free
=
C
h
C
m
C
N
x
cg
x
n
free
c
. (8.2.13)
We see that C
h0
depends on
te
. To simplify our equation, we can apply a small trick. We dene
te
0
to
be the value of
te
for which C
h0
= 0. It follows that
te
0
=
1
C
h
t
_
C
h
C
m
C
mac
+
C
h
C
N
h
C
N
h
free
(
0
+i
h
)
_
. (8.2.14)
We can now rewrite the stick deection force as
F
e
=
d
e
ds
e
S
e
c
e
_
V
h
V
_
2
_
W
S
C
h
C
m
e
x
cg
x
n
free
c
1
2
V
2
C
h
t
_
te
te
0
_
_
. (8.2.15)
The control forces, which the pilots need to exert, greatly determine how easy and comfortable it is to
y an airplane. The above equation is therefore rather important.
We can also derive something else from the above equation. Lets dene the trim speed V
tr
to be the
speed at which F
e
= 0. We now examine the derivative dF
e
/dV at this trim speed. (So at F
e
= 0.) If
it is positive (dF
e
/dV > 0), then the aircraft is said to have elevator control force stability in the
current ight condition. It can be shown that this derivative is given by
_
dF
e
dV
_
Fe=0
= 2
d
e
ds
e
S
e
c
e
_
V
h
V
tr
_
2
W
S
C
h
C
m
e
x
cg
x
n
free
c
1
V
tr
. (8.2.16)
Its the job of the designer to keep this derivative positive.
38
8.3 Longitudinal control
8.3.1 Special manoeuvres
Previously, we have only considered steady ight. Now we suppose that we are performing some special
manoeuvre. We will consider both a steady pull-up manoeuvre and a horizontal steady turn.
During these manoeuvres, we will have a certain load factor n = N/W. There are two parameters that
are important for the manoeuvres. They are the elevator deection per g, denoted by d
e
/dn, and
the stick force per g, denoted by dF
e
/dn. Both these parameters should be negative. And they may
not be too high or too low either.
8.3.2 The elevator deection per g
We will now nd an expression for d
e
/dn. Lets suppose were initially in a horizontal steady ight. But
after a brief moment, well be in one of the special manoeuvres. In this brief moment, several aircraft
parameters have changed.
Lets examine the change in normal force C
N
and the change in moment C
m
. The change in normal
force is eected by the angle of attack and the pitch rate q. This gives us
C
N
=
N
1
2
V
2
S
=
W
1
2
V
2
S
n = C
N
C
Zq
q c
V
. (8.3.1)
Similarly, the change in moment is eected by the angle of attack , the pitch rate q and the elevator
deection
e
. This gives us
C
m
= 0 = C
m
+C
mq
q c
V
+C
m
e
e
. (8.3.2)
You may wonder, why is C
m
= 0? This is because both in the initial situation and the nal situation,
we have a steady manoeuvre. There is thus no angular acceleration present. The moment must thus stay
constant.
From the rst of the above two equations, we can nd the derivative of with respect to n. It is given
by
d
dn
=
1
C
N
W
1
2
V
2
S
+
C
Zq
C
N
d
q c
V
dn
. (8.3.3)
From the second of these equations, we can nd that
d
e
dn
=
1
C
m
e
_
C
m
d
dn
+C
mq
d
q c
V
dn
_
. (8.3.4)
Inserting the value of d/dn will eventually give us
d
e
dn
=
1
C
m
e
_
C
m
C
N
W
1
2
V
2
S
+
_
C
m
C
Zq
C
N
+C
mq
_
d
q c
V
dn
_
. (8.3.5)
We will determine the term d
q c
V
/dn later, since it depends on the type of manoeuvre that is being
performed.
8.3.3 The stick force per g
Its time to nd an expression for dF
e
/dn. From equation (8.2.10), we can derive that
dF
e
dn
=
d
e
ds
e
1
2
V
2
h
S
e
c
e
_
C
h
d
h
dn
+C
h
d
e
dn
_
. (8.3.6)
39
We already have an expression for d
e
/dn. The expression for
h
is a bit tricky. This is because we also
have a rotation q. If we take this into account, we will have
h
= (
0
)
_
1
d
d
_
+ (
0
+i
h
) +
l
h
c
q c
V
. (8.3.7)
The derivative of
h
, with respect to n, will then be
d
h
dn
=
_
1
d
d
_
d
dn
+
l
h
c
d
q c
V
dn
. (8.3.8)
Luckily, we still remember d/dn from equation (8.3.3). From this, we can derive an equation thats way
too long to write down here. However, once we examine specic manoeuvres, we will mention the nal
equation.
8.3.4 The pull-up manoeuvre
Lets consider an aircraft in a pull-up manoeuvre. When an aircraft pulls its nose up, the pilot will
experience higher g-forces. This will thus cause the load factor n to change.
To be able to study pull-up manoeuvres, we simplify them. We assume that both n and V are constant.
