Anda mungkin juga menyukai
- Advances in Analog and RF IC Design for Wireless Communication SystemsDari EverandAdvances in Analog and RF IC Design for Wireless Communication SystemsGabriele ManganaroPenilaian: 1 dari 5 bintang1/5 (1)
- Handover Management in Wireless Networks: DR Sudesh Pahal, Vineet Gulia, Nishank Chauhan, Ashish GoelDokumen5 halamanHandover Management in Wireless Networks: DR Sudesh Pahal, Vineet Gulia, Nishank Chauhan, Ashish Goelricha chauhanBelum ada peringkat
- SAE and the Evolved Packet Core: Driving the Mobile Broadband RevolutionDari EverandSAE and the Evolved Packet Core: Driving the Mobile Broadband RevolutionPenilaian: 3 dari 5 bintang3/5 (2)
- 5G VS Wi-Fi Indoor Positioning: A Comparative StudyDokumen9 halaman5G VS Wi-Fi Indoor Positioning: A Comparative StudyijcsesBelum ada peringkat
- A Comparative Study of In-Sensor ProcessingDokumen6 halamanA Comparative Study of In-Sensor ProcessingIonuţ HwBelum ada peringkat
- Ijecev5n3 10Dokumen12 halamanIjecev5n3 10SheikhAbdulWahabBelum ada peringkat
- Design of IMAR Using Proxy Servers in Wireless NetworkDokumen5 halamanDesign of IMAR Using Proxy Servers in Wireless NetworkNehru Veerabatheran100% (1)
- Wifi Network ThesisDokumen7 halamanWifi Network Thesisdawnnelsonmanchester100% (2)
- 2.4 GHZ Signal Repeater For Long Distance Point To Point Wi-Fi TransmissionDokumen10 halaman2.4 GHZ Signal Repeater For Long Distance Point To Point Wi-Fi TransmissionCesar VargasBelum ada peringkat
- Designing K-12 Wireless NetworksDokumen13 halamanDesigning K-12 Wireless NetworksulexoxBelum ada peringkat
- Ijaiem 2013 04 27 078Dokumen7 halamanIjaiem 2013 04 27 078International Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- FWA - Fixed Wireless AccessDokumen15 halamanFWA - Fixed Wireless Accesstomarnitin19833526Belum ada peringkat
- WiMAX Radio Network Planning and Analysi PDFDokumen10 halamanWiMAX Radio Network Planning and Analysi PDFEze Alexander IkBelum ada peringkat
- Coverage Awareness of 5G NetworksDokumen3 halamanCoverage Awareness of 5G NetworksTemmBelum ada peringkat
- Introduction to WiFi - An Overview of Wireless Fidelity NetworksDokumen11 halamanIntroduction to WiFi - An Overview of Wireless Fidelity NetworksSrikanth G JBelum ada peringkat
- WirelessNetworks Journal 162Dokumen10 halamanWirelessNetworks Journal 162icang09Belum ada peringkat
- Electronics: Radio Over Fiber: An Alternative Broadband Network Technology For IotDokumen8 halamanElectronics: Radio Over Fiber: An Alternative Broadband Network Technology For IotKiều MyBelum ada peringkat
- Mobility Prediction For Mobile Agent-Based Service Continuity in The Wireless InternetDokumen12 halamanMobility Prediction For Mobile Agent-Based Service Continuity in The Wireless InternetgiannellicarloBelum ada peringkat
- Performance Evaluation of WiFi and WiMax Using OpnetDokumen9 halamanPerformance Evaluation of WiFi and WiMax Using OpnetDhanush JayaramBelum ada peringkat
- 5G Green Field Mobile Network Architecture and DesignDokumen21 halaman5G Green Field Mobile Network Architecture and DesignMirtunjayMirtunjayBelum ada peringkat
- Seminar on 4th Generation Wireless Systems - OFDM, UWB, and MoreDokumen25 halamanSeminar on 4th Generation Wireless Systems - OFDM, UWB, and MoreRanjitha NayakBelum ada peringkat
- Can Cognitive Radio Access To TV White Spaces Support Future Home Networks?Dokumen8 halamanCan Cognitive Radio Access To TV White Spaces Support Future Home Networks?JnashhBelum ada peringkat
