Anda mungkin juga menyukai
- Rigol DS1054Z Schematic FrontEndDokumen1 halamanRigol DS1054Z Schematic FrontEndArief Noor RahmanBelum ada peringkat
- White-Paper Peltiertechnik 02-2013 EDokumen15 halamanWhite-Paper Peltiertechnik 02-2013 EArief Noor RahmanBelum ada peringkat
- Rigol DS1054Z Schematic DiffAmp PDFDokumen1 halamanRigol DS1054Z Schematic DiffAmp PDFArief Noor RahmanBelum ada peringkat
- 1996 CUG Presentation Nonblocking AssignsDokumen26 halaman1996 CUG Presentation Nonblocking AssignsArief Noor RahmanBelum ada peringkat
- l6561 PFC AnDokumen21 halamanl6561 PFC AnArief Noor RahmanBelum ada peringkat
- VLSI System Design For Automotive ControlDokumen7 halamanVLSI System Design For Automotive ControlArief Noor RahmanBelum ada peringkat
- A Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSDokumen6 halamanA Simple and Reliable Rectifier For PMSG Wind Turbines by Using Series Reactive Compensator Named MERSArief Noor RahmanBelum ada peringkat
- Modeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorDokumen11 halamanModeling and Control of A Wind Turbine Driven Doubly Fed Induction GeneratorArief Noor RahmanBelum ada peringkat
- 2N2222 Transistor BJTDokumen2 halaman2N2222 Transistor BJTMauricioGSBelum ada peringkat
- Modeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFDokumen12 halamanModeling of Small Wind Turbines Based On PMSG With Diode Bridge For Sensorless Maximum Power Tracking PDFArief Noor RahmanBelum ada peringkat
- Back To Back ConverterDokumen114 halamanBack To Back ConverterMateo Jimenez CastañoBelum ada peringkat
- 3 How To Create The PartsDokumen47 halaman3 How To Create The PartsArief Noor RahmanBelum ada peringkat
- A New Model of The Double-Feed Induction Generator Wind TurbineDokumen7 halamanA New Model of The Double-Feed Induction Generator Wind TurbineArief Noor RahmanBelum ada peringkat
- 3 How To Create The PartsDokumen47 halaman3 How To Create The PartsArief Noor RahmanBelum ada peringkat
- Progress 3Dokumen5 halamanProgress 3Arief Noor RahmanBelum ada peringkat
- MPC of Condesate Distillation ColumnDokumen9 halamanMPC of Condesate Distillation ColumnArief Noor RahmanBelum ada peringkat
- WorkstationDokumen160 halamanWorkstationArief Noor RahmanBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
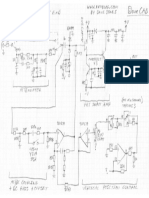
- Banshee AC To DC ConversionDokumen2 halamanBanshee AC To DC ConversiondannoxyzBelum ada peringkat
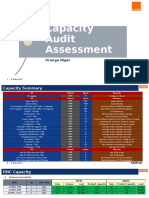
- Capacity Assessment TemplateDokumen13 halamanCapacity Assessment TemplateNavneet KishoreBelum ada peringkat
- Voltage Testing Systems for Medium Voltage SwitchgearDokumen12 halamanVoltage Testing Systems for Medium Voltage SwitchgearMostafa MohmmedBelum ada peringkat
- Pdvsa: Engineering Design ManualDokumen6 halamanPdvsa: Engineering Design Manual20jose12luisBelum ada peringkat
- Modulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonDokumen7 halamanModulation Strategies For Three-Phase AC-DC Matrix Converters A ComparisonSudip MondalBelum ada peringkat
- Aeb021104 - Automotive and Bus SCR - Controls NS4Dokumen20 halamanAeb021104 - Automotive and Bus SCR - Controls NS4Andres RamosBelum ada peringkat