If this is the case, the aircrafts path will form a part of a circle. The centripetal accelaration thus is
N W = mV q. By using n = N/W and W = mg, we can rewrite this as
q c
V
=
g c
V
2
(n 1). (8.3.9)
Dierentiating with respect to n gives
d
q c
V
dn
=
g c
V
2
=
1
2
c
W
1
2
V
2
S
, where
c
=
m
S c
=
W
gS c
. (8.3.10)
By using this, we can nd the elevator deection per g for a pull-up manoeuvre. It is
d
e
dn
=
1
C
m
e
W
1
2
V
2
S
_
C
m
C
N
_
1 +
C
Zq
2
c
_
+
C
mq
2
c
_
. (8.3.11)
Often the term C
Zq
/2
c
can be neglected. This simplies matters a bit. We can also derive a new
expression for the stick force per g. We will nd that
dF
e
dn
=
d
e
ds
e
W
S
_
V
h
V
_
2
S
e
c
e
C
h
C
m
e
_
C
m
free
C
N
+
C
mq
free
2
c
_
. (8.3.12)
In this equation, we can see the parameters C
m
free
and C
mq
free
. These are the values of C
m
and C
mq
when the pilot releases his stick. They are given by
C
m
free
= C
Nw
x
cg
x
w
c
+C
m
h
free
and C
mq
free
= C
mq
C
m
e
C
h
C
N
l
h
c
. (8.3.13)
(The relation for C
m
h
free
was already given in equation (8.2.5).)
8.3.5 The steady horizontal turn
Now lets consider an aircraft in a steady horizontal turn. It is performing this turn with a constant roll
angle . From this, we can derive that
N cos = W and N W cos = mV q. (8.3.14)
40
If we combine the above relations, and rewrite them, we will get
q c
V
=
g c
V
2
_
n
1
n
_
. (8.3.15)
Dierentiating with respect to n will then give us
d
q c
V
dn
=
1
2
c
W
1
2
V
2
S
_
1 +
1
n
2
_
. (8.3.16)
By using this, we can nd the elevator deection per g for a horizontal steady turn. It is
d
e
dn
=
1
C
m
e
W
1
2
V
2
S
_
C
m
C
N
+
_
C
m
C
N
C
Zq
2
c
+
C
mq
2
c
__
1 +
1
n
2
__
. (8.3.17)
Again, we may often assume that C
Zq
/2
c
0. This again simplies the equation. We also have the
stick force per g. In this case, it is given by
dF
e
dn
=
d
e
ds
e
W
S
_
V
h
V
_
2
S
e
c
e
C
h
C
m
e
_
C
m
free
C
N
+
C
mq
free
2
c
_
1 +
1
n
2
_
_
. (8.3.18)
It is interesting to see the similarities between the pull-up manoeuvre and the steady horizontal turn. In
fact, if the load factor n becomes big, the dierence between the two manoeuvres disappears.
8.3.6 The manoeuvre point
An important point on the aircraft, when performing manoeuvres, is the manoeuvre point. It is dened
as the position of the CG for which d
e
/dn = 0. First we will examine the stick xed manoeuvre
point x
m
fix
. To have d
e
/dn = 0 for a pull-up manoeuvre (neglecting C
Zq
/2
c
), we should have
C
m
C
N
+
C
mq
2
c
=
x
cg
x
n
fix
c
+
C
mq
2
c
= 0. (8.3.19)
If the above equation holds, then the CG equals the manoeuvre point. We thus have
x
m
fix
x
n
fix
c
=
C
mq
2
c
and also
x
cg
x
m
fix
c
=
C
m
C
N
+
C
mq
2
c
. (8.3.20)
(Remember that the above equations are for the pull-up manoeuvre. For the steady turn, we need to
multiply the term with C
mq
by an additional factor
_
1 + 1/n
2
_
.) By using the above results, we can
eventually obtain that
d
e
dn
=
1
C
m
e
W
1
2
V
2
S
x
cg
x
m
fix
c
. (8.3.21)
By the way, this last equation is valid for both the pull-up manoeuvre and the steady horizontal turn.
We can also nd the stick free manoeuvre point x
m
free
. This goes, in fact, in a rather similar way.
We will thus also nd, for the pull-up manoeuvre, that
x
m
free
x
n
free
c
=
C
mq
free
2
c
and
x
cg
x
m
free
c
=
C
m
free
C
N
+
C
mq
free
2
c
. (8.3.22)
(For the steady turn, we again need to multiply the term with C
mq
free
by
_
1 + 1/n
2
_
.)
41
9. Lateral stability and control
In this chapter, we will examine lateral stability and control. How should we control an aircraft in a
non-symmetrical steady ight?
9.1 The equations of motion
9.1.1 Derivation of the equations of motion for asymmetric ight
Lets examine an aircraft in a steady asymmetric ight. It has a roll angle and a sideslip angle . By
examining equilibrium, we can nd that
W sin +Y = mV r, L = 0 and N = 0. (9.1.1)
Non-dimensionalizing these equations gives
C
L
4
b
rb
2V
+C
Y
= 0, C
l
= 0 and C
n
= 0, (9.1.2)
where we have
b
=
m
Sb
. We can also apply linearization to the above equations. This will then give us
C
L
+C
Y
+ (C
Yr
4
b
)
rb
2V
+C
Y
a
a
+C
Y
r
r
= 0, (9.1.3)
C
l
+C
lr
rb
2V
+C
l
a
a
+C
l
r
r
= 0, (9.1.4)
C
n
+C
nr
rb
2V
+C
n
a
a
+C
n
r
r
= 0. (9.1.5)
9.1.2 Simplifying the equations of motion
Lets examine the equations of the previous paragraph. There are quite some terms in these equations
that are negligible. They are C
Y
a
, C
l
r
, C
Yr
, C
n
a
and C
Y
r
. By using these neglections, and by putting
the above equations into matrix form, we will get
_
_
C
L
C
Y
4
b
0 0
0 C
l
C
lr
C
l
a
0
0 C
n
C
nr
0 C
n
r
_
_
_
rb
2V
r
_
_
=
_
_
0
0
0
_
_. (9.1.6)
Lets assume that the velocity V is already set. We then still have ve unknowns and three equations.
That means that there are innitely many solutions. This makes sense: You can make a turn in innitely
many ways. How do we deal with this? We simply set one of the parameters. We then express three of
the remaining parameters as a function of the last parameter. (This fth parameter is usually
rb
2V
.) So
lets do that.
