Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Acu PressureDokumen26 halamanAcu PressureMuthuvel M100% (4)
- COADokumen137 halamanCOAThonta DariBelum ada peringkat
- Unit 1 CadDokumen29 halamanUnit 1 CadMuthuvel M82% (17)
- Unit 5 MetrologyDokumen16 halamanUnit 5 MetrologyMuthuvel M100% (2)
- Unit-4-Computer Aided DesignDokumen15 halamanUnit-4-Computer Aided DesignMuthuvel M100% (2)
- Unit 3 MetrologyDokumen38 halamanUnit 3 MetrologyMuthuvel M92% (36)
- Unit-3-Computer Aided DesignDokumen21 halamanUnit-3-Computer Aided DesignMuthuvel M100% (5)
- General Introduction Introduction of Composites: Historical Development / Historical Overview: PastDokumen514 halamanGeneral Introduction Introduction of Composites: Historical Development / Historical Overview: PastMuthuvel MBelum ada peringkat
- Computer Aided Manufacturing-UNIT-2Dokumen20 halamanComputer Aided Manufacturing-UNIT-2Muthuvel M100% (4)
- Unit-2-Computer Aided DesignDokumen42 halamanUnit-2-Computer Aided DesignMuthuvel M80% (5)
- Radams ' 09Dokumen370 halamanRadams ' 09Muthuvel M100% (1)
- Integration and Automation of Manufacturing SystemsDokumen593 halamanIntegration and Automation of Manufacturing SystemsAlejo LalvayBelum ada peringkat
- Unit 2 MetrologyDokumen32 halamanUnit 2 MetrologyMuthuvel M83% (6)
- Unit 4 MetrologyDokumen12 halamanUnit 4 MetrologyMuthuvel M89% (9)
- UNIT 3 MechatronicsDokumen38 halamanUNIT 3 MechatronicsMuthuvel M67% (6)
- UNIT 4 MechatronicsDokumen21 halamanUNIT 4 MechatronicsMuthuvel M100% (1)
- UNIT 2 MechatronicsDokumen35 halamanUNIT 2 MechatronicsMuthuvel M91% (11)
- Unit 1 Metro LogyDokumen9 halamanUnit 1 Metro LogyMuthuvel M100% (1)
- UNIT 1 MechatronicsDokumen15 halamanUNIT 1 MechatronicsMuthuvel M82% (17)
- UNIT 5 MechatronicsDokumen16 halamanUNIT 5 MechatronicsMuthuvel M85% (27)
- Te Unit 1Dokumen20 halamanTe Unit 1Muthuvel MBelum ada peringkat
- Te Unit 4Dokumen19 halamanTe Unit 4Muthuvel M100% (1)
- Unit 3 Me1203Dokumen25 halamanUnit 3 Me1203Muthuvel MBelum ada peringkat
- Te Unit 3Dokumen29 halamanTe Unit 3Muthuvel M100% (1)
- Unit 5 Me1203Dokumen25 halamanUnit 5 Me1203Muthuvel M100% (1)
- Unit 5 MTDokumen17 halamanUnit 5 MTMuthuvel MBelum ada peringkat
- Te Unit 2Dokumen22 halamanTe Unit 2krishnansriBelum ada peringkat
- Unit 4 Me1203Dokumen26 halamanUnit 4 Me1203Muthuvel MBelum ada peringkat
- Unit 2 Me1203Dokumen20 halamanUnit 2 Me1203Muthuvel MBelum ada peringkat
- Unit 1 Me1203Dokumen17 halamanUnit 1 Me1203Muthuvel M100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Heat 4e Chap04 LectureDokumen39 halamanHeat 4e Chap04 Lectureehdfhdhdfhdh100% (1)
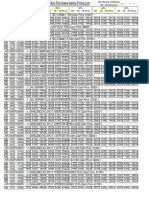
- PriceListHirePurchase NormalDokumen54 halamanPriceListHirePurchase NormalAfzaal AwanBelum ada peringkat
- Barc InterviewDokumen4 halamanBarc InterviewjishnuBelum ada peringkat
- RiegelsAerofoilSections PDFDokumen292 halamanRiegelsAerofoilSections PDFpickle77Belum ada peringkat
- A i r e- M a x A s ia P t e L t d VAV Flow Calibration and Recommended AirflowDokumen1 halamanA i r e- M a x A s ia P t e L t d VAV Flow Calibration and Recommended AirflowKingsley LimBelum ada peringkat
