Anda mungkin juga menyukai
- Diseño Con Sensores y ActuadoresDokumen7 halamanDiseño Con Sensores y ActuadoresGadiel Armijos VBelum ada peringkat
- Aritmética Práctica 1°selección Semana-08Dokumen2 halamanAritmética Práctica 1°selección Semana-08Mervyn Loza Chilquillo100% (1)
- Luces de Velocidad VariableDokumen2 halamanLuces de Velocidad VariablejavichocixBelum ada peringkat
- Proyecto - Fuente de Poder de 12V para 3aDokumen14 halamanProyecto - Fuente de Poder de 12V para 3aluis piscoyaBelum ada peringkat
- Linea Tecnica Plantec PDFDokumen8 halamanLinea Tecnica Plantec PDFAgustin FranchettiBelum ada peringkat
- Sensor de Temperatura PDFDokumen16 halamanSensor de Temperatura PDFJuan Luis Uribe ArellanoBelum ada peringkat
- Respuesta XDDokumen2 halamanRespuesta XDOdalys Masapanta50% (2)
- Laboratorio No.3 Modelado y Simulación 2021Dokumen2 halamanLaboratorio No.3 Modelado y Simulación 2021bhebwhefbhwebhBelum ada peringkat
- Taller 2 HemisemestreDokumen3 halamanTaller 2 HemisemestreMaryin Paulina Bailon ArcentalesBelum ada peringkat
- Patrones y calibres para medición de longitudesDokumen4 halamanPatrones y calibres para medición de longitudesMatheo Moreno100% (1)
- Clase 18 - Dibujo Mecánico Roscas y RemachesDokumen78 halamanClase 18 - Dibujo Mecánico Roscas y RemachesKev AcuñaBelum ada peringkat
- Evolución del Dibujo TécnicoDokumen6 halamanEvolución del Dibujo TécnicoReynaldo Andre RamirezBelum ada peringkat
- DISEnOMECaNICOFABRICACIN PDFDokumen13 halamanDISEnOMECaNICOFABRICACIN PDFadrianBelum ada peringkat
- Fabricacion de Una Placa PBCDokumen16 halamanFabricacion de Una Placa PBCirisson007100% (1)
- Qué Es Un Transformador y para Qué SirveDokumen1 halamanQué Es Un Transformador y para Qué SirveJosue Moran75% (4)
- Normalizacion - Tema 2-Dibujo Industrial PDFDokumen51 halamanNormalizacion - Tema 2-Dibujo Industrial PDFmmorebal93975% (4)
- SÍLABO FÍSICA Oct.2022 - Feb2023Dokumen12 halamanSÍLABO FÍSICA Oct.2022 - Feb2023Cesaro LoquendoBelum ada peringkat
- Como Construir Un Robot ArañaDokumen20 halamanComo Construir Un Robot ArañaAlfred Maza QuiñonesBelum ada peringkat
- Filtros Pasa Altos ActivoDokumen11 halamanFiltros Pasa Altos ActivoFercho EspinosaBelum ada peringkat
- 02 Presentación Sustentacion de Tesis PDFDokumen130 halaman02 Presentación Sustentacion de Tesis PDFguillermoBelum ada peringkat
- Ensayo Datasheet PIC 16F877Dokumen5 halamanEnsayo Datasheet PIC 16F877Santiago CorreaBelum ada peringkat
- Eac Manual PDFDokumen53 halamanEac Manual PDFMartin ReyesBelum ada peringkat
- UnionesDokumen12 halamanUnionesRené FierroBelum ada peringkat
- Características de Los TornillosDokumen11 halamanCaracterísticas de Los TornillosLizbetZoraidaTurpoBurgosBelum ada peringkat
- Curso de Carpinteria Tema 1 A 5 PDFDokumen79 halamanCurso de Carpinteria Tema 1 A 5 PDFIng José David Cab AyalaBelum ada peringkat
- Simbologias Por Arco Electrico y OxiacetilenoDokumen14 halamanSimbologias Por Arco Electrico y OxiacetilenoJosué Medína Ramírez100% (1)
- Fundamentos de Dibujo TecnicoDokumen6 halamanFundamentos de Dibujo TecnicoJulian Hernando Mendoza ChaconBelum ada peringkat
- Bobinas: Antecedentes, materiales, cálculo del campo magnético y construcción de inductoresDokumen7 halamanBobinas: Antecedentes, materiales, cálculo del campo magnético y construcción de inductoresAnneRBelum ada peringkat