9.2 Steady horizontal turns
9.2.1 Turns using ailerons only
Lets try to turn the aircraft, by only using ailerons. We do not use the rudder and thus have
r
= 0.
We can insert this into the equations of motion. We then solve for the parameters , and
a
. This will
42
give us
d
d
rb
2V
=
C
nr
C
n
> 0 (since C
nr
< 0 and C
n
> 0), (9.2.1)
d
d
rb
2V
=
4
b
+C
Y
Cnr
Cn
C
L
> 0, (9.2.2)
d
a
d
rb
2V
=
1
C
l
a
C
l
C
nr
C
lr
C
n
C
n
. (9.2.3)
The sign of the last equation is still a point of discussion. We would like to have d
a
/d
rb
2V
. If this is the
case, then we have so-called spiral stability. We know that C
l
a
< 0 and C
n
> 0. So spiral stability
is achieved if
C
l
C
nr
C
lr
C
n
> 0. (9.2.4)
We will nd out in the next chapter why they call this the spiral stability condition.
9.2.2 Turns using the rudder only
We can also make a turn using only the rudder. So we have
a
= 0. This again gives us three equations,
being
d
d
rb
2V
=
C
lr
C
l
> 0 (since C
lr
> 0 and C
l
< 0), (9.2.5)
d
d
rb
2V
=
4
b
+C
Y
C
lr
C
l
C
L
> 0, (9.2.6)
d
r
d
rb
2V
=
1
C
n
r
C
l
C
nr
C
lr
C
n
C
l
. (9.2.7)
In the last equation, we have C
n
r
< 0 and C
l
< 0. If there is also spiral stability, then we have
d
r
/d
rb
2V
< 0.
9.2.3 Coordinated turns
In a coordinated turn, we have = 0. This means that there is no sideward component of the force
acting on the aircraft. This is an important factor for passenger comfort. For the coordinated turn, we
again have three equations. They are
d
d
rb
2V
=
4
b
C
L
> 0, (9.2.8)
d
a
d
rb
2V
=
C
lr
C
l
a
> 0 (since C
lr
> 0 and C
l
a
< 0), (9.2.9)
d
r
d
rb
2V
=
C
nr
C
n
r
< 0 (since C
nr
< 0 and C
n
r
< 0). (9.2.10)
43
9.2.4 Flat turns
If we want the aircraft to stay at during the turns, then we have = 0. It then follows that
d
d
rb
2V
=
4
b
C
Y
< 0. (9.2.11)
From this, we can also derive that
d
a
d
rb
2V
> 0 and
d
r
d
rb
2V
< 0. (9.2.12)
9.3 Other ight types
9.3.1 Steady straight sideslipping ight
Lets examine a steady straight sideslipping ight. This type of ight is usually only used during landings
with strong sidewinds. However, sometimes the aircraft is brought into a steady straight sideslipping ight
involuntarily. It is therefore important to know how the aircraft behaves.
In a straight ight, we have
rb
2V
= 0. We can now derive that
d
d
=
C
Y
C
L
> 0,
d
a
d
=
C
l
C
l
a
and
d
r
d
=
C
n
C
n
r
. (9.3.1)
We generally want to have d
a
/d < 0 and d
r
/d > 0. We also always have C
l
a
< 0 and C
n
r
< 0.
This implies that we should have C
l
< 0 and C
n
> 0.
9.3.2 Stationary ight with asymmetric power
Lets suppose one of the engines of the aircraft doesnt work anymore. In this case, a yawing moment
will be present. This moment has magnitude
C
ne
= k
T
p
y
e
1
2
V
2
Sb
. (9.3.2)
The variable T
p
consists of two parts. First there is the reduction in thrust. Then there is also the
increase in drag of the malfunctioning engine. y
e
is the Y coordinate of the malfunctioning engine.
Finally, k is an additional parameter, taking into account other eects. Its value is usually between 1.5
and 2.
Now lets try to nd a way in which we can still perform a steady straight ight. (We should thus have
r = 0.) We now have four unknowns and three equations. So we can still set one parameter. Usually,
we would like to have = 0 as well. In this case, a sideslip angle is unavoidable. If the right engine is
inoperable, then a positive rudder deection and sideslip angle will be present.
We could also choose to have = 0. In this case, we will constantly y with a roll angle . The wing
with the inoperable engine then has to be lower than the other wing. So if the right wing malfunctions,
then we have a positive roll angle.
44
10. Aircraft modes of vibration
It is nally time to look at the dynamics of an aircraft. How will an aircraft behave, when given elevator,
rudder and aileron deections? What are its modes of vibration? Thats what we will look at in this
chapter.
10.1 Eigenvalue theory
10.1.1 Solving the system of equations
To examine the dynamic stability of the aircraft, we examine the full longitudinal equations of motion.