- The Particle Image Velocimetry - Characteristics Limits and Possible ApplicationsDokumen398 halamanThe Particle Image Velocimetry - Characteristics Limits and Possible ApplicationsAdrian DavidBelum ada peringkat
- Numerical Problem:: A Concrete Gravity Dam Has The Following DimensionsDokumen13 halamanNumerical Problem:: A Concrete Gravity Dam Has The Following DimensionsMuhammad Umer Arshad100% (1)
- Added MassDokumen3 halamanAdded MassAli PungaBelum ada peringkat
- Flash SteamDokumen9 halamanFlash SteamMuhammad RofiBelum ada peringkat
- Finite Element MethodsDokumen8 halamanFinite Element MethodsRavi KumarBelum ada peringkat
- 2002c-Dhakal Maekawa PDFDokumen10 halaman2002c-Dhakal Maekawa PDFdmep25Belum ada peringkat
- BitumenDokumen8 halamanBitumenwanBelum ada peringkat
- Gas Processors Suppliers Association GPSA Eng (Bookos - Org) - 701-821!1!60!1!20Dokumen20 halamanGas Processors Suppliers Association GPSA Eng (Bookos - Org) - 701-821!1!60!1!20Karen Vl100% (1)
- Mahindra & Mahindra LTD., Auto Sector. Graduate Engineer Trainee: Written TestDokumen9 halamanMahindra & Mahindra LTD., Auto Sector. Graduate Engineer Trainee: Written TestMad CateyBelum ada peringkat
- Tensile Test AnalysisDokumen10 halamanTensile Test AnalysisAkeju AyodeleBelum ada peringkat
- Module 4. Lesson 2 Design Response SpectrumDokumen6 halamanModule 4. Lesson 2 Design Response SpectrumRich Lenard L. MagbooBelum ada peringkat
- Design and analysis of concrete roof beamsDokumen30 halamanDesign and analysis of concrete roof beamsLee Yu Chan86% (7)
- Design an overhead crane beamDokumen95 halamanDesign an overhead crane beamEnrique Santiago BenavidesBelum ada peringkat
- TEMA Sheed L-R ExchangerDokumen1 halamanTEMA Sheed L-R ExchangerAlejandra BuenoBelum ada peringkat
- Arma 2018 047Dokumen7 halamanArma 2018 047Lígia BrumBelum ada peringkat
- Ramberg Osgood Stress-Strain - WIKIPEDIADokumen3 halamanRamberg Osgood Stress-Strain - WIKIPEDIAalbertoBelum ada peringkat
- Webinar Topics Covered: Hvac Webinar On 11 AprilDokumen2 halamanWebinar Topics Covered: Hvac Webinar On 11 AprilFarisBelum ada peringkat
- G38-01 (2013) Standard Practice For Making and Using C-Ring Stress-Corrosion Test SpecimensDokumen8 halamanG38-01 (2013) Standard Practice For Making and Using C-Ring Stress-Corrosion Test SpecimensislamakthamBelum ada peringkat
- Radiation Heat Transfer Analysis in High EmissivitDokumen7 halamanRadiation Heat Transfer Analysis in High EmissivitashvinBelum ada peringkat
- The Leading Edge by Goro Tamai - Table of ContentsDokumen1 halamanThe Leading Edge by Goro Tamai - Table of ContentsBentley PublishersBelum ada peringkat
- Ahe Lab QuestionDokumen3 halamanAhe Lab QuestionVijay A HwreBelum ada peringkat
- CE8301 SOM Unit 1Dokumen86 halamanCE8301 SOM Unit 1durai muruganBelum ada peringkat
- HT2Dokumen178 halamanHT2dhruvBelum ada peringkat
- Cooling Load Computations ExampleDokumen14 halamanCooling Load Computations ExampleJustin PeaceBelum ada peringkat
- ADDAX PETROLEUM HYDRAULIC PROGRAMDokumen1 halamanADDAX PETROLEUM HYDRAULIC PROGRAMAderobaki GbengaBelum ada peringkat