- DISEÑO DE UN INDUCTOR RECTILÍNEODokumen8 halamanDISEÑO DE UN INDUCTOR RECTILÍNEOLIMBERTOLEDO100% (1)
- Robotica sencilla desde ceroDokumen26 halamanRobotica sencilla desde ceroOscar Carcamo100% (1)
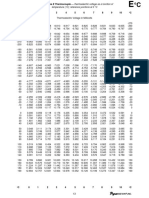
- Termopares Tipo E Tabla Tensión en Funcion de TemperaturaDokumen3 halamanTermopares Tipo E Tabla Tensión en Funcion de TemperaturaGilberto Andrés JuradoBelum ada peringkat
- Laboratorio 1 Elt3880-1-2019Dokumen4 halamanLaboratorio 1 Elt3880-1-2019Abigail CoraiteBelum ada peringkat
- Electricidad-Herramientas para InstalacionesDokumen37 halamanElectricidad-Herramientas para InstalacionesneomannextmanBelum ada peringkat
- Sistema de tolerancias dimensionales: Investigación sobre conceptos, representación y posición de la zona de toleranciaDokumen13 halamanSistema de tolerancias dimensionales: Investigación sobre conceptos, representación y posición de la zona de toleranciaJONATHAN EZEQUIEL PINARGOTE CHALLABelum ada peringkat
- NTC1831Dokumen36 halamanNTC1831Cristian J. MejíaBelum ada peringkat
- Diseño E Implementación de Un Lavado Y Secado de Manos AutomatizadoDokumen11 halamanDiseño E Implementación de Un Lavado Y Secado de Manos AutomatizadoAldo LariosBelum ada peringkat
- Derivada en MotoresDokumen9 halamanDerivada en MotoresSergio YepezBelum ada peringkat
- Tarea Convertidores Ca-CaDokumen16 halamanTarea Convertidores Ca-CaAndres Rilop100% (1)
- Capitulo 5 - Admitancia en Derivacion Lineas Aereas y SubterraneasDokumen15 halamanCapitulo 5 - Admitancia en Derivacion Lineas Aereas y SubterraneasBrenda Naranjo MorenoBelum ada peringkat
- Herramienta y UtillajeDokumen20 halamanHerramienta y UtillajeBenjamin Sanchez100% (1)
- ES1 2023 Estudio de CasoDokumen2 halamanES1 2023 Estudio de CasoJoaquin Robles HermosillaBelum ada peringkat
- INVESTIGACION Maquina HerramientaDokumen5 halamanINVESTIGACION Maquina HerramientaYulianethBelum ada peringkat
- Tipos de Uniones MecanicasDokumen13 halamanTipos de Uniones MecanicasJuan Carlos MolinaBelum ada peringkat
- Reporte de Practica #1Dokumen8 halamanReporte de Practica #1Ochoa JoshuaBelum ada peringkat
- Capacitacion Pantografo CNCDokumen14 halamanCapacitacion Pantografo CNCGonzalo CardozoBelum ada peringkat
- WTC 140Dokumen1 halamanWTC 140Cv JjBelum ada peringkat
- Informe Práctica 1 Grupo 2Dokumen10 halamanInforme Práctica 1 Grupo 2Samuel VillamilBelum ada peringkat
- Tubo de Rayos CatodicosDokumen18 halamanTubo de Rayos CatodicosVladimir Quispe OrihuelaBelum ada peringkat
- Ajuste MecanicoDokumen8 halamanAjuste Mecaniconelson100% (2)
- Principios de Programacion RoboticaDokumen7 halamanPrincipios de Programacion RoboticaMariano Ënriquë Dë JësusBelum ada peringkat
- Trazado y AcerradoDokumen15 halamanTrazado y AcerradoJesusForeroBelum ada peringkat
- Luces AudioritmicasDokumen5 halamanLuces Audioritmicasilm86Belum ada peringkat
- Reporte Del Puente HDokumen3 halamanReporte Del Puente HManuel DSaarabio100% (1)
- Funciones de ArduinoDokumen2 halamanFunciones de ArduinoCRISTHIAN CAMILO MONROY UNIVIOBelum ada peringkat
- Anexo 02-Requisitos para Planos en AutocadDokumen2 halamanAnexo 02-Requisitos para Planos en AutocadmagnificatBelum ada peringkat