The symmetric part of these equations were
_
_
C
Xu
2
c
D
c
C
X
C
Z0
C
Xq
C
Zu
C
Z
+ (C
Z
2
c
)D
c
C
X0
2
c
+C
Zq
0 0 D
c
1
C
mu
C
m
+C
m
D
c
0 C
mq
2
c
K
2
Y
D
c
_
_
_
_
u
q c
V
_
_
=
_
_
0
0
0
0
_
_
. (10.1.1)
In this system of equations, we have assumed stick-xed conditions. All inputs are zero. We could try
to nd solutions for the above system of equations. A common way to do this, is to assume a solution of
the form
x(t) = Ae
csc
. (10.1.2)
In this equation, x(t) is our solution. s
c
=
V
c
t is the dimensionless time. From this form follows that
D
c
x =
c
x. If we insert this into the equations of motion, we nd
_
_
C
Xu
2
c
c
C
X
C
Z0
C
Xq
C
Zu
C
Z
+ (C
Z
2
c
)
c
C
X0
2
c
+C
Zq
0 0
c
1
C
mu
C
m
+C
m
c
0 C
mq
2
c
K
2
Y
c
_
_
_
_
A
u
A
A
q
_
_
e
csc
=
_
_
0
0
0
0
_
_
. (10.1.3)
We can write this matrix equation as [] Ae
csc
= 0. The exponential in this equation cant be zero, so
we can get rid of it. We thus need to solve [] A = 0. One solution of this equation is A = 0. However,
this is a rather trivial solution, in which we are not interested. So we need to nd non-trivial solutions.
This is where our knowledge on linear algebra comes in. There can only be non-trivial solutions, if
det [] = 0. Applying this will give us an equation of the form
A
4
c
+B
3
c
+C
2
c
+D
c
+E = 0. (10.1.4)
This equation is called the characteristic polynomial. Solving it will give four eigenvalues
c1
,
c2
,
c3
and
c4
. Corresponding to these four eigenvalues are four eigenvectors A
1
, A
2
, A
3
and A
4
. The
nal solution of the system of equations now is
x = c
1
A
1
e
c
1
sc
+c
2
A
2
e
c
2
sc
+c
3
A
3
e
c
3
sc
+c
4
A
4
e
c
4
sc
. (10.1.5)
The constants c
1
, c
2
, c
3
and c
4
depend on the four initial conditions.
10.1.2 The eigenvalues
Lets examine the eigenvalues of the system of equations. Each eigenvalue can be either real and complex.
If one of the eigenvalues is complex, then its complex conjugate is also an eigenvalue. Complex eigenvalues
therefore always come in pairs.
45
A mode of vibration is a characteristic way in which an object (our aircraft) can vibrate. The number
of modes depends on the eigenvalues. In fact, it is equal to the number of dierent eigenvalues. (When
performing the counting, a pair of complex conjugate eigenvalues is counted as one.) For example, an
aircraft with two real eigenvalues and two complex eigenvalues has three modes of vibration.
The eigenvalues
c
are very important for the stability of the system. To examine stability, we look at
the limit
lim
sc
c
1
A
1
e
c
1
sc
+c
2
A
2
e
c
2
sc
+c
3
A
3
e
c
3
sc
+c
4
A
4
e
c
4
sc
. (10.1.6)
If only one of the eigenvalues has a positive real part, then this limit will diverge. This means that our
aircraft is unstable. If, however, all eigenvalues have negative real parts, then the system is stable.
10.1.3 Real eigenvalue properties
We can derive some interesting properties from the eigenvalues. First, lets examine a real eigenvalue
c
. This eigenvalue has its own mode of vibration x = Ae
csc
. The half time T1
2
is dened as the
time it takes to reduce the amplitude of the motion to half of its former magnitude. In other words,
x(t +T1
2
) =
1
2
x(t). Solving this equation will give
T1
2
=
ln
1
2
c
c
V
. (10.1.7)
Similarly, we dene the time constant as the time it takes for the amplitude to become 1/e of its former
magnitude. Solving x(t +) =
1
e
x(t) gives
=
1
c
c
V
. (10.1.8)
These two parameters of course only exist if
c
is negative. If it is positive, then the magnitude will only
grow. In this case, the doubling time T
2
is an important parameter. It is given by T
2
= T1
2
.
10.1.4 Complex eigenvalue properties
Now lets examine a complex eigenvalue pair. We can write it as
c1,2
=
c
c
i, where i =
1 is the
complex number. This eigenvalue will cause an oscillation. The period and frequency of the oscillation
only depend on
c
. In fact, the period P, the frequency f and the angular frequency
n
are given
by
P =
2
c
c
V
, f =
1
P
=
c
2
V
c
and
n
=
2
P
=
c
V
c
. (10.1.9)
The damping of this oscillation is caused by the real part
c
. Again, the half time T1
2
is dened as the
time it takes for the amplitude to reduce to half its size. It is still given by
T1
2
=
ln
1
2
c
c
V
. (10.1.10)
Another important parameter is the logarithmic decrement . It is dened as the natural logarithm
of the ratio of the magnitude of two successive peaks. In other words, it is dened as
= ln
_
e
c
V
c
(t+P)
e
c
V
c
t
_
=
c
V
c
P. (10.1.11)
Finally, there are the damping ratio and the undamped angular frequency
0
. They are dened
such that
c1,2
=
_
0
i
0
_
1
2
_
c
V
. (10.1.12)
46
Solving for and
0
will give
=
c
_
2
c
+
2
c
and
0
=
_
2
c
+
2
c
V
c
. (10.1.13)
10.1.5 Getting stable eigenvalues
Lets take a look at the characteristic equation (equation (10.1.4)). We usually set up the equation, such
that A > 0. To obtain four eigenvalues with negative real parts, we must have
B > 0, C > 0, D > 0 and E > 0. (10.1.14)
But these arent the only conditions to ensure that we have stable eigenvalues. We must also have
R = BCD AD
2
B
2
E > 0. (10.1.15)
These criteria are known as the Routh-Hurwitz Stability Criteria. The coecient R is called
Rouths discriminant. These criteria hold for both the symmetric and the asymmetric modes of
vibration.
10.2 The symmetric modes of vibration
10.2.1 Example eigenvalues
Lets suppose we know all the parameters in the matrix equation that was described earlier. In this case,
we can nd the four eigenvalues. An example solution of these eigenvalues is given by
c1,2
= 0.04 0.04i and
c3,4
= 0.0003 0.006i. (10.2.1)
Of course these values will be dierent for dierent aircraft. But most types of aircraft, having the
standard wing-fuselage-tailplane set-up, will have similar eigenvalues.
