RCT 16 Art 04
Diunggah oleh
Manolo GipielaJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
RCT 16 Art 04
Diunggah oleh
Manolo GipielaHak Cipta:
Format Tersedia
Fontes de Erros em Metrologia a Trs Coordenadas: consideraes gerais
Error Sources in Coordinate Metrology: general considerations
ROXANA M. MARTINEZ ORREGO
Universidade Metodista de Piracicaba rmorrego@unimep.br
BENEDITO DI GIACOMO
Escola de Engenharia de So Carlos (EESC-USP) bgiacomo@sc.usp.br
ALVARO J. ABACKERLI
Universidade Metodista de Piracicaba abakerli@unimep.br
RESUMO - Ao longo das ltimas quatro dcadas, o uso da metrologia a trs coordenadas incrementou-se, signicativamente, em todos os ramos da indstria. As mquinas de medir a trs coordenadas (MM3C) so instrumentos versteis, que possibilitam aplicaes gerais e reduzem o tempo das avaliaes dimensionais, necessrias para denir as caractersticas principais de peas manufaturadas. Dessa forma, elas proporcionam uma infra-estrutura metrolgica muito mais modesta, porm ideal para os sistemas integrados de manufatura. Do ponto de vista metrolgico, as propriedades mais cobiadas das mquinas de medir a trs coordenadas sua exibilidade e versatilidade as tornam, entretanto, instrumentos extremamente complexos quando se trata de avaliar seu desempenho metrolgico e, mais ainda, quando se tenta denir a rastreabilidade de suas medies e expressar adequadamente sua incerteza de medio. O desempenho metrolgico das MM3C tem sido, desde o incio, objeto de estudo de numerosas instituies e centros de pesquisa em todo o mundo, assim como dos prprios fabricantes dessas mquinas. Neste trabalho, so apresentadas e discutidas as principais fontes de erros e incertezas das mquinas de medir a trs coordenadas, com base nos resultados de uma ampla pesquisa bibliogrca sobre o estado da arte da calibrao e a rastreabilidade de tais mquinas. Palavras-chave: MQUINAS DE MEDIR ERROS INCERTEZA DE MEDIO CALIBRAO. ABSTRACT - In last four decades, the use of coordinate metrology increased, signicantly, in all industry branches. Coordinate measuring machines (CMM) are versatile instruments, that facilitate general applications and reduce the time of the dimensional evaluations necessary to dene the main characteristics of manufactured pieces. This way, they provide a much more modest metrological infrastructure, ideal for the integrated manufacture systems. However, of a metrological point of view, the more coveted properts of the coordinate measuring machines its exibility and versatility turn them, extremely, complex instruments when the goal is the evaluation of its volumetric performance and, stiller, when its measurements traceability should be dened and the measurement uncertainty appropriately expressed. Since the beginning, the CMM volumetric performance has been studied by numerous institutions and research centers all over the world, as well as by the proper machines manufacturers. In this work, the main sources of errors and uncertainties of coordinate measuring machines are presented and discussed, with base on the results of a wide bibliographical research on the state of the art of coordinates measuring machines calibration and traceability. Keywords: COORDINATE MEASURING MACHINE ERROR MEASUREMENT UNCERTAINTY CALIBRATION.
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
43
INTRODUO
A crescente exigncia de produtos de alta qualidade, e com alto grau de diferenciao, foi a principal caracterstica do mercado consumidor nas ltimas dcadas do sculo XX. Essa demanda aqueceu a competio industrial e acelerou o desenvolvimento de sistemas de manufatura automatizados, tornando-os muito mais exveis, capazes de realizar processos de fabricao curtos e rpidos, com menor custo e com melhor qualidade. No mbito da indstria metal mecnica, a busca pela qualidade tambm est diretamente relacionada s avaliaes dimensionais, que denem, em grande parte, as caractersticas principais dos produtos. Paralelamente automatizao das mquinas ferramentas, surge a necessidade de desenvolver meios de medio que no limitem a efetividade dos novos sistemas de manufatura, ou seja, que permitam realizar as inspees de forma fcil e rpida, mas ainda fornecendo resultados conveis. nesse contexto que aparece a indstria das mquinas de medir a trs coordenadas. A primeira mquina de medir por coordenadas foi introduzida na indstria em 1959, por Ferranti, Ltd. of Dalkeith, na Esccia. Para este fabricante havia cado claro que os instrumentos de medio convencionais, encarregados at ento pela inspeo das peas produzidas, no acompanhavam o ritmo de produo de suas novas mquinas automatizadas. Apesar de no pertencer ao ramo de equipamentos de medio, inventou uma mquina de medir como um produto para completar sua famlia de mquinas ferramentas controladas numericamente (Phillips, 1995). A mquina da Ferranti apresentava um desenho original baseado em um mnimo de restries cinemticas, mas que ainda permitiam o alinhamento de seus elementos mveis. Ela oferecia uma resoluo de 0,012 mm e possua um curso muito pequeno (254 mm) na direo Z. As leituras eram feitas s nas direes X e Y (610 mm e 381 mm, respectivamente). A mquina usava uma sonda rgida para estabelecer os pontos de inspeo. Segundo Ferranti, ela estava desenhada para inspecionar as peas com uma acuracidade de 0,025 mm.
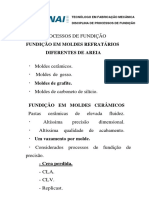
De incio, os fabricantes de instrumentos de medio no reconheceram o potencial oferecido por essa iniciativa de Ferranti; no entanto, seu uso revolucionou os mtodos de inspeo de peas manufaturadas, minimizando o tempo de medio e os requisitos relacionados qualicao do pessoal de inspeo. De fato, em poucos anos surgiu um mercado para essa inveno, que levou ao desenvolvimento da indstria de mquinas de medir a trs coordenadas, que oferece, hoje em dia, mquinas em diferentes conguraes mecnicas (ver g. 1), capazes de realizar as mais diferentes tarefas de medio. Entretanto, nem mesmo o grande entusiasmo despertado pela universalidade das MM3C evitou a preocupao pela sua acuracidade. Apesar de seu muito particular princpio de medio, o desempenho metrolgico de uma MM3C depende, como ocorre com qualquer outro instrumento, de seus erros de medio. Em geral, todos os autores estudados concordam com a extrema complexidade da anlise dos erros de uma MM3C e de suas respectivas fontes. So muitas as variveis envolvidas na anlise, incluindo a prpria congurao mecnica da mquina, cujas estruturas mais comuns so chamadas de tipo ponte mvel, ponte xa, cantilever, brao horizontal e prtico (Ni & Wldele, 1995). A gura 1 apresenta cinco destas conguraes. Todas as conguraes infringem o princpio de Abb, principal postulado da metrologia dimensional (Journal for Instrumental Information, 1890), pois geralmente as escalas esto localizadas fora da linha de medio, o que introduz o efeito de possveis movimentos angulares no desejados, mas presentes durante a movimentao dos eixos das mquinas. O grande nmero de variveis envolvidas na anlise do desempenho metrolgico de MM3C e a sua variedade constituem a principal causa do atraso signicativo no processo da especicao do seu desempenho (Emery, 1965; CIRP STC Me Working Party on 3DU, 1978; e Productions Points, 1983), de modo que no existe, ainda hoje, um acordo internacional sobre os critrios e os mtodos para a sua calibrao.
44
Dezembro 2000
Fig. 1. Conguraes de Mquinas de Medir a Trs Coordenadas
CARACTERIZANDO UMA MQUINA DE MEDIR A TRS COORDENADAS
Uma Mquina de Medir a Trs Coordenadas, independentemente de qual seja sua estrutura mecnica, a representao fsica de um sistema de coordenadas cartesiano. A mquina dene a geometria
de uma pea atravs de pontos coordenados (Xi, Yi, Zi), dispersos discretamente sobre a sua superfcie. Os eixos cartesianos so simulados, geralmente, por um conjunto de guias e mancais aerostticos e com ajuda de escalas optoeletrnicas. Para obter os pontos sobre a superfcie das peas usada uma sonda de medio.
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
45
No entanto, o conhecimento dos pontos coordenados no suciente para avaliar os parmetros das peas (dimetros, distncias, ngulos etc.). necessrio que a mquina tenha associado um programa computacional com algoritmos matemticos adequados para ajustar os pontos coordenados s geometrias usualmente chamadas de geometrias substitutas que modelam a pea medida. As caractersticas ou parmetros principais das geometrias substitutas ou da sua combinao so comparadas, ento, s dimenses e tolerncias do projeto da pea. A gura 2 ilustra a natureza das medies com uma MM3C. Os efeitos das diferentes fontes de erros presentes em uma MM3C se combinam das mais diversas formas e se reetem, diretamente, nos pontos coordenados que denem as geometrias substitutas. exatamente essa particularidade que torna extremamente complexa a anlise dos erros e da incerteza de medio de qualquer tipo de mquina de medir, pois cada ponto coordenado inuenciado de forma diferente. Na literatura, os erros de uma mquina de medir a trs coordenadas so agrupados geralmente, segundo as suas fontes (Hocken, 1980; Burdekin & Voutsadopoulos, 1981; Harvie, 1986; Di Giacomo, 1986; De Nijs et al., 1988; Weekers & Schellenkens, 1995; e Schellenkens & Rosielle, Fig. 2.
1998). Observando tal critrio, no presente trabalho agrupam-se os erros nos sete grupos resumidos a seguir: 1. erros em funo de imperfeies da geometria da mquina, resultantes da manufatura, da montagem e do desgaste de seus componentes, que introduzem graus de liberdade no desejados, e erros resultantes de foras estticas, como o prprio peso dos componentes mveis das mquinas, que introduzem deformaes elsticas; 2. erros do sistema de medio ou sonda, encarregado de denir os pontos coordenados atravs do contato com a superfcie de uma pea; 3. erros relacionados aos algoritmos matemticos, que denem as geometrias substitutas, e com sua respectiva implementao computacional (software) (Hocken et al., 1993); 4. erros relacionados com a estratgia de medio: nmero de pontos e disperso destes sobre a superfcie da pea; 5. erros derivados da inuncia das propriedades da pea a ser medida: principalmente de erros de forma, rugosidade e peso; 6. erros devidos s deformaes induzidas na mquina pelas variaes e os gradientes de temperatura; 7. e erros dinmicos devido a vibraes.
46
Dezembro 2000
Os erros dos trs primeiros grupos so erros prprios ou intrnsecos das MM3C e a inuncia deles se manifesta das mais diversas formas. Os erros dos grupos 4, 5, 6 e 7, por sua vez, independem das MM3C, pois derivam de condies externas a elas, tais como: a temperatura ambiental, a escolha pelo operador de uma estratgia de medio, vibraes externas provocadas pelo funcionamento de outras mquinas etc. De todos esses erros, os que mais inuenciam a acuracidade das mquinas de medir a trs coordenadas so os pertencentes aos grupos 1, 2 e 6 (Hocken, 1980 e 1993). Nesse ponto coincidem todos os autores estudados. Cabe ento discutir alguns aspectos relevantes relacionados s fontes de erros, que afetam o resultado das medies realizadas com as MM3C.
g. 3). Trs destes erros so de translao: um erro de escala ou posio e dois erros de retilineidade. Os outros trs so erros angulares ou de rotao innitesimais, chamados de ROLL, PITCH e YAW , cujos efeitos so amplicados pela presena de braos de Abbe. Alm dos 18 erros paramtricos, h trs outros no-paramtricos, que so os erros de ortogonalidade entre os eixos da mquina, totalizando 21 erros geomtricos. A combinao dos 21 erros geomtricos de uma MM3C gera o que se convencionou chamar de erro volumtrico. A forma geral do erro volumtrico para qualquer ponto espacial no volume de trabalho de uma mquina de medir a trs coordenadas dada pela expresso (Di Giacomo, 1986):
Ev i =
Ex i + Ey i + Ez i
(1)
ERROS GEOMTRICOS
Ao longo de todos estes anos, os erros mais estudados tm sido os erros geomtricos, pertencentes ao primeiro grupo, pois sua contribuio para a acuracidade das mquinas considerada a mais signicativa de todas (Peggs, 1990; e Hocken et al., 1993). Os elementos mveis das mquinas de medir a trs coordenadas so desenhados como corpos rgidos: com restries cinemticas para 5 de seus 6 graus de liberdade e com movimento em uma nica direo. Em uma mquina de medir com trs eixos tm-se, ento, para cada eixo da mquina, 6 erros geomtricos, chamados tambm de erros paramtricos, devido sua dependncia com a posio (ver
onde Exi, Eyi e Ezi representam a combinao dos erros geomtricos que inuenciam em cada uma das trs direes preferenciais. As MM3C usadas diretamente na linha de produo apresentam, freqentemente, erros geomtricos de grandezas prximas s das tolerncias atuais de uma grande variedade de peas (Hocken et al., 1993). A natureza sistemtica dos erros geomtricos permite sua correo ou compensao atravs de programas computacionais, o que melhora de forma expressiva a acuracidade das mquinas (Hocken et al., 1977; Zhang et al., 1985; Belforte et al., 1987; Sartori, 1995; Kunzmann et al., 1995; e Martinez Orrego, 1999).
Fig. 3. Erros geomtricos de uma mquina de medir a trs coordenadas (Martinez Orrego, 1999). A) 6 erros geomtricos do carro com movimento de translao pura na direo Y; B) 3 erros angulares -a k o devido falta de ortogonalidade entre os eixos perpendiculares direo k.
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
47
ERROS DEVIDO AO PESO DOS COMPONENTES DA MQUINA
O movimento contnuo dos carros encarregados de posicionar o ponto de prova no volume de trabalho de uma mquina de medir desloca o centro de gravidade de sua estrutura, provocando variaes dos estados de deformao dela. Por exemplo, a variao da posio e da grandeza dos esforos internos das guias, provocada pelo peso dos carros em movimento, pode modicar os erros geomtricos da mquina (Hocken, 1980; e Cardoza, 1995). Os efeitos dos erros induzidos pelo peso prprio dos componentes das mquinas de medir podem ser, se no eliminados, pelo menos minimizados atravs de desenhos e materiais capazes de fornecer maior rigidez estrutura das mquinas. comum o uso de tcnicas de protenso e das tcnicas de apoio de Airy para minimizar as deexes sofridas pelas vigas ou guias muito longas (Trumpold, 1984; Cardoza, 1995; e Kunzmann et al., 1995).
Fig. 4. Sonda do tipo touch trigger (Phillips, 1995).
ERROS DO SISTEMA DE MEDIO OU SONDA
A sonda o sistema de medio encarregado de tomar os pontos coordenados sobre a superfcie da pea que est sendo medida pela MM3C. Inicialmente, dispunha-se somente de sondas rgidas: esferas, cones, discos e cilindros. Com o passar do tempo, desenvolveram-se sondas com mecanismos eletromecnicos, como o bem conhecido touch-trigger, que agilizaram e ampliaram o uso das mquinas de medir. Uma sonda do tipo touch-trigger funciona como um interruptor eltrico: quando a ponta da sonda faz contato com a superfcie da pea, fecha-se ou abre-se um circuito (por exemplo, fechando ou abrindo um contato mecnico) e envia-se um pulso eltrico ao sistema de controle que imediatamente l a posio indicada pelas trs escalas da mquina. A gura 4 mostra a estrutura de uma sonda desse tipo. Em princpio, o desenho da sonda touch-trigger restringe todos os movimentos da ponta de prova. Dessa forma, sua posio com respeito ao corpo da sonda sempre conhecida. Qualquer desvio ou distoro dessa posio inicial so interpretados, ento, como um ponto de medio (Van Vliet & Schellekens, 1998).
As sondas do tipo touch-trigger so as mais usadas nas MM3C mas, geralmente, quando avaliadas, apresentam um padro de trs lbulos que provoca um erro, freqentemente, da mesma ordem de grandeza das tolerncias da pea. Pesquisas mais recentes, variando parmetros como o comprimento e a orientao da haste usada na sonda, demonstraram que o valor desses erros pode equivaler vrias vezes tolerncia desejada para medio (Hocken et al., 1993). Entretanto, outras famlias mais modernas de sondas touch-trigger tm princpios de funcionamento baseados em cristais piezeltricos, que lhes conferem melhores caractersticas funcionais, apresentando erros (padro de lbulos) no perceptveis no nvel de incerteza das MM3C. Outro tipo de sonda diz respeito quelas que utilizam princpios pticos ou optoeletrnicos (triangulao, reexo, processamento de imagens etc.) para determinar os pontos coordenados. As sondas pticas no fazem contato com a superfcie das
48
Dezembro 2000
peas e isso possibilita a medio de peas sensveis ao contato ou de peas especialmente nas, cuja medio por contato requer esforos adicionais (Ni & Wldele, 1995). Os erros sistemticos devido sonda, seja seu princpio de medio por contato ou ptico, podem ser, eventualmente e sob condies bastante especcas, modelados e compensados atravs de programas computacionais (Estler et al., 1996; Estler et al., 1997; e Pahk et al., 1996 e 1998).
ERROS DERIVADOS DOS PROGRAMAS COMPUTACIONAIS
Os programas computacionais associados a uma MM3C, basicamente, armazenam os pontos coordenados e determinam as geometrias substitutas atravs de algoritmos matemticos que denem formas geomtricas, como ponto, reta, plano, crculo, cilindro e cone, alm de suas possveis combinaes: interseco de dois planos, distncia entre centros etc. Os fabricantes desenvolvem e utilizam diferentes algoritmos matemticos para denir as geometrias substitutas (mnimos quadrados, mnimo crculo circunscrito, mximo crculo inscrito etc.) e os implementam em programas computacionais, sem que existam ainda especicaes, internacionalmente aceitas, para estabelecer a sua integridade (Krecji, 1995). Em 1986, Porta & Wldele do PhysikalischTechnische Bundesanstalt (PTB) relataram os resultados da primeira fase de um projeto da Commission of the European Communities sobre testes realizados com os algoritmos matemticos para calcular reta, plano, crculo, cilindro e cone, usados por 12 programas diferentes de MM3C. Nesses testes foi usado um conjunto de pontos coordenados simulados para cada uma das geometrias. Os resultados fornecidos pelos diferentes programas, usando os pontos simulados, foram ento comparados com os calculados por um programa de referncia desenvolvido pelo PTB. As diferenas a encontradas foram atribudas aos algoritmos usados e sua respectiva implementao, e no limitada acuracidade dos computadores, mostrando, assim, que os programas computacionais no esto livres de erros.
A implementao dos algoritmos um fator importante. A maioria dos problemas de ajustes de geometrias no linear. Isso obriga a usar tcnicas recursivas para estabelecer os parmetros corretos, mas tais tcnicas geralmente so lentas e, portanto, muitos programadores terminam usando aproximaes lineares para agilizar os clculos, o que pode levar a resultados incorretos (Hocken et al., 1993; e Phillips, 1995). Em 1988, alertou-se para o fato de que certos algoritmos usados nos programas de MM3C para denir erros de forma e posio no calculavam os parmetros destes erros segundo o estabelecido pela norma ANSI Y14.5: Dimensioning and Tolerancing Standard. O problema principal reside na interpretao geomtrica das denies contidas nessa norma, que no esto baseadas no uso de ajustes por mnimos quadrados. No caso de um furo, por exemplo, especica-se o maior crculo inscrito e no caso de um cilindro, o menor cilindro circunscrito; porm, como a maioria das MM3C dene as geometrias usando o ajuste por mnimos quadrados, os programas no fornecem, em muitos casos, os resultados mais adequados (Hocken et al., 1993). A International Standard Organization (ISO) desenvolve, atualmente, uma norma com mtodos de teste para elementos substitutos denidos usando mnimos quadrados (Krecji, 1995).
ERROS DERIVADOS DA ESTRATGIA DE MEDIO
Nos dias de hoje, a estratgia para medir uma pea determinada pela experincia do operador da MM3C. Ele escolhe qual caracterstica ser medida primeiro, onde colocar os sistemas de coordenadas da pea para facilitar a medio, qual opo do programa usar para medir os parmetros da pea e, sobretudo, quantos pontos tomar e como dispers-los sobre a superfcie dela. Entre todas essas escolhas, as que mais afetam o resultado da medio so as duas ltimas: o nmero de pontos e a localizao destes sobre a superfcie da pea. Esses dois fatores esto interligados, diretamente, com a efetividade das aproximaes feitas na implementao dos algoritmos escolhidos para denir as geometrias. O grau de concordncia das aproximaes implementadas
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
49
com os valores matematicamente corretos depende da natureza da aproximao e do grupo particular de pontos analisados. As aproximaes podem funcionar bem para muitas medies, mas tambm podem provocar erros considerveis, quando analisada uma quantidade diferente de pontos coordenados ou quando estes so distribudos de forma diferente sobre a superfcie da pea (Hocken et al., 1993; Weckenmann et al., 1995; Phillips, 1995; e Weckenmann et al., 1998). Do ajuste de geometrias por mnimos quadrados, a partir de um nmero insuciente de pontos coordenados e de uma inadequada distribuio desses pontos, pode-se obter resultados muito diferentes dos reais. Por exemplo, segundo Coy (1990), no clculo de erros de formas, os resultados podem ser cinco vezes maiores que os verdadeiros. Situaes similares acontecem na medio de todas as geometrias, apesar da existncia de procedimentos de medio (tcnica de reverso) que, se aplicados, permitem reduzir esses erros (Estler, 1985; Hocken et al., 1977; e Evans et al., 1996). Entretanto, tais tcnicas no s requerem um nmero grande de pontos, o que aumenta o tempo de medio, mas tambm uma rigorosa capacitao do operador da mquina de medir. Por outro lado, sabe-se que os erros causados pelo nmero inadequado de pontos so, na maioria dos casos, muito menores quando se utilizam 50 ou mais pontos para denir a geometria (Hocken et al., 1993). Contudo, no processo de inspeo, deseja-se medir as peas o mais rpido possvel, o que implica que a maioria dos usurios de MM3C medem as caractersticas das peas tomando o mnimo de pontos possveis. Nos ltimos anos, o objetivo principal de vrios trabalhos de pesquisa tem sido a busca do mnimo de pontos necessrios para descrever adequadamente cada geometria, segundo o algoritmo (mnimos quadrados, minimax etc.) usado para determinar seus parmetros principais e considerando tambm sua distribuio sobre a superfcie da pea (Caskey et al. 1991; Odayappan, 1992; Bourdet et al., 1993; Machireddy, 1993; Phillips et al., 1994; Weckenmann et al., 1995; e Edgeworth & Wilhelm, 1999). Odayappan (1992) prope um nmero de pontos mnimo a quatro dos algoritmos
mais usados pelas MM3C para medir crculos: mnimos quadrados, minimax, mnimo crculo circunscrito e mximo inscrito. A recomendao feita neste trabalho considera, inclusive, o nmero de lbulos da pea. De tudo o que foi exposto anteriormente, pode-se concluir serem necessrios maiores volumes de dados para evitar os erros causados pela quantidade indevida de pontos e a sua distribuio. Isso requer o desenvolvimento de MM3C mais rpidas, de modo a compensar o aumento do tempo de medio (Hocken et al., 1993). Por outro lado, para evitar que as decises a respeito da escolha do critrio de avaliao e da quantidade de pontos e sua distribuio sejam tomadas pelos operrios de forma intuitiva e baseada na experincia, so necessrios sistemas inteligentes, capazes de analisar a geometria a ser medida e decidir o algoritmo, a quantidade de pontos e a distribuio mais apropriada para a medio (Hocken 1993; e Weckenmann et al., 1995).
INFLUNCIAS DAS PROPRIEDADES DA PEA A SER MEDIDA
Toda pea manufaturada geometricamente imperfeita; nela esto presentes os efeitos das falhas do processo de sua manufatura. Quando se xa a pea no desempeno de uma MM3C, podem ocorrer outras distores, que, juntamente com suas imperfeies geomtricas e seu acabamento supercial, podem levar a uma interpretao incorreta dos resultados da medio de determinada caracterstica. Os erros causados pelas imperfeies da pea esto diretamente relacionados com as caractersticas da estratgia de medio e, principalmente, com aqueles aspectos, discutidos anteriormente, associados ao nmero de pontos tomados e distribuio deles sobre a superfcie da pea (Hocken et al., 1993; e Phillips, 1995). O peso das peas tambm inuencia o resultado das medies com MM3C. A posio e a montagem da pea no desempeno causam deformaes na estrutura da mquina, cuja forma e grandeza dependem do tipo e do tamanho da prpria MM3C. Como ocorre com as deformaes causadas pelo peso prprio dos componentes mveis da mquina, as deformaes causadas pelo peso das
50
Dezembro 2000
peas se transformam em modicaes dos pontos coordenados (Cardoza, 1995). A rigidez do desempeno e dos elementos estruturais das mquinas , portanto, um fator determinante da grandeza desses erros, mas, em geral, existem algumas formas de evit-los ou diminu-los. A inuncia da rugosidade da superfcie das peas pode ser diminuda pelo uso de uma ponta com dimetro adequado. Existem estudos que vinculam o tamanho do dimetro da ponta da sonda ao valor de cut-off (um dos parmetros adotados na medio de rugosidade) para estabelecer o limite mximo de nmeros de pontos necessrios a uma medio precisa dos erros de forma (Anbari & Trumpold, 1989). Para eliminar a inuncia do peso da pea nos resultados da medio, podem ser usadas diferentes tcnicas de reverso (Estler, 1985; e Evans et al., 1996).
ERROS INDUZIDOS TERMICAMENTE
Embora os efeitos trmicos em uma MM3C sejam muito menores do que em mquinas-ferramentas, em razo da ausncia de foras de corte e de motores potentes (Hocken, 1980), a segunda fonte de erros mais importante em uma mquina de medir so as mudanas e os gradientes de temperatura. Segundo Bryan (1995), a compensao, via programa computacional, dos erros geomtricos torna as MM3C to precisas quanto os instrumentos usados para levantar seus mapas de erros. O limite dessa correo a repetibilidade, cuja causa1 mais relevante so as mudanas de temperatura. Mesmo que, na maioria das vezes, as MM3C sejam usadas em ambientes com temperatura controlada (20C), a temperatura ambiente e, conseqentemente, a temperatura da mquina e da pea a ser medida podem variar. Essas variaes derivam de diversas fontes e provocam os chamados erros trmicos, que, segundo Hocken (1993), podem ser do tipo e grandeza daqueles resultantes das imperfeies da geometria da mquina. As principais fontes de erros trmicos para MM3C esto resumidas a seguir:
1 Existem outras causas para a repetibilidade: histerese, sujeira, vibraes, variaes no fornecimento de ar etc.
inuncia do ambiente depende da existncia ou no de um sistema de controle de temperatura. A temperatura ambiente pode variar em funo da presena de lmpadas acessas, da temperatura externa e da proximidade do calor gerado por outras mquinas ou instrumentos; pessoas o calor das pessoas prximas mquina e a manipulao desta e das peas sem o devido isolamento trmico provocam variaes de temperatura na pea e na mquina; memria trmica quando ocorre uma mudana no ambiente, cada elemento de um sistema de medio necessita de um perodo de tempo diferente para esquecer as condies ambientais anteriores. Os elementos estruturais de uma MM3C, suas escalas e as peas a serem medidas por ela podem ser de materiais diferentes e, portanto, possuem coecientes de expanso trmica tambm diferentes. Isso signica que elas entram em equilbrio trmico com o ambiente em intervalos de tempo diferentes, durante os quais modicam temporariamente suas respectivas geometrias; calor gerado pela prpria MM3C de forma geral, as MM3C geram um mnimo de calor interno (Hocken, 1980; e Bryan, 1995). O uso de mancais aerostticos elimina a maior parte dos atritos e os motores usados nas mquinas automatizadas no so potentes. O calor gerado por essas fontes de dois tipos: temperaturas uniformes diferentes de 20C e temperaturas no uniformes (Bryan, 1995; e Vieira Sato, 1998). Das fontes anteriormente enunciadas, a nica que pode gerar temperaturas uniformes o ambiente. O padro de comprimento denido para uma temperatura de referncia de 20C. Portanto, os elementos das mquinas, as escalas e as peas fabricadas de materiais com coecientes de expanso trmica diferentes tm suas dimenses denidas para essa temperatura e, quando submetidos a outras temperaturas, se expandem de formas diferentes, provocando os denominados erros de expanso diferencial (nominal differential expansion-UNDE). Os erros de expanso diferencial podem ser quase que totalmente corrigidos e existem procedimentos gerais normalizados para a sua correo (ANSI/ASME Standard
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
51
B89.6.2, 1973; e ANSI/ASME B89.4.1 itens 3.1, 3.2, 4.1 e 4.2, 1997). Entretanto, os coecientes de expanso trmica usados nos clculos so, geralmente, valores tabelados que no correspondem exatamente aos coecientes atuais. As diferenas so causadas por variaes inevitveis dos materiais, sofridas durante o processo de fabricao de qualquer pea. Os efeitos dessas diferenas so considerados no clculo da incerteza da expanso diferencial (uncertainty of nominal differential expansion-UNDE), denida pela ANSI/ASME Standard B89.6.2 de 1973 como a soma das incertezas da expanso nominal da pea e do padro (escala). As outras trs fontes de erros trmicos mencionadas geram temperaturas no uniformes: gradientes e variaes de temperatura. Qualquer mudana na temperatura do ambiente altera as dimenses da estrutura da mquina e de suas escalas, assim como da pea. No entanto, as mudanas de temperatura ocorridas no espao imediato ao redor da mquina e da pea so chamadas de gradientes trmicos ou efeitos estticos (Bryan, 1995) e causam expanses signicativamente diferentes nas diversas partes de cada um dos elementos da mquina e da pea. Mudanas grandes e rpidas de temperatura provocam exes nos elementos das mquinas em razo de a resposta nas partes nas ser mais rpida do que nas partes grossas. O uso de sistemas de controle de temperatura que faam circular o ar rapidamente, como tambm de materiais sucientemente homogneos quanto a suas propriedades de expanso trmica minimiza ou permite controlar de certa forma os efeitos dos gradientes de temperatura (Bryan, 1995; e Genest, 1997). Porm, segundo a ANSI/ASME Standard B89.6.2 - 1973, revisada em 1979, no existe uma formulao geral para estimar os efeitos desses gradientes. A anlise das variaes de temperatura muito mais complexa do que a dos gradientes. Vieira Sato (1998) dene as variaes de temperatura como a diferena do gradiente de temperatura em determinado ponto da mquina ou da pea com relao ao gradiente do estado inicial, quando todo o sistema est temperatura ambiente. Contudo, sabe-se que, quando uma mquina opera a temperaturas diferentes de 20C, tais correes no elimi-
nam 100% dos erros trmicos. O ndice de erro trmico (thermal error indexTEI), denido na norma anteriormente mencionada, proporciona uma estimativa do erro trmico geral como sendo uma porcentagem do erro total permitido. Segundo Balsamo et al. (1990), a compensao dos erros trmicos com programas computacionais faz sentido, somente, quando requerida uma grande acuracidade. Esse autor dene e resume as condies ambientais razoveis, que minimizam os efeitos trmicos presentes em uma medio com MM3C: 1. temperatura mdia igual a 20C; 2. variao de temperatura menor que 2C; 3. gradiente de temperatura ao longo de qualquer direo menor que 2C/m; 4. variaes de temperatura no tempo que proporcionem condies quase estacionrias.
Erros Dinmicos
Nas mquinas de medir a trs coordenadas, os efeitos dinmicos so menores porque as foras envolvidas na medio so muito pequenas e, geralmente, os movimentos so lentos (Hocken, 1980). Na prtica, entretanto, reconhece-se que a acuracidade das MM3C especialmente sensvel s vibraes externas e internas (Ni, 1995). Fora do laboratrio, vrias fontes de vibraes podem afetar as MM3C; entre as mais comuns encontram-se as mquinas-ferramentas, os compressores de ar, equipamentos de ventilao, rodovias e ferrovias. A forma mais efetiva de minimizar o efeito das vibraes nas MM3C controlar suas prprias fontes, isolando-as. Por exemplo, pode-se aumentar a distncia entre uma mquina-ferramenta e a mquina de medir, ou isolar a mquina-ferramenta em sua base. Mas isso nem sempre possvel e, usualmente, apesar de ser menos eciente, isola-se a MM3C, apoiando-a em suportes com isolamento externo de vibrao (Ni, 1995). Mesmo assim, impossvel obter uma fundao totalmente isenta da inuncia das vibraes. Torna-se ento necessrio garantir que o resduo ainda presente das vibraes esteja sob os critrios do fabricante da mquina de medir. Algumas normas tcnicas internacionais sugerem testes para analisar as vibraes nas MM3C (ver, entre outras, BS
52
Dezembro 2000
6808 Part 3, 1989; e ANSI/ASME B89.4.1, 1997). Por outro lado, sabe-se que as sondas usadas nas MM3C so, especialmente, sensveis a inuncias dinmicas (inclusive quando a velocidade de movimentao baixa), embora pouco tenha sido publicado a respeito. Algumas pesquisas bastante recentes estudam as limitaes das sondas em relao ao seu comportamento sob inuncias dinmicas (Van Vliet & Schllekens, 1996) e propem modelos que possibilitam, em certa medida, a compensao dos erros resultantes dessas limitaes (Weekers & Schellekens, 1995; e Mu & Ngoi, 1999).
OUTROS FATORES QUE AFETAM O DESEMPENHO DAS MM3C
A umidade, a presso atmosfrica, o sistema que fornece a energia eltrica, assim como a qualidade do ar comprimido, todos esses so fatores externos cujo comportamento tambm inuencia o desempenho das MM3C. Em geral, para todos eles existem especicaes que, se respeitadas, eliminam ou, pelo menos, diminuem em grande parte os seus efeitos sobre o desempenho das mquinas de medir.
CONCLUSES
O estudo da literatura existente sobre MM3C mostrou que no existem at o momento procedimentos internacionalmente aceitos, por usurios e fabricantes, para avaliar o seu desempenho metrolgico. Em geral, ainda no possvel estabelecer uma cadeia metrolgica para ns de rastreabilidade, requisito esse de importncia vital para que se tenha conabilidade nas medies executadas. As especicaes e normas existentes (ver, entre outras, VDI/ VDE 2.617, 1986-1989; JIS B 7.440, 1987; CMMA, 1989; BS 6.808, 1989; ISO/CD 10.360-2, 1993; e ANSI/ASME B89.4.1, 1997) propem Testes de Desempenho baseados na medio de artefatos-padro em um nmero limitado de posies dentro do volume de trabalho de uma mquina. Os parmetros de avaliao obtidos a partir desses testes fornecem informao sobre alguns aspectos da capacidade de uma mquina de medir, mas, de forma muito geral ou conservadora, sobre-
estimando na maioria das vezes os seus erros. Alm disso, tais testes garantem rastreabilidade somente para as condies de avaliao em que so realizados e para peas idnticas ao padro utilizado. Qualquer mudana das condies do teste por exemplo, na orientao da pea no volume de trabalho impede a rastreabilidade, assim como as variaes na geometria das peas implicam diretamente uma ausncia de vnculo com a cadeia de dimenses rastreveis. Na literatura, a abordagem metrologicamente correta para estabelecer a rastreabilidade das medidas feitas com mquinas de medir a trs coordenadas ao metro padro chamada de princpio do comparador. Esse princpio pressupe a medio de uma pea idntica s peas que sero inspecionadas, nas mesmas condies e do mesmo modo em que se realiza a inspeo (Swyt, 1995; e Piratelli, 1998). Porm, impraticvel dispor de uma peapadro para cada pea possvel de ser medida em uma MM3C. Na busca de uma alternativa vivel para a aplicao do princpio do comparador, surgiram pesquisas envolvendo modelos matemticos, cuja implementao chamada de Mquina Virtual de Medir a Trs Coordenadas. A partir dos erros volumtricos das mquinas, eles tentam simular o seu comportamento metrolgico em diferentes operaes de medio (Kunzmann, 1993; Schwenke et al., 1994; e Cardoza, 1995). As propostas mais interessantes dessa abordagem diferem, principalmente, no mtodo utilizado para calibrar os erros individuais da mquina de medir e no modelo que os combina para gerar seu mapa de erros volumtricos. Finalmente, nenhuma das propostas estudadas, especicadas em normas ou no, para a avaliao do desempenho metrolgico de MM3C mostra, de forma explcita, o clculo da incerteza de medio das diferentes medies. Na prtica, tanto os fabricantes como os usurios utilizam os mais variados critrios para avaliar o desempenho e a incerteza das MM3C (Knapp et al., 1991; e Swyt 1995). Isso permite concluir que existem ainda muitas lacunas no desenvolvimento tcnico-cientco relativo s formas de testes para essas mquinas, a partir das quais seja possvel extrair as caractersticas
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
53
que determinam seu desempenho e garantem sua rastreabilidade.
Agradecimentos Os autores agradecem FAPESP pelo suporte nanceiro (94/5765-2; 96/5961-1).
REFERNCIAS BIBLIOGRFICAS
ANBARI, N. & TRUMPOLD, H. The inuence of surface roughness in dependence of the probe ball radius measuring the actual size. CIRP Sc. Tech. Comm. Report (Surface Metrology), 1989. ANSI/ASME B89.4.1 (formerly ANSI/ASME B89.1.12M): Methods for performance evaluation of coordinate measuring machines, 1997. ANSI/ASME Standard B89.6.2: Temperature and Humidity Environment for Dimensional Inspection, 1973. BALSAMO, A.; MARQUES, D. & SARTORI, S. A method for thermal deformation corrections of CMMs. Annals of the CIRP , 1990. BELFORTE, G.S. et al. Coordinate Measuring Machines and Machine Tools Selfcalibration and Error Correction. Annals of the CIRP , 36 (1), 1987. BOSCH, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. BOURDET, P .; LARTIGUE, C. & LEVEAUX, F. Effects of data point distribution and mathematical model on nding the bestt sphere to data. Precision Engineering, 15 (3): 150-157, July 1993. BRYAN, J.B. Temperature Fundamentals. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. BS 6808 Parts 1-3: British Standard Coordinate Measuring Machines, 1989. BURDEKIN, M. & VOUTSADOPOULOS, C. Computer aided calibration of the geometric errors of multi-axis coordinate measuring machines. Proc. Instn. Mech. Engrs., 195: 231-239, 1981. CARDOZA, J.A.S. Mquinas Virtuais de Medir a Trs Coordenadas. So Carlos, 1995. [Tese de doutorado, EESC/USP]. CASKEY, G. et al. Sampling Techniques for Coordinate Measuring Machines. Proc. of the NSF Conference, 1991. CIRP STC Me Working Party on 3D.A proposal for dening and specifying the dimensional uncertainty of multi-axis measuring machines. Annals of the CIRP , 27 (2), 1978. CMMA-Coordinate Measuring Machines Manufacturing Association. CMMA - Accuracy Specication for Coordinate Measuring Machines, London, 1989. COY, J. Sampling error for co-ordinate measurement. Proceedings of the 28thInternational MATADOR Conference, pp. 481489, Manchester, April 1990. De NIJS, PR-NOME et al. Modeling of a coordinate measuring machine for the analysis of its dynamic behavior. Annals of the CIRP , 37 (1), 1988. Di GIACOMO, B. Computer aided calibration and hybrid compensation of geometric errors in coordinate measuring machines. Manchester, 1986. [Ph.D. Thesis, Institute of Science and Technology/University of Manchester]. EDWORTH, R. & WILHELM, R.G. Adaptive sampling for coordinate metrology. Precision Engineering, 23: 144-154, 1999. EMERY, J. K. Dimensional Metrology Standardization. Mechanical Engineering, 40-45, 1965. ESTLER, W .T. Calibration and use of optical straightedges in the metrology of precision machines, Optical Engineering, 24 (3): 372-379, May/June 1985. ESTLER, W .T. et al. Practical Aspects of touch-trigger probe error compensation. Precision Engineering, 21: 1-17, 1997. ____________. Error compensation for CMM touch-trigger probes. Precision Engineering, 19: 85-97, 1996. EVANS, C.; HOCKEN, R. & ESTLER, W .T. Self-Calibration: Reversal, Redundancy, Error Separation and Absolute Testing. Annals of the CIRP , 45 (2), 1996. GENEST, D. Thermal Effects: understanding their causes can minimize their inuence on precision measurement. Mfg.The Brown&Sharpe Publication of Precision Measurement, v. 4, issue 2, 1997. HARVIE, A. Factors affecting component measurement on coordinate measuring machine. Precision Engineering, 18 (1): 1318, 1986. HOCKEN, R. Technology of Machine Tool, v. 5: Machine Tool Accuracy. Lawrence Livermore Laboratory/Univ. of California, 1980. HOCKEN, R.; RAJA, J. & BABU, U. Sampling Issues in Coordinate Metrology. Mfg. Rev., Dec. 1993. HOCKEN, R. et al. Three Dimensional Metrology. Annals of the CIRP, 26 (2): 403-408, 1977. ISO/CD 10.360-2: Methods for the Assessment of the Performance and Verication of Co-ordinate Measuring Machines, 1993. JIS B 7440: Test Code for Accuracy of Coordinate Measuring Machines, 1987.
54
Dezembro 2000
KNAPP ,W .; TSCHUDI, U. & BUCHER, A. Comparison of Different Artifacts for Interim coordinate measuring machine checking: a report from the Swiss Standard Committee. Precision Engineering, 13 (4): 277-281, 1991. KRECJI, J.V . Application Software. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. KUNZMANN, H.; TRAPET, E. & WLDELE, F. Concept for the Traceability of Measurements with Coordinate Measuring Machines. 7th Int. Precision Eng. Seminar, Kobe, 1993. KUNZMANN, H; WLDELE, F & NI, J. Accuracy Enhancement. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. MACHIREDDY, R.K.; HARI, J. & HOCKEN, R. Sampling Techniques for Measurement of the Plane-Surface Using a Coordinate Measuring Machine. National. Des. Engrg. Conference. ASME, 1993. MARTINEZ ORREGO, R.M. Um mtodo de calibrao direta para mquinas de medir a trs coordenadas. So Carlos, 1999. [Tese de doutorado, EESC/USP]. MU, Y.H. & NGOI, K.A. Dynamic Error Compensation of Coordinate Measuring Machines for High-Speed Measurement. Int. J. of Advanced manufacturing Technology, 5 (11): 810-814, 1999. NI, J. Environmental Control. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. NI, J. & WLDELE, F. Coordinate Measuring Machines. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. ODAYAPPAN, O. Development of Methodologies for Measurement of circles on a Coordinate Measuring Machine. Charlotte, 1992. [Master Thesis, UNC Charlotte]. PAHK, H.; KIM, J. & LEE, K. Integrated compensation system for errors introduced by measurement probe and machine geometry in commercial CMMs. International Journal of Machine Tools Manufacturer, 36 (9): 1.045-1.058, 1996. PAHK, H.J.; BURDEKIN, M. & PEGGS, G.N. Development of Virtual Measuring Machine Incorporating Probe Error. Proceedings of the Institution of Mechanical Engineers, part B: Journal of Engineering Manufacture, 212 (issue B7): 533-548, 1998. PEGGS, G.N. Traceability for co-ordinate measurement technology. 27th International MATADOR Conference, Manchester, pp. 463-468, 1990. PHILLIPS, S.D. Performance Evaluations. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. PHILLIPS, S.D. et al. A Study on the Interaction of Form Error and Sampling Strategy for Spheres. NIST Journal of Research, 1994. PIRATELLI, A. Mtodo para avaliao do desempenho de mquinas de medir a trs coordenadas atravs de planejamento de experimento. So Carlos, 1998. [Tese de doutorado, EESC/USP]. PORTA, C. & WLDELE, F. Testing of three coordinate measuring machine evaluation algorithms. Report EUR 10909 EN, CEC, 1986. PRODUCTIONS POINT: Performance Evaluation of coordinate measuring machines. Precision Engineering, 5 (3), July/1983. SARTORI, S. Geometric error measurement and compensation of machines. Annals of the CIRP , 44 (2), 1995. SCHELLEKENS, P . & ROSIELLE, N. Design for precision: currents status and trends. Annals of the CIRP , 47 (1): 557-586, 1998. SCHWENKE, H. et al. Experience with the Error Assessment of Coordinate Measurements by Simulations, Proceedings of the 3rd International Conference on Ultraprecision in Manufacturing Engineering. Aachen, pp. 370-373, 1994. SWYT, D.A. The international standard of length. In: Bosch, J.A. Coordinate Measuring Machines and Systems. New York: Marcel Dekker, Inc., 1995. TRUMPOLD, H. Grundlagen der Lngenprftechnik-Eine Einfhrung. Fachb. Leipzig, 1984. VAN VLIET, W .P . & SCHELLEKENS, P .H.J. Accuracy Limitations of Fast Mechanical Probing. Annals of the CIRP , 45 (1): 483487, 1996. ______________. Development of a fast mechanical probe for coordinate measuring machines. Precision Engineering, 22 (3): 141-152, 1998. VDI/VDE 2617 Parts 1-4: Accuracy of Coordinate Measuring Machine. Dsseldorf, 1986-89. VIEIRA SATO, D.P . Uma contribuio ao modelo de sintetizao de erros em mquinas ferramentas. So Carlos, 1998. [Tese de doutorado, EESC/USP]. WECKENMANN, A. et al. Functionality-oriented evaluation and sampling strategy in coordinate metrology. Precision Engineering, 17: 244-252, 1995.
REVISTA DE CINCIA & TECNOLOGIA V. 8, N 16 pp. 43-56
55
_________________. The Inuence of Measurement Strategy on the Uncertainty of CMM-Measurements. Annals of the CIRP , 47 (1): 451-454, 1998. WEEKERS, W .G. & SCHELLENKENS, P .H.J. Assessment of Dynamics Errors of CMMs for fast Probing. Annals of the CIRP , 44 (1): 469-474, 1995. ZHANG, G. et al. Error compensation of coordinate measuring machines. Annals of the CIRP , 34 (1): 445-448, 1985.
56
Dezembro 2000
Anda mungkin juga menyukai
- Projeto Do Forno de Fundição PDFDokumen13 halamanProjeto Do Forno de Fundição PDFKelly TurnerBelum ada peringkat
- Cad C3 Teoria 1serie 3bim MatematicaDokumen52 halamanCad C3 Teoria 1serie 3bim MatematicaRenato Severo67% (3)
- Set2012 Apostila Te CorteDokumen82 halamanSet2012 Apostila Te CorteWelly DiasBelum ada peringkat
- Check-List Programacao CNCDokumen1 halamanCheck-List Programacao CNCManolo Gipiela100% (1)
- Ligas de Aluminio FundidasDokumen19 halamanLigas de Aluminio Fundidasjoubertporto100% (2)
- Modelos de Relatorios 2014Dokumen6 halamanModelos de Relatorios 2014ÂngelaSilvaBelum ada peringkat
- Atividades 1 Ano PORTUGUS MATEMTICA GEO HISTRIA E CINCIAS 1 5 SemanaDokumen10 halamanAtividades 1 Ano PORTUGUS MATEMTICA GEO HISTRIA E CINCIAS 1 5 SemanaCamila Cordeiro Motta100% (2)
- Geometria EsféricaDokumen63 halamanGeometria Esféricaosnildo carvalhoBelum ada peringkat
- Memorial de CálculosDokumen17 halamanMemorial de CálculosManolo GipielaBelum ada peringkat
- Aula 03 - Moldes PDFDokumen48 halamanAula 03 - Moldes PDFRonaldhosanaBelum ada peringkat
- Tipos de Fornos Mais ComunsDokumen8 halamanTipos de Fornos Mais ComunsManolo GipielaBelum ada peringkat
- Armação Estamparia Tecnica Lay OffDokumen257 halamanArmação Estamparia Tecnica Lay OffManolo GipielaBelum ada peringkat
- Fundição em Moldes Refratários e Moldes Metálicos PDFDokumen16 halamanFundição em Moldes Refratários e Moldes Metálicos PDFMelkoBelum ada peringkat
- Ceramic A PortuguesDokumen73 halamanCeramic A PortuguesMaya SatoBelum ada peringkat
- Fundição em Moldes Refratários e Moldes MetálicosDokumen47 halamanFundição em Moldes Refratários e Moldes MetálicosManolo GipielaBelum ada peringkat
- MM1999 NV PDFDokumen10 halamanMM1999 NV PDFManolo GipielaBelum ada peringkat
- Laminadores IndustriaisDokumen29 halamanLaminadores IndustriaisManolo GipielaBelum ada peringkat
- Influencia Da GeometriaDokumen10 halamanInfluencia Da GeometriaManolo GipielaBelum ada peringkat
- Solidificação Na Fundição de LingotesDokumen5 halamanSolidificação Na Fundição de LingotesManolo GipielaBelum ada peringkat
- Dis Positivo SDokumen13 halamanDis Positivo SManolo GipielaBelum ada peringkat
- 1517 7076 Rmat 21 04 01094Dokumen11 halaman1517 7076 Rmat 21 04 01094Manolo GipielaBelum ada peringkat
- Ferra Ment ADokumen1 halamanFerra Ment AManolo GipielaBelum ada peringkat
- RQ-Manual Segurança Prensas e SimilaresDokumen134 halamanRQ-Manual Segurança Prensas e SimilaresWanderley Terci EstevesBelum ada peringkat
- MM1999 NVDokumen10 halamanMM1999 NVManolo GipielaBelum ada peringkat
- Capa Cadcam2Dokumen3 halamanCapa Cadcam2Manolo GipielaBelum ada peringkat
- Capitulo 7 ADokumen14 halamanCapitulo 7 AManolo GipielaBelum ada peringkat
- Dispositivo FixacaoDokumen1 halamanDispositivo FixacaoManolo GipielaBelum ada peringkat
- OperaçãoDokumen1 halamanOperaçãoManolo GipielaBelum ada peringkat
- lmcm1 Aula8Dokumen14 halamanlmcm1 Aula8Manolo GipielaBelum ada peringkat
- Materia PrimaDokumen1 halamanMateria PrimaManolo GipielaBelum ada peringkat
- Roteiro Trabalho CNCDokumen1 halamanRoteiro Trabalho CNCManolo GipielaBelum ada peringkat
- Roteiro EMCODokumen4 halamanRoteiro EMCOManolo GipielaBelum ada peringkat
- Conem04 PresetDokumen10 halamanConem04 PresetManolo GipielaBelum ada peringkat
- Apresentação CNCDokumen89 halamanApresentação CNCManolo GipielaBelum ada peringkat
- 3.2 - Cap 4 - Estruturas Condicionais e de SeleçãoDokumen20 halaman3.2 - Cap 4 - Estruturas Condicionais e de SeleçãoMVT EDITION BRBelum ada peringkat
- Programação LinearDokumen14 halamanProgramação LinearFábio CarvalhoBelum ada peringkat
- Método Dos Mínimos QuadradosDokumen9 halamanMétodo Dos Mínimos QuadradosRodrigues Almeida GuenhaBelum ada peringkat
- Análise DimensionalDokumen16 halamanAnálise DimensionalAllan MartinBelum ada peringkat
- Sistemas de Coordenadas No TikZDokumen13 halamanSistemas de Coordenadas No TikZRegis da Silva100% (1)
- Exame 1 Chamada - 30.01.2018Dokumen1 halamanExame 1 Chamada - 30.01.2018moreno marshallBelum ada peringkat
- Delta DiracDokumen3 halamanDelta DiracElisa DardengoBelum ada peringkat
- 2014-1 Thiago MPA06839 PDFDokumen3 halaman2014-1 Thiago MPA06839 PDFValquíriaBelum ada peringkat
- Avaliação2 Santa SetimoDokumen2 halamanAvaliação2 Santa SetimoMARIA DO CARMOBelum ada peringkat
- Artigo DiscalculiaDokumen11 halamanArtigo DiscalculiaRaquel Catarina AlmeidaBelum ada peringkat
- Cof Aula 041Dokumen40 halamanCof Aula 041Lucas Melo0% (1)
- 5.0 - Progressão Geométrica - Soma Dos N Termos de Uma P.G.Dokumen8 halaman5.0 - Progressão Geométrica - Soma Dos N Termos de Uma P.G.joaovictorribaczkiBelum ada peringkat
- Exercício 1 e 2 - Encontro 2 - Ciclo 7Dokumen5 halamanExercício 1 e 2 - Encontro 2 - Ciclo 7vitoriaflima2007Belum ada peringkat
- Logotipo e Logomarca - EmentaDokumen2 halamanLogotipo e Logomarca - EmentaMaria Cláudia SantosBelum ada peringkat
- Matemática Aplicada A Administração - TrabDokumen11 halamanMatemática Aplicada A Administração - TrabBertoBelum ada peringkat
- Aula - 4 - Resistividade AparenteDokumen18 halamanAula - 4 - Resistividade AparenteLuciano Paulo da SilvaBelum ada peringkat
- 2017-18 Funcoes TrigonometriaDokumen2 halaman2017-18 Funcoes TrigonometriaAprenderaEstudarBelum ada peringkat
- Glