Anda mungkin juga menyukai
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Guidelines La - Studii UptDokumen5 halamanGuidelines La - Studii Uptda_116107118Belum ada peringkat
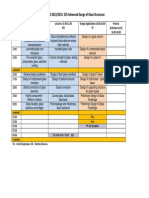
- Schedule 2013-2015Dokumen1 halamanSchedule 2013-2015da_116107118Belum ada peringkat
- SUCOS 2013/2015-2C08 Advanced Design of Steel and Composite StructuresDokumen1 halamanSUCOS 2013/2015-2C08 Advanced Design of Steel and Composite Structuresda_116107118Belum ada peringkat
- SUCOS 2013/2015-2C11 Business Economics and EntrepreneurshipDokumen1 halamanSUCOS 2013/2015-2C11 Business Economics and Entrepreneurshipda_116107118Belum ada peringkat
- SUCOS 2013/2015-2E5 Advanced Design of Glass StructuresDokumen1 halamanSUCOS 2013/2015-2E5 Advanced Design of Glass Structuresda_116107118Belum ada peringkat
- 07 - Transport Public LocalDokumen1 halaman07 - Transport Public Localda_116107118Belum ada peringkat
- Inginerie Civila (Engleza)Dokumen3 halamanInginerie Civila (Engleza)da_116107118Belum ada peringkat
- Guidance Paper L: European CommissionDokumen42 halamanGuidance Paper L: European Commissionda_116107118Belum ada peringkat
- Hollow Sections and Steel Grades: Advisory DeskDokumen1 halamanHollow Sections and Steel Grades: Advisory Deskda_116107118Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Notes FemDokumen88 halamanNotes FemShafqat HussainBelum ada peringkat
- Book NocseDokumen340 halamanBook Nocsemoussa yaserBelum ada peringkat
- Ames Tac PDFDokumen15 halamanAmes Tac PDFgaderi123Belum ada peringkat
- Practical 1: Measuring The Wind Profile in The Surface LayerDokumen5 halamanPractical 1: Measuring The Wind Profile in The Surface LayerajpsalisonBelum ada peringkat
- MAT 574 Theory of Differential Equations: Chetaev's Instability TheoremDokumen1 halamanMAT 574 Theory of Differential Equations: Chetaev's Instability Theoremhugonunes89Belum ada peringkat
- Carcione Et. Al. 2002 Seismic ModelingDokumen22 halamanCarcione Et. Al. 2002 Seismic ModelingAirBelum ada peringkat
- CS Chapter 8Dokumen113 halamanCS Chapter 8Mynam MeghanaBelum ada peringkat
- AOE3134 Topic0Dokumen9 halamanAOE3134 Topic0quockhanh29mtBelum ada peringkat
- Parta Roth Herwitz Stability CriterionDokumen28 halamanParta Roth Herwitz Stability CriterionVeena Divya KrishnappaBelum ada peringkat
- 6 Stability AnalysisDokumen35 halaman6 Stability Analysismass1984Belum ada peringkat
- 10 1 1 456 5401 PDFDokumen14 halaman10 1 1 456 5401 PDFSreehari RgBelum ada peringkat
- Lecture Notes On Nonlinear Vibrations CoDokumen153 halamanLecture Notes On Nonlinear Vibrations CoGerson CruzBelum ada peringkat
- (Mta) Cooperative Control PDFDokumen315 halaman(Mta) Cooperative Control PDFHossein Jalali MoghaddamBelum ada peringkat
- Robotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationDokumen15 halamanRobotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationMinh CaoBelum ada peringkat
- Ngineering Otes: Exponential Stability of A Path-Following AlgorithmDokumen7 halamanNgineering Otes: Exponential Stability of A Path-Following AlgorithmSaurabh SharmaBelum ada peringkat
- Dynamical Systems: Exercises and SolutionsDokumen55 halamanDynamical Systems: Exercises and SolutionsRoy VeseyBelum ada peringkat
- Cap 3 PDFDokumen20 halamanCap 3 PDFAnne KétriBelum ada peringkat
- Missile Autopilot Design For Agile Turn Control During Boost-PhaseDokumen6 halamanMissile Autopilot Design For Agile Turn Control During Boost-PhaseDiamoundDomeProgram R&DBelum ada peringkat
- Stability TestDokumen28 halamanStability TestjobertBelum ada peringkat
- ST VenantDokumen18 halamanST VenantgelicabalticaBelum ada peringkat
- Lectures in Feedback Design For Multivariable Systems-Springer International Publishing (2017)Dokumen414 halamanLectures in Feedback Design For Multivariable Systems-Springer International Publishing (2017)Carlos Barco100% (1)
- Delay SystemsDokumen417 halamanDelay SystemsarviandyBelum ada peringkat
- Advanced Control SystemsDokumen1 halamanAdvanced Control SystemsMohammed Abdul JabbarBelum ada peringkat
- Monin and Obukhov 1954Dokumen30 halamanMonin and Obukhov 1954Nikolay ZavgorodniyBelum ada peringkat
- Eugene Speer - Lecture 5Dokumen28 halamanEugene Speer - Lecture 5Leonardo LeiteBelum ada peringkat
- Lcs 9Dokumen5 halamanLcs 9MianBelum ada peringkat
- Nonlinear Circuits: Ljiljana TrajkovicDokumen7 halamanNonlinear Circuits: Ljiljana TrajkovicEduardo AraqueBelum ada peringkat
- Control System (136-248) PDFDokumen113 halamanControl System (136-248) PDFmuruganBelum ada peringkat