Lets study these eigenvalues. There are two pairs of complex conjugate eigenvalues. Both pairs of
eigenvalues have negative real parts. This means that the aircraft is stable. Since there are only two
pairs of complex conjugate eigenvalues, there are two modes of vibration. We will now examine these
modes.
10.2.2 The short period oscillation
Lets look at the rst pair of eigenvalues. It has a relatively big real part
c
The damping is therefore
big. The complex part
c
is relatively big as well. So the frequency is high. In other words, we have a
highly damped high-frequency oscillation. This motion is known as the short period oscillation.
Lets take a look at what actually happens in the aircraft. We start the short period oscillation by
applying a step input to the elevator deection. (We deect it, and keep that deection.) We can, for
example, deect it upward. This causes the lift on the horizontal tailplane to decrease. This, in turn,
causes the pitch rate to increase. An increase in pitch rate will, however, increase the eective angle of
attack of the horizontal tailplane. This then reduces the pitch rate. And the whole cycle starts over again.
However, the oscillation is highly damped. After less than one period, the eects are hardly noticable
anymore.
Now lets try to derive some equations for the short period motion. The short period motion is rather
fast. So we assume the aircraft hasnt had time yet to change its velocity in X or Z direction. This
47
means that u = 0 and = 0. Therefore = . This reduces the equations of motion to
_
C
Z
+ (C
Z
2
c
)
c
2
c
+C
Zq
C
m
+C
m
c
C
mq
2
c
K
2
Y
c
__
q c
V
_
=
_
0
0
_
. (10.2.2)
We can now nd the eigenvalues for this matrix. This will still give us a rather complicated equation. If
we neglect C
Z
and C
Zq
, then this complicated equation reduces to
c1,2
=
B i
4AC B
2
2A
. (10.2.3)
In this equation, the coecients A, B and C are given by
A = 4
2
c
K
2
Y
, B = 2
c
(K
2
Y
C
Z
+C
m
+C
mq
) and C = C
Z
C
mq
2
c
C
m
. (10.2.4)
To have stability, we should have
B
2A
negative. We know that A is positive. This means that B has to
be positive as well.
10.2.3 The phugoid
Now we look at the second pair of eigenvalues. It has a small real part
c
, and therefore a small damping.
The complex part
c
is small as well, so the frequency is low. In other words, we have a lightly damped
low-frequency oscillation. This motion is known as the phugoid.
Again, we look at what happens with the aircraft. This time, we apply an impulse deection on the
elevator. (We only deect it briey.) This will cause our pitch angle to increase. (That is, after the short
period motion has more or less damped out.) We will therefore go upward. This causes our velocity to
decrease. Because of this, the lift is reduced. Slowly, the pitch angle will decrease again, and we will go
downward. This causes the velocity to increase. This, in turn, increases the lift. The pitch angle will
again increase, and we will again go upward.
Again, we will try to derive some relations for the phugoid. In the phugoid, the angle of attack is
approximately constant. ( and do vary a lot though.) So we have = 0 and = 0. (Remember that
were discussing deviations from the initial position.) Since the oscillation is very slow, we also assume
that q = 0. If we also neglect the terms C
Zq
and C
X0
, we will nd that we again have
c3,4
=
B i
4AC B
2
2A
. (10.2.5)
However, now the coecients are given by
A = 4
2
c
, B = 2
c
C
Xu
and C = C
Zu
C
Z0
. (10.2.6)
We can apply the approximations C
Xu
= 2C
D
, C
Z0
= C
L
and C
Zu
= 2C
L
. This would then give
us the three parameters
0
=
V
c
C
2
L
2
2
c
=
g
V
2, =
2
2
C
D
C
L
and P =
2
0
_
1
2
0
=
2
V
g
. (10.2.7)
Note that, in the above equation for P, we have used the fact that the damping is small. Although the
above equations are only approximations, they can serve as quite handy tools in verifying your results.
48
10.3 The asymmetric modes of vibration
10.3.1 Example eigenvalues
We have just examined the symmetric equations of motion. Of course, we can do the same for the
asymmetric equations of motion. These equations of motion are
_
_
C
Y
+ (C
Y
2
b
)D
b
C
L
C
Yp
C
Yr
4
b
0
1
2
D
b
1 0
C
l
0 C
lp
4
b
K
2
X
D
b
C
lr
+ 4
b
K
XZ
D
b
C
n
+C
n
D
b
0 C
np
+ 4
b
K
XZ
D
b
C
nr
4
b
K
2
Z
D
b
_
_
_
pb
2V
rb
2V
_
_
=
_
_
0
0
0
0
_
_
. (10.3.1)
Examining them goes in more or less the same way as for the symmetric case. There is, however, one
important dierence. Since we are examining the asymmetric case, we dont use the chord c but we use
the wing span b. The eigenvalues are thus also denoted as
b
. Example eigenvalues for an aircraft are
b1
= 0.4,
b2
= 0.01 and
b3,4
= 0.04 0.4i. (10.3.2)
You might be surprised that these eigenvalues are a lot bigger than the symmetric eigenvalues. This is
not very important. Its only the case, because they are based on b, instead of on c. And naturally, b is
a lot bigger than c.
Lets examine the eigenvalues. There are two real eigenvalues and one pair of complex conjugate eigenval-
ues. The aircraft thus has three modes of vibration. You might also have noticed that there is a positive
eigenvalue. The aircraft is thus unstable. The eigenvalue is, however, very small. This means that the
aircraft state will only diverge very slowly. The pilot will have plenty of time to do something about it.
