Anda mungkin juga menyukai
- Lab07 - Primera Ley de Kirchhoff Laboratorio 001 PDFDokumen6 halamanLab07 - Primera Ley de Kirchhoff Laboratorio 001 PDFSan Maycol FielBelum ada peringkat
- Presentacion 5 Instrumentos en Areas ClasificadasDokumen37 halamanPresentacion 5 Instrumentos en Areas ClasificadasNelson Humberto Yanez IraholaBelum ada peringkat
- Técnico en Instalación y Reparación de Equipo de CómputoDokumen39 halamanTécnico en Instalación y Reparación de Equipo de Cómputodiegoandres495Belum ada peringkat
- Tutorial ProteusDokumen22 halamanTutorial ProteusChema Juarez100% (1)
- Cesar David Urrego Tarea 1Dokumen6 halamanCesar David Urrego Tarea 1Duvan Camilo Vargas CelyBelum ada peringkat
- Resumen Red AzoguesDokumen3 halamanResumen Red Azoguesmega235235Belum ada peringkat
- Manual Punto A Punto-UbiquitiDokumen9 halamanManual Punto A Punto-UbiquitiEsteban José García ZamoraBelum ada peringkat
- Ondas y Campos Trabajo 1Dokumen3 halamanOndas y Campos Trabajo 1Franklin Yampier OrjuelaBelum ada peringkat
- Baño Maria - WNB22 - MEMMERT - Manual de UsuarioDokumen20 halamanBaño Maria - WNB22 - MEMMERT - Manual de UsuarioAlexander Guzmán HerreraBelum ada peringkat
- Guia Terminada, Sistemas Digitales y Perifericos - Semana 5 6 7 - PDokumen7 halamanGuia Terminada, Sistemas Digitales y Perifericos - Semana 5 6 7 - Pantonio100% (1)
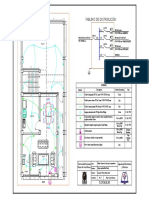
- Plano de Distribución - 1 NivelDokumen1 halamanPlano de Distribución - 1 NivelMax Fredi Quispe AguilarBelum ada peringkat
- Capitulo 9 Sonido en VivoDokumen6 halamanCapitulo 9 Sonido en VivoFrancisco Manuel Avila MarinBelum ada peringkat
- Práctica 6 Rectificación Trifásica ControladaDokumen6 halamanPráctica 6 Rectificación Trifásica ControladaJohn M. Romero100% (1)
- Aeg He 10-20 Kva - User Manual EsDokumen56 halamanAeg He 10-20 Kva - User Manual EsomarBelum ada peringkat
- Scada Examen FinalDokumen5 halamanScada Examen FinalJHON FREDY LIZARAZO CASTELLANOSBelum ada peringkat
- Informe 2.2Dokumen41 halamanInforme 2.2DavidBelum ada peringkat
- Manual Orbis Ins DATA MICRODokumen3 halamanManual Orbis Ins DATA MICROFlores Cesar100% (1)
- Curso Simatic S7300 Parte I PDFDokumen98 halamanCurso Simatic S7300 Parte I PDFingrid pereda100% (2)
- Reporte Práctica 2 (Punta Lógica)Dokumen5 halamanReporte Práctica 2 (Punta Lógica)Danilo LopezBelum ada peringkat
- Lista ComplusDokumen22 halamanLista ComplusFabián MedinaBelum ada peringkat
- Introducción Soporte Técnico FijoDokumen40 halamanIntroducción Soporte Técnico Fijocarlos moreno burgosBelum ada peringkat
- dbxSilverSeriesEQs OwnersManual Spanish - Original PDFDokumen12 halamandbxSilverSeriesEQs OwnersManual Spanish - Original PDFMarcosBelum ada peringkat
- Manual de Usuario ODK Collect 5-10-15Dokumen27 halamanManual de Usuario ODK Collect 5-10-15ERICK CHICONCULLOBelum ada peringkat
- Sony KDL-40BX425 No EnciendeDokumen28 halamanSony KDL-40BX425 No EnciendeSergio TarcayaBelum ada peringkat
- La Tecnología MMDSDokumen5 halamanLa Tecnología MMDSSandy MoralesBelum ada peringkat
- Tutorial ESP8266 Parte IDokumen16 halamanTutorial ESP8266 Parte IAus PolBelum ada peringkat
- UnadDokumen14 halamanUnadFabian ZambranoBelum ada peringkat
- HSC Domonial ES DS C PDFDokumen2 halamanHSC Domonial ES DS C PDFRaul SaviBelum ada peringkat
- Topologias de RedDokumen11 halamanTopologias de RedEdgard CAJACHAHUA ROJASBelum ada peringkat
- 001 Intro 1Dokumen13 halaman001 Intro 1Wendy Carhuatanta CotosBelum ada peringkat