- Embedded System Design For TelecommunicationDokumen4 halamanEmbedded System Design For TelecommunicationAqsa Liaqat0% (1)
- Solving Inbuilding 5G Challenges Solution Brief 010720Dokumen7 halamanSolving Inbuilding 5G Challenges Solution Brief 010720Mustafa NyazBelum ada peringkat
- FiWi Testbed Using SDR for Protocol TestingDokumen10 halamanFiWi Testbed Using SDR for Protocol TestingJOEL ALVINAGORTA HUANQUISBelum ada peringkat
- Wide-Area Long-Range Unidirectional Sensor (WALRUS) Network: Mitsubishi Electric Research Laboratories, Inc., 2006Dokumen10 halamanWide-Area Long-Range Unidirectional Sensor (WALRUS) Network: Mitsubishi Electric Research Laboratories, Inc., 2006Kiran ChakravarthulaBelum ada peringkat
- Network Slicing Technology in A 5G Wearable NetworkDokumen19 halamanNetwork Slicing Technology in A 5G Wearable NetworkBaljit HeerBelum ada peringkat
- Unit 1Dokumen27 halamanUnit 1Vishal Kumar 1902712Belum ada peringkat
- Wimax - An IntroductionDokumen10 halamanWimax - An IntroductionDeepak KandaBelum ada peringkat
- 5G Wireless - A Transformative, Disruptive Technology: Submitted by - Abishek Gowda B K (1Sj14Is001)Dokumen14 halaman5G Wireless - A Transformative, Disruptive Technology: Submitted by - Abishek Gowda B K (1Sj14Is001)ashBelum ada peringkat
- Intellectual Property in Broadband Mobile Telecommunications Research PapersDokumen4 halamanIntellectual Property in Broadband Mobile Telecommunications Research Papersgw259gj7Belum ada peringkat
- Paper - Performance Analysis of Handover Management in 5G Small CellsDokumen10 halamanPaper - Performance Analysis of Handover Management in 5G Small Cellsphillip jinBelum ada peringkat
- Airberry Whitepaper en 02 Wireless MeshDokumen8 halamanAirberry Whitepaper en 02 Wireless MeshpokechoBelum ada peringkat
- Wireless Network NotesDokumen15 halamanWireless Network NotesLearn SAPBelum ada peringkat
- Install WiMAX for Gaza UniversitiesDokumen24 halamanInstall WiMAX for Gaza UniversitiesAyman YounisBelum ada peringkat
- Module III UploadDokumen13 halamanModule III UploadssvalliBelum ada peringkat
- 5G Technology of Mobile CommunicationDokumen5 halaman5G Technology of Mobile CommunicationPorfirio DiazBelum ada peringkat
- CSC 472E Cat Wireless Sensor NetworksDokumen12 halamanCSC 472E Cat Wireless Sensor NetworksEzra KenyanyaBelum ada peringkat
- Introduction To Zigbee TechnologyDokumen24 halamanIntroduction To Zigbee Technologyveere_arunBelum ada peringkat
- Virtueman: A Software-Defined Network Architecture For Wifi-Based Metropolitan ApplicationsDokumen5 halamanVirtueman: A Software-Defined Network Architecture For Wifi-Based Metropolitan ApplicationsAllan LeandroBelum ada peringkat
- Wimax System Performance StudiesDokumen10 halamanWimax System Performance StudiesFelix GatambiaBelum ada peringkat
- Nokia Indoor Deployment StrategiesDokumen12 halamanNokia Indoor Deployment Strategiesbadboy3086Belum ada peringkat
- Wireless Options For High Data-Rate Indoor Users: Cognitive Access To TV White SpaceDokumen6 halamanWireless Options For High Data-Rate Indoor Users: Cognitive Access To TV White SpaceJnashhBelum ada peringkat
- HimanshuDokumen49 halamanHimanshuGurjeet SinghBelum ada peringkat
- QORIQQONVERGEWPDokumen23 halamanQORIQQONVERGEWPlilian novarianBelum ada peringkat
- IEEE COMMUNICATIONS SURVEYS & TUTORIALS, VOL. 15, NO. 1, FIRST QUARTER 2013Dokumen19 halamanIEEE COMMUNICATIONS SURVEYS & TUTORIALS, VOL. 15, NO. 1, FIRST QUARTER 2013JnashhBelum ada peringkat