So you dont have to worry: ying is still safe.
10.3.2 The aperiodic roll
The motion corresponding to
b1
is called the aperiodic roll. The eigenvalue is very negative. This
motion is therefore highly damped.
The aperiodic roll is induced by applying a step input to the aileron. When this happens, the aircraft
will start rolling. Lets suppose it rolls to the right. The right wing then goes down. This means that the
right wing will get a higher eective angle of attack. The lift of this wing thus increases. The opposite
happens for the left wing: its lift decreases. This lift dierence causes a moment opposite to the rolling
motion. In other words, the motion is damped out. The roll rate p will converge rather quickly to a
constant value.
The aperiodic roll is a very fast motion. So there is no time for sideslip or yaw eects to appear. So
we can assume that, during an aperiodic roll motion, we have = r = 0. This reduces the equations of
motion to just one equation, being
_
C
lp
4
b
K
2
X
D
b
_
pb
2V
= 0. (10.3.3)
It directly follows that the corresponding eigenvalue is given by
b1
=
C
lp
4
b
K
2
X
. (10.3.4)
10.3.3 The spiral motion
The motion corresponding to
b2
is called the spiral motion. The eigenvalue is positive. So the motion
is unstable. However, the eigenvalue is very small. This means that divergence will occur only very
49
slowly. We thus say that the motion is marginally unstable. (For some aircraft, this value is slightly
negative. Such aircraft are marginally stable.)
The spiral motion is induced by an initial roll angle. (An angle of 10
is sucient.) This causes the lift
vector to be tilted. The horizontal component of the lift will cause the aircraft to make a turn. In the
meanwhile, the vertical component of the lift vector has slightly decreased. This causes the aircraft to
lose altitude. Combining these two facts will mean that the aircraft will perform a spiral motion.
If the eigenvalue
b2
is positive, then the roll angle of the aircraft will slowly increase. The spiral motion
will therefore get worse. After a couple of minutes, the roll angle might have increased to 50
. This
phenomenon is, however, not dangerous. The pilot will have plenty of time to react. It is also very easy
to pull the aircraft out of a spiral motion.
Lets try to derive an equation for
b2
. The spiral motion is a very slow motion. We thus neglect the
derivatives of , p and r. Also, the coecients C
Yr
and C
Yp
are neglected. After working out some
equations, we can eventually nd that
b2
=
2C
L
_
C
l
C
nr
C
n
C
lr
_
C
lp
_
C
Y
C
nr
+ 4
b
C
n
_
C
np
_
C
Y
C
lr
+ 4
b
C
l
_. (10.3.5)
The denominator of this relation is usually negative. We say we have spiral stability if
b2
< 0. This
is thus the case if
C
l
C
nr
C
n
C
lr
> 0. (10.3.6)
You might remember that weve seen this equation before.
10.3.4 The Dutch roll
The pair of eigenvalues
b3,4
has a slightly low damping and a slightly high frequency. In the mode of
vibration corresponding to these eigenvalues, the aircraft alternately performs a yawing and a rolling
motion. The mode of vibration is called the Dutch roll.
Lets take a look at what actually happens with the aircraft. To initiate the Dutch roll, an impulse input
is applied to the rudder. This causes the aircraft to yaw. Lets suppose the aircraft yaws to the right.
The lift on the left wing then increases, while the lift on the right wing decreases. This moment causes
the aircraft to roll to the right.
When the aircraft is rolling to the right, then the lift vector of the right wing is tilted forward. Similarly,
the left wing will have a lift vector that is tilted backward. This causes the aircraft to yaw to the left.
(This eect is still called adverse yaw.) In this way, roll and yaw alternate each other. It is important to
remember that roll and yaw are alternately present. When the roll rate is at a maximum, the yaw rate
is approximately zero, and vice verse.
The Dutch roll is not very comfortable for passenger. To increase passenger comfort, a yaw damper is
used. This is an automatic system, which uses rudder/aileron deections to reduce the eects of the
Dutch roll.
Lets try to nd a relation for
b3,4
. This is rather hard, since both roll and yaw are present. However,
experience has shown that we still get slightly accurate results, if we neglect the rolling part of the motion.
We thus assume that = p = 0. This reduces the system of equations to a 2 2 matrix. From it, we
can again nd that
b3,4
=
B i
4AC B
2
2A
. (10.3.7)
However, this time the coecients A, B and C are given by
A = 8
2
b
K
2
Z
, B = 2
b
_
C
nr
+ 2K
2
Z
C
Y
_
and C = 4
b
C
n
+C
Y
C
nr
. (10.3.8)
And that concludes our discussion on the modes of vibration.
50
10.3.5 Stability criteria
From the characteristic equation (equarion (10.1.4)) we can see which eigenmotions are stable. We have
seen earlier that, if A, B, C, D, E and R are all positive, then all eigenmotions are stable. In other
words, we have spiral stability and a convergent Dutch roll.
However, if some of the coecients become negative, then there will be unstable eigenmotions. If E < 0,
then we have spiral instability. Similarly, if R < 0, then we will have a divergent Dutch roll. So, to ensure
stability, wed best keep the coecient of the characteristic equation positive.
51
Anda mungkin juga menyukai
- Master Thesis: Tomas Melin. Royal Institute of Technology (KTH) - Department of Aeronautics. December 2000Dokumen45 halamanMaster Thesis: Tomas Melin. Royal Institute of Technology (KTH) - Department of Aeronautics. December 2000Huỳnh KhiêmBelum ada peringkat
- AST Composite Wing ProgrammeDokumen98 halamanAST Composite Wing Programmeismailovic2Belum ada peringkat
- Basic Aircraft InstrumentsDokumen4 halamanBasic Aircraft InstrumentsOWAISBelum ada peringkat
- Tso C139Dokumen5 halamanTso C139Russell GouldenBelum ada peringkat
- Bleeding Your Cherokee BrakesDokumen4 halamanBleeding Your Cherokee BrakesBlueSkyMasterBelum ada peringkat
- ATPL Inst 3.1 PDFDokumen10 halamanATPL Inst 3.1 PDFKoustubh VadalkarBelum ada peringkat
- 4 5882210956028675959 PDFDokumen378 halaman4 5882210956028675959 PDFriyadh alsallalBelum ada peringkat
- 2 - Propeller Thrust and Drag in Forward FlightDokumen7 halaman2 - Propeller Thrust and Drag in Forward FlightMarko PoloBelum ada peringkat
- AC 20-192 Draft Non-Rechargeable Lithium BatteriesDokumen46 halamanAC 20-192 Draft Non-Rechargeable Lithium BatteriesK COXBelum ada peringkat
- Report GliderDokumen29 halamanReport GliderAmirul Haqim Mohd JoraBelum ada peringkat
- AeroBasics PDFDokumen44 halamanAeroBasics PDFShirat MohsinBelum ada peringkat
- Turbulence Training Video ScriptDokumen294 halamanTurbulence Training Video ScriptJ'boy Jacob100% (1)
- Navigation Systems - Approach: Nolan, Chap 2Dokumen32 halamanNavigation Systems - Approach: Nolan, Chap 2giant360Belum ada peringkat
- Helicopter PPT 1Dokumen18 halamanHelicopter PPT 1Sunil PanwarBelum ada peringkat
- Torenbeek Optimum Cruise Performance of Subsonic Transport AircraftDokumen80 halamanTorenbeek Optimum Cruise Performance of Subsonic Transport Aircraftomga747Belum ada peringkat
- The Artificial HorizonDokumen18 halamanThe Artificial HorizonSherįl AlexxBelum ada peringkat
- EAA - EAA Experimenter - A Tool For Understanding Power, Drag, and Prop Design PDFDokumen4 halamanEAA - EAA Experimenter - A Tool For Understanding Power, Drag, and Prop Design PDFdjaverBelum ada peringkat
- Flutter ExcitationDokumen25 halamanFlutter ExcitationLeonardo ContrerasBelum ada peringkat
- Neral Capítulo.1 PDFDokumen8 halamanNeral Capítulo.1 PDFemhidalgoBelum ada peringkat
- Drag Reduction in An AirplaneDokumen14 halamanDrag Reduction in An AirplaneDhruvBelum ada peringkat
- Swept Wings and Effective Dihedral ExplainedDokumen22 halamanSwept Wings and Effective Dihedral ExplainedAngel Villalonga MoralesBelum ada peringkat
- General Weight and BalanceDokumen30 halamanGeneral Weight and Balancehansen majayaBelum ada peringkat
- 5 Asymmetric Flight PDFDokumen11 halaman5 Asymmetric Flight PDFAvinash KumarBelum ada peringkat
- Introduction To FlightDokumen38 halamanIntroduction To FlightDavid John BalanagBelum ada peringkat
- AErodynakicDokumen5 halamanAErodynakickannarockBelum ada peringkat
- USAF Stability and Control Digital Datcom Users ManualDokumen313 halamanUSAF Stability and Control Digital Datcom Users ManualFabian ZenderBelum ada peringkat
- Sample Question paper and hints for solutionDokumen20 halamanSample Question paper and hints for solutionDhinakaran VeemanBelum ada peringkat
- Propeller Design Workshop Part IDokumen92 halamanPropeller Design Workshop Part IJasoos ParrierBelum ada peringkat
- Module 8 SubjectsDokumen2 halamanModule 8 Subjectsaeroengineer1Belum ada peringkat
- Mod 11 01-10-09 ExtrasDokumen591 halamanMod 11 01-10-09 ExtrassebastienBelum ada peringkat
- $MP 015 25Dokumen12 halaman$MP 015 25Mohammad Sli100% (1)
- Flutter TestingDokumen16 halamanFlutter TestingMarius Olenici100% (2)
- Aircraft LoadsDokumen9 halamanAircraft LoadsbpraveenaeroBelum ada peringkat
- Design ND Optimization Using CFDDokumen29 halamanDesign ND Optimization Using CFDKrishna TejaBelum ada peringkat
- Classroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DDokumen21 halamanClassroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DAerocse EceitmechBelum ada peringkat
- TP876E - Study & Ref Guide Glider PilotDokumen20 halamanTP876E - Study & Ref Guide Glider PilotbahbahaBelum ada peringkat
- Cockpit ControlsDokumen2 halamanCockpit ControlsLoc Das NeyfusBelum ada peringkat
- High Speed FlightDokumen3 halamanHigh Speed Flightmamaadam02Belum ada peringkat
- Pitch StabilityDokumen6 halamanPitch StabilityAirPlaneTrainMobileBelum ada peringkat
- Electric Propeller Aircraft SizingDokumen35 halamanElectric Propeller Aircraft SizingZenon CortezBelum ada peringkat
- Flutter and Directional Stability of AircraftDokumen12 halamanFlutter and Directional Stability of AircraftdaliadavidkBelum ada peringkat
- Turns Around A Point LessonDokumen4 halamanTurns Around A Point LessonMike AguirreBelum ada peringkat