- Microwave FiltersDokumen34 halamanMicrowave FiltersLinh TajBelum ada peringkat
- Network Devices, Cables & Connectors ExplainedDokumen29 halamanNetwork Devices, Cables & Connectors Explainedmiamor0783% (6)
- CW HCVR5108H V2 Manual PDFDokumen276 halamanCW HCVR5108H V2 Manual PDFRoblespaulBelum ada peringkat
- EEC Equivalent CircuitsDokumen185 halamanEEC Equivalent CircuitsMert YılmazBelum ada peringkat
- Design of Wireless Networks Linking Technology For Connecting Health Centers in Rural AreasDokumen13 halamanDesign of Wireless Networks Linking Technology For Connecting Health Centers in Rural AreasEighthSenseGroupBelum ada peringkat
- KGI K2V 1.5V Installation Information Rev 11-09-05Dokumen13 halamanKGI K2V 1.5V Installation Information Rev 11-09-05Maximiliano Villarreal100% (1)
- Eaton Online UPS User ManualDokumen40 halamanEaton Online UPS User ManualMatias Loza ZapataBelum ada peringkat
- TRANSDUCERDokumen11 halamanTRANSDUCERLucks GonzalesBelum ada peringkat
- Novel Algorithm For Estimating The Distance of Open-Conductor Faults in HV Transmission Lines (2012) PDFDokumen7 halamanNovel Algorithm For Estimating The Distance of Open-Conductor Faults in HV Transmission Lines (2012) PDFDanielAlejandroRamosQueroBelum ada peringkat
- 1SFC132094M0201 PSTX AB ProfinetDokumen28 halaman1SFC132094M0201 PSTX AB ProfinetJovanyBelum ada peringkat
- 2 4tec3Dokumen20 halaman2 4tec3betor_28Belum ada peringkat
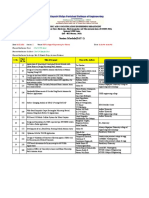
- ICMEET Paper Presentations Schedule PDFDokumen6 halamanICMEET Paper Presentations Schedule PDFKrishna ChaitanyaBelum ada peringkat
- Lesson in RoboticsDokumen10 halamanLesson in RoboticsScottie PollardBelum ada peringkat
- Ug948 Vivado Sysgen TutorialDokumen137 halamanUg948 Vivado Sysgen TutorialQuỳnh Lê CôngBelum ada peringkat
- TM 9-6115-484-14 Mep-Pu-810a/b Part 3Dokumen494 halamanTM 9-6115-484-14 Mep-Pu-810a/b Part 3AdvocateBelum ada peringkat
- 3102319-En R004 EST Life Safety Systems UL 2572 Application GuideDokumen36 halaman3102319-En R004 EST Life Safety Systems UL 2572 Application GuideMoises ReyesBelum ada peringkat
- Va1da en M B001Dokumen12 halamanVa1da en M B001cokicisneBelum ada peringkat
- Objective:: Study of The Multistage (Cascaded) AmplifierDokumen6 halamanObjective:: Study of The Multistage (Cascaded) Amplifierعلي حسنBelum ada peringkat
- BodeRules (Rules 4 Drawing Bode Diagrams)Dokumen4 halamanBodeRules (Rules 4 Drawing Bode Diagrams)pardeepkumarrocksBelum ada peringkat
- Luces John DeereDokumen26 halamanLuces John DeereIván CascudoBelum ada peringkat
- Jadual Peperiksaan Akhir Semester Ii Sesi Akademik 2020/2021 Bagi Program Ijazah Sarjana Muda Dan Diploma (Draf 1)Dokumen127 halamanJadual Peperiksaan Akhir Semester Ii Sesi Akademik 2020/2021 Bagi Program Ijazah Sarjana Muda Dan Diploma (Draf 1)Amirul AdamBelum ada peringkat
- Infineon IHW30N120R5 DataSheet v02 - 03 ENDokumen15 halamanInfineon IHW30N120R5 DataSheet v02 - 03 ENAsad AhmedBelum ada peringkat
- Subscriber Access CableDokumen20 halamanSubscriber Access CableКурбан УмархановBelum ada peringkat