- Control Numérico Computarizado: Fundamentos y Aplicaciones en Máquinas CNCDokumen45 halamanControl Numérico Computarizado: Fundamentos y Aplicaciones en Máquinas CNCCharly CastañedaBelum ada peringkat
- Diseño y Construcción de Un Robot Seguidor de LíneaDokumen8 halamanDiseño y Construcción de Un Robot Seguidor de LíneaDeyvis Gonzales Guevara0% (1)
- Carrito Seguidor de Línea NegraDokumen8 halamanCarrito Seguidor de Línea NegraSergio RamosBelum ada peringkat
- Robot Seguidor de LíneasDokumen6 halamanRobot Seguidor de LíneasCristian Andres Forero RicoBelum ada peringkat
- 01apuntes SiguelineasDokumen11 halaman01apuntes SiguelineasSDanielTorresPachasBelum ada peringkat
- Curriculum VitaeDokumen11 halamanCurriculum VitaeJacksito GuevaraBelum ada peringkat
- Alejandro Luis OtazoDokumen1 halamanAlejandro Luis OtazoJacksito GuevaraBelum ada peringkat
- CONSOLIDACIÓNDokumen2 halamanCONSOLIDACIÓNJacksito GuevaraBelum ada peringkat
- PreguntasDokumen8 halamanPreguntasJacksito GuevaraBelum ada peringkat
- Economía de La Cultura NazcaDokumen3 halamanEconomía de La Cultura NazcaJacksito Guevara90% (10)
- Sueño de una noche de veranoDokumen2 halamanSueño de una noche de veranoJacksito GuevaraBelum ada peringkat
- CV JhonyDokumen2 halamanCV JhonyJacksito GuevaraBelum ada peringkat
- Triptico MathiasDokumen2 halamanTriptico MathiasJacksito Guevara75% (8)
- PLanta de Cacao Plan LectorDokumen3 halamanPLanta de Cacao Plan LectorJacksito GuevaraBelum ada peringkat
- Isonitrilos: propiedades y nomenclatura de los grupos isocianatosDokumen2 halamanIsonitrilos: propiedades y nomenclatura de los grupos isocianatosJacksito GuevaraBelum ada peringkat
- El Caballero de Los MaresDokumen2 halamanEl Caballero de Los MaresJacksito GuevaraBelum ada peringkat
- Constitucion Politica Del PeruDokumen6 halamanConstitucion Politica Del PeruJacksito GuevaraBelum ada peringkat
- StuardDokumen2 halamanStuardJacksito GuevaraBelum ada peringkat
- Economía de La Cultura NazcaDokumen3 halamanEconomía de La Cultura NazcaJacksito Guevara90% (10)
- Recurso QuejaDokumen3 halamanRecurso QuejaJacksito GuevaraBelum ada peringkat
- COTIZACIÓNDokumen9 halamanCOTIZACIÓNJacksito GuevaraBelum ada peringkat
- Recurso QuejaDokumen3 halamanRecurso QuejaJacksito GuevaraBelum ada peringkat
- Himno de CallaoDokumen2 halamanHimno de CallaoJacksito Guevara50% (2)
- StuardDokumen2 halamanStuardJacksito GuevaraBelum ada peringkat
- Fernando Zapata LalupuDokumen6 halamanFernando Zapata LalupuJacksito GuevaraBelum ada peringkat
- Tema PrincipalDokumen1 halamanTema PrincipalJacksito GuevaraBelum ada peringkat
- Barra de MenúDokumen1 halamanBarra de MenúJacksito GuevaraBelum ada peringkat
- Carlos FuentesDokumen1 halamanCarlos FuentesJacksito GuevaraBelum ada peringkat
- Tema PrincipalDokumen1 halamanTema PrincipalJacksito GuevaraBelum ada peringkat
- Circuito ElectricoDokumen4 halamanCircuito ElectricoJacksito GuevaraBelum ada peringkat
- Declaracion Juarada PDFDokumen1 halamanDeclaracion Juarada PDFJacksito GuevaraBelum ada peringkat
- Declaracion Juarada PDFDokumen1 halamanDeclaracion Juarada PDFJacksito GuevaraBelum ada peringkat
- Declaracion JuaradaDokumen1 halamanDeclaracion JuaradaJacksito GuevaraBelum ada peringkat
- WQWDokumen5 halamanWQWJacksito GuevaraBelum ada peringkat
- Reciclaje y Destruccion CardenasDokumen1 halamanReciclaje y Destruccion CardenasJacksito GuevaraBelum ada peringkat
- Actividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoDokumen7 halamanActividad de Aprendizaje 16 Evidencia 3 Ficha Anyropologica y Test FisicoGeorgina FigueroaBelum ada peringkat
- Resumen El Vendedor Mas Grande Del Mundo WordDokumen3 halamanResumen El Vendedor Mas Grande Del Mundo WordFidelRamos100% (1)
- Tarea Semana 01 PlanificacionDokumen5 halamanTarea Semana 01 PlanificacionArmando GutierrezBelum ada peringkat
- Mariano Cubí y SolerDokumen4 halamanMariano Cubí y SolerNaomii CastroBelum ada peringkat
- Discurso Pilar ZamoraDokumen7 halamanDiscurso Pilar ZamoraCrisol De Ciudad RealBelum ada peringkat
- Ejercicios resueltos fracciones decimalesDokumen8 halamanEjercicios resueltos fracciones decimalesAldair Bolaños100% (1)
- Dirección Regional de Salud Piura TUPA 2010Dokumen54 halamanDirección Regional de Salud Piura TUPA 2010Luis Leopoldo Calle SalazarBelum ada peringkat
- Parámetros MeteorológicosDokumen7 halamanParámetros MeteorológicosGabriella ZulemaBelum ada peringkat
- Luminaria Pagoda Led 90Dokumen3 halamanLuminaria Pagoda Led 90Darío Harder MórtolaBelum ada peringkat
- EFTmanualDokumen135 halamanEFTmanualdinamicasvivenciales100% (13)
- Jacob Levy MorenoDokumen18 halamanJacob Levy MorenoFreddyVanDortBelum ada peringkat
- Secuencia Producci N TextodescrictivoDokumen4 halamanSecuencia Producci N TextodescrictivoSantiago Tasayco AvalosBelum ada peringkat
- Mineduc Siebv 2022 00002 CDokumen4 halamanMineduc Siebv 2022 00002 CDepartamento De Consejería Estudiantil Kitu-KaraBelum ada peringkat
- Informe de desarrollo de competencias científicas y tecnológicasDokumen2 halamanInforme de desarrollo de competencias científicas y tecnológicasHortencia Claudia Palomino Requi100% (1)
- Analisis Buscando A NemoDokumen6 halamanAnalisis Buscando A NemoColo ColoBelum ada peringkat
- 2 Contenido TarmaDokumen8 halaman2 Contenido TarmadiegoBelum ada peringkat
- Campo eléctrico y líneas equipotencialesDokumen4 halamanCampo eléctrico y líneas equipotencialesWilson Heredia100% (1)
- Monografia de Marketing InternoDokumen23 halamanMonografia de Marketing InternoElio Lazo Chayan75% (4)
- Trabajo de CriogenizacionDokumen6 halamanTrabajo de CriogenizacionMirella Denisse Ormeño RuizBelum ada peringkat
- EDUCACIÓNDokumen4 halamanEDUCACIÓNDelis TejadaBelum ada peringkat
- S4 - Funciones de Búsqueda - MsepDokumen15 halamanS4 - Funciones de Búsqueda - Msepjhonmp220304Belum ada peringkat
- Cuaderno de ObraDokumen5 halamanCuaderno de ObrajhonatanBelum ada peringkat
- Tema 4 Comunicación EfectivaDokumen2 halamanTema 4 Comunicación EfectivaAngel GonzálezBelum ada peringkat
- CancillerescaBastarda PDFDokumen40 halamanCancillerescaBastarda PDFJulio AlbertosBelum ada peringkat
- Anti LiderDokumen8 halamanAnti LiderJhuly HaroBelum ada peringkat
- Prueba de MercadoDokumen13 halamanPrueba de MercadodianaBelum ada peringkat
- Nudos borromeos y estructuras psíquicasDokumen8 halamanNudos borromeos y estructuras psíquicasloguitos123100% (1)
- Programación DinámicaDokumen5 halamanProgramación Dinámicaluchito_262100% (1)
- Preguntas de RepasoDokumen13 halamanPreguntas de RepasoLore RiveraBelum ada peringkat
- Taller 2 - FM - Sem1 - 2019Dokumen1 halamanTaller 2 - FM - Sem1 - 2019Javiera Hernandez OBelum ada peringkat