- Study of Preliminary Configuration Design of F-35 using simple CFDDokumen13 halamanStudy of Preliminary Configuration Design of F-35 using simple CFDMithun Ravichandran100% (1)
- Wind Tunnel Pope PDFDokumen20 halamanWind Tunnel Pope PDFKrmxl Tdre100% (1)
- Four Forces in FlightDokumen44 halamanFour Forces in FlightHibbaBelum ada peringkat
- Annular Wing CraftDokumen2 halamanAnnular Wing CraftCalvin NgBelum ada peringkat
- Winglet Airfoil Maughmer Et AlDokumen8 halamanWinglet Airfoil Maughmer Et Alzaid100% (1)
- AircraftDokumen202 halamanAircraftJohn Adrian RoceroBelum ada peringkat
- A Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsDari EverandA Much Unsung Hero, The Lunar Landing Training Vehicle: And Other NASA RecollectionsPenilaian: 5 dari 5 bintang5/5 (1)
- Aerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsDari EverandAerospace Actuators 1: Needs, Reliability and Hydraulic Power SolutionsBelum ada peringkat
- Aerospace Actuators 2: Signal-by-Wire and Power-by-WireDari EverandAerospace Actuators 2: Signal-by-Wire and Power-by-WireBelum ada peringkat
- زنجيره تلرانسيDokumen65 halamanزنجيره تلرانسيAmir HouBelum ada peringkat
- Power System Stability Question PaperDokumen8 halamanPower System Stability Question PaperMousa Dhrgham100% (1)
- A I0131e PDFDokumen219 halamanA I0131e PDFTëk AñdotBelum ada peringkat
- Design of spiral resistance heating elementsDokumen6 halamanDesign of spiral resistance heating elementsarg0nautBelum ada peringkat
- HW 5 HTDokumen26 halamanHW 5 HTMelkysedec Sierra SandovalBelum ada peringkat
- Nano-Particle Prepared From Sol-Gel Method: Titanium Tetra-Iso-Propoxide DiethanolamineDokumen21 halamanNano-Particle Prepared From Sol-Gel Method: Titanium Tetra-Iso-Propoxide DiethanolamineMaggyBalcazarBelum ada peringkat
- A Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesDokumen17 halamanA Study of Impurities in Intermediates and 3,4-Methylenedioxymethamphetamine (MDMA) Samples Produced Via Reductive Amination RoutesandonovkaBelum ada peringkat
- X Pol DesignDokumen11 halamanX Pol DesignproudpunkBelum ada peringkat
- The Divine MatrixDokumen3 halamanThe Divine MatrixDeWayne RobertsBelum ada peringkat
- Density and Specific GravityDokumen76 halamanDensity and Specific GravityJireh Ann Mejino50% (2)
- DTC P0771 Shift Solenoid "E" Performance (Shift Solenoid Valve SR)Dokumen5 halamanDTC P0771 Shift Solenoid "E" Performance (Shift Solenoid Valve SR)Marco Antonio RamirezBelum ada peringkat
- Analog CommunicationsDokumen2 halamanAnalog CommunicationsShanks1994Belum ada peringkat
- Sdof 1211798306003307 8Dokumen131 halamanSdof 1211798306003307 8AzTaurRivaiBelum ada peringkat
- The Design and Performance of The Retaining Walls at Newton Station - Nicholson PDFDokumen8 halamanThe Design and Performance of The Retaining Walls at Newton Station - Nicholson PDFsonnykinBelum ada peringkat
- LightDokumen84 halamanLightsenjicsBelum ada peringkat
- Microgrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorDokumen9 halamanMicrogrid Dynamic Performance Improvement Using A Doubly Fed Induction Wind GeneratorDhinesh BaluBelum ada peringkat
- 7.catalysis ProblemsDokumen21 halaman7.catalysis ProblemsvamsiakellaBelum ada peringkat
- Conditiong Monitoring Techniques For Electric Cables Used in Nuclear Power PlantsDokumen16 halamanConditiong Monitoring Techniques For Electric Cables Used in Nuclear Power PlantsGualadrakeBelum ada peringkat
- Understanding The Colour Coding: Kittiwake Viscotube ReadmeDokumen15 halamanUnderstanding The Colour Coding: Kittiwake Viscotube ReadmemusaveerBelum ada peringkat
- Fadum Chart SampleDokumen3 halamanFadum Chart SampleSa'ad Abd Ar RafieBelum ada peringkat
- E 214 - 01 - Rtixna - PDFDokumen3 halamanE 214 - 01 - Rtixna - PDFLeón SuárezBelum ada peringkat
- Module 6 Structure DynamicsDokumen64 halamanModule 6 Structure DynamicswajidBelum ada peringkat
- The Hysteresis Loop and Magnetic PropertiesDokumen2 halamanThe Hysteresis Loop and Magnetic Propertiesgambhir gautamBelum ada peringkat
- Introduction To Ozone DepletionDokumen2 halamanIntroduction To Ozone DepletionJudelynElentorioBelum ada peringkat
- Materials Science and Engineering MIME 260: Laboratory ManualDokumen17 halamanMaterials Science and Engineering MIME 260: Laboratory ManualMarchal LoveBelum ada peringkat
- Bioenergetics of Aquatic AnimalsDokumen182 halamanBioenergetics of Aquatic AnimalsDaniel FernándezBelum ada peringkat
- Co-Crystallization of Honey With SucroseDokumen5 halamanCo-Crystallization of Honey With SucroseTTaddictBelum ada peringkat
- Automatic Transfer Switch PDFDokumen2 halamanAutomatic Transfer Switch PDFkummarai saileelaBelum ada peringkat
- Synthesis of p-NitroacetanilideDokumen5 halamanSynthesis of p-NitroacetanilideNuratiqah SalamBelum ada peringkat