- p2 4g Jhwang تلخيصيDokumen8 halamanp2 4g Jhwang تلخيصيpachava vaibhaviBelum ada peringkat
- RF Design in DoorDokumen3 halamanRF Design in DoorLukmanul HakimBelum ada peringkat
- RAN Sharing - New Paradigm For LTEDokumen10 halamanRAN Sharing - New Paradigm For LTEHarish Vadada100% (1)
- IET Networks - 2019 - Al Falahy - Coverage and Capacity Improvement of Millimetre Wave 5G Network Using Distributed BaseDokumen10 halamanIET Networks - 2019 - Al Falahy - Coverage and Capacity Improvement of Millimetre Wave 5G Network Using Distributed BaseTech TronieBelum ada peringkat
- Remote RF Solutions Becoming MainstreamDokumen30 halamanRemote RF Solutions Becoming Mainstreamflatelecom938Belum ada peringkat
- Integration of Wifi and Wimax Services: Bandwidth Optimization and Traffic CombinationDokumen14 halamanIntegration of Wifi and Wimax Services: Bandwidth Optimization and Traffic Combinationbulli babuBelum ada peringkat
- Zigbee FinalDokumen29 halamanZigbee FinalcvmgreatBelum ada peringkat
- 5315 Ijans 01Dokumen15 halaman5315 Ijans 01ijansjournalBelum ada peringkat
- HETNETDokumen8 halamanHETNETMousam JhaBelum ada peringkat
- Mobility Enhancement For IEEE 802.15.4 SUN-OFDM Using Channel Estimation and Viterbi Decoder With LikeDokumen12 halamanMobility Enhancement For IEEE 802.15.4 SUN-OFDM Using Channel Estimation and Viterbi Decoder With LikevarshasrinithiBelum ada peringkat
- Design Enterprise Wireless Local Area Network - Enterprise Wireless LANDokumen15 halamanDesign Enterprise Wireless Local Area Network - Enterprise Wireless LANArkabho Biswas100% (1)
- 7 Millimeter Wave Antenna Design For 5G ApplicationsDokumen18 halaman7 Millimeter Wave Antenna Design For 5G ApplicationsDjelloul AISSAOUIBelum ada peringkat
- World of Wi-Fi Paper PresentationDokumen6 halamanWorld of Wi-Fi Paper PresentationVivek MurtyBelum ada peringkat
- OFDMADokumen3 halamanOFDMAAp AshutoshBelum ada peringkat
- WYSE Advisors - Company ProfileDokumen2 halamanWYSE Advisors - Company ProfileKarthick ThiyaguBelum ada peringkat
- Measurement and ManagementDokumen9 halamanMeasurement and ManagementKarthick ThiyaguBelum ada peringkat
- Abstract - Review of LiteratureDokumen12 halamanAbstract - Review of LiteratureMahender Kumar DacharlaBelum ada peringkat
- 02 WholeDokumen275 halaman02 WholeKarthick ThiyaguBelum ada peringkat
- (Ebook - PDF) Untold Windows Tips and Secrets (Ankit Fadia)Dokumen22 halaman(Ebook - PDF) Untold Windows Tips and Secrets (Ankit Fadia)nimitkhanna7100% (1)
- A Short History of Photovoltaic CellsDokumen12 halamanA Short History of Photovoltaic CellsKarthick ThiyaguBelum ada peringkat
- gjfmv6n2 02Dokumen6 halamangjfmv6n2 02Karthick ThiyaguBelum ada peringkat
- Review of Literature on Capital MarketsDokumen22 halamanReview of Literature on Capital MarketsjayarawmanrBelum ada peringkat
- Iconic 12Dokumen645 halamanIconic 12Karthick ThiyaguBelum ada peringkat
- Geofencing and Background Tracking - The Next Features in LbssDokumen14 halamanGeofencing and Background Tracking - The Next Features in LbssKarthick ThiyaguBelum ada peringkat
- Software Engineering QBDokumen6 halamanSoftware Engineering QBKarthick ThiyaguBelum ada peringkat
- SWENGGG QBankDokumen6 halamanSWENGGG QBankKarthick ThiyaguBelum ada peringkat
- SW Engg 2 MarksDokumen32 halamanSW Engg 2 MarksKarthick ThiyaguBelum ada peringkat
- American English File Starter Ichecker - File 3Dokumen3 halamanAmerican English File Starter Ichecker - File 3Daniel AugustoBelum ada peringkat
- Instructions For Installation, Operating and Maintenance InstructionDokumen30 halamanInstructions For Installation, Operating and Maintenance InstructionmilacronBelum ada peringkat
- PARTSDokumen10 halamanPARTSTestrooteBelum ada peringkat
- AGA-3 Comparison Normal BetaDokumen12 halamanAGA-3 Comparison Normal BetahailriqBelum ada peringkat
- Trade Skills Assessment GuideDokumen25 halamanTrade Skills Assessment GuideRandz Lampa0% (1)
- Solution of EX2 Measurement of Liquid Electric C OnductivityDokumen4 halamanSolution of EX2 Measurement of Liquid Electric C OnductivityArifiantoBelum ada peringkat
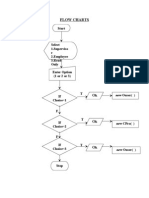
- Flow Charts Option: StartDokumen13 halamanFlow Charts Option: StartbalabooksBelum ada peringkat
- As 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisDokumen7 halamanAs 2560.2.1-2003 Sports Lighting Specific Applications - Lighting For Outdoor TennisSAI Global - APAC0% (1)
- Stand Cons T DetailsDokumen164 halamanStand Cons T DetailsmirfanjpcgmailcomBelum ada peringkat
- EA 4b ArchiMate Views and Viewpoints PDFDokumen41 halamanEA 4b ArchiMate Views and Viewpoints PDFanon_834023132Belum ada peringkat
- How To Fix Samsung CorbyDokumen2 halamanHow To Fix Samsung CorbyMohd Sariffudin DaudBelum ada peringkat
- PalindromeDokumen7 halamanPalindromeZy AdrianneBelum ada peringkat
- Stoichiometry - Determination of Percent by Mass of NaHCO3 in Alka Seltzer TabletsDokumen6 halamanStoichiometry - Determination of Percent by Mass of NaHCO3 in Alka Seltzer Tabletsgabbal009Belum ada peringkat
- BTSDokumen75 halamanBTSgyanesh198450% (2)
- Linux CommandsDokumen2 halamanLinux CommandsVishwas BeedeBelum ada peringkat
- Pressure Regulators (DRV Valve) Suitable ForDokumen4 halamanPressure Regulators (DRV Valve) Suitable ForNOUREDDINE BERCHAOUABelum ada peringkat
- 1329804769qno 5,6,7Dokumen94 halaman1329804769qno 5,6,7Aman MishraBelum ada peringkat
- GameBoy Programming ManualDokumen298 halamanGameBoy Programming Manualdiceman2037100% (4)
- Shop Manual WA380-3LE SN A50001Dokumen758 halamanShop Manual WA380-3LE SN A50001Eliecer godoy100% (2)
- 5SL43407RC Datasheet enDokumen5 halaman5SL43407RC Datasheet enDiana Martinez SifuentesBelum ada peringkat
- CHM096-Tutorial 1 (Alkanes & Alkenes)Dokumen4 halamanCHM096-Tutorial 1 (Alkanes & Alkenes)Anonymous RD1CrAIBelum ada peringkat
- multirab ura signaling issuesDokumen1 halamanmultirab ura signaling issuessha0% (1)
- Float Trap PennantDokumen2 halamanFloat Trap PennantJinalkumarBelum ada peringkat
- Sooad ManualDokumen19 halamanSooad ManualRakhiBelum ada peringkat
- Preliminary Pin-out for 12 Cylinder Engine Control UnitDokumen6 halamanPreliminary Pin-out for 12 Cylinder Engine Control UnitSUELENBelum ada peringkat
- Corrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsDokumen1 halamanCorrosion in Oil and Gas Industry A Perspective On Corrosion InhibitorsAsma Sed100% (1)
- Catalogo - CATUDokumen132 halamanCatalogo - CATUxis-zeroBelum ada peringkat
- Saes N 004Dokumen5 halamanSaes N 004Mo'tasem SerdanehBelum ada peringkat
- Stop Motion Pre Production - Negotiated BriefDokumen10 halamanStop Motion Pre Production - Negotiated Briefp4nd3m0n1c100% (1)
- Scallops Are Cut Outs in Weld Corners Which Are Used in Many Structures As in BridgesDokumen3 halamanScallops Are Cut Outs in Weld Corners Which Are Used in Many Structures As in BridgesJanuel BorelaBelum ada peringkat
- Build Your Own Electric Vehicle, Third EditionDari EverandBuild Your Own Electric Vehicle, Third EditionPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Electronics All-in-One For Dummies, 3rd EditionDari EverandElectronics All-in-One For Dummies, 3rd EditionPenilaian: 5 dari 5 bintang5/5 (2)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4.5 dari 5 bintang4.5/5 (542)
- Operational Amplifier Circuits: Analysis and DesignDari EverandOperational Amplifier Circuits: Analysis and DesignPenilaian: 4.5 dari 5 bintang4.5/5 (2)
- The Graphene Revolution: The Weird Science of the Ultra-thinDari EverandThe Graphene Revolution: The Weird Science of the Ultra-thinPenilaian: 4.5 dari 5 bintang4.5/5 (4)
- Understanding Automotive Electronics: An Engineering PerspectiveDari EverandUnderstanding Automotive Electronics: An Engineering PerspectivePenilaian: 3.5 dari 5 bintang3.5/5 (16)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsDari EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsPenilaian: 4 dari 5 bintang4/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesDari EverandThe Rare Metals War: the dark side of clean energy and digital technologiesPenilaian: 5 dari 5 bintang5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeDari EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgePenilaian: 5 dari 5 bintang5/5 (8)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemDari EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemBelum ada peringkat
- Digital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsDari EverandDigital Gold: The Beginner's Guide to Digital Product Success, Learn Useful Tips and Methods on How to Create Digital Products and Earn Massive ProfitsPenilaian: 5 dari 5 bintang5/5 (3)
- 8051 Microcontroller: An Applications Based IntroductionDari Everand8051 Microcontroller: An Applications Based IntroductionPenilaian: 5 dari 5 bintang5/5 (6)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionDari EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionPenilaian: 4 dari 5 bintang4/5 (331)
- Automotive Electronic Diagnostics (Course 2)Dari EverandAutomotive Electronic Diagnostics (Course 2)Penilaian: 4 dari 5 bintang4/5 (2)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingDari EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingPenilaian: 4 dari 5 bintang4/5 (1)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Dari EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Penilaian: 5 dari 5 bintang5/5 (1)
- Wearable Sensors: Fundamentals, Implementation and ApplicationsDari EverandWearable Sensors: Fundamentals, Implementation and ApplicationsEdward SazonovBelum ada peringkat
- Winning in 2025: Digital and Data Transformation: The Keys to SuccessDari EverandWinning in 2025: Digital and Data Transformation: The Keys to SuccessBelum ada peringkat
- A Mind at Play: How Claude Shannon Invented the Information AgeDari EverandA Mind at Play: How Claude Shannon Invented the Information AgePenilaian: 4 dari 5 bintang4/5 (52)
- Electrical Principles and Technology for EngineeringDari EverandElectrical Principles and Technology for EngineeringPenilaian: 4 dari 5 bintang4/5 (4)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsDari EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsPenilaian: 5 dari 5 bintang5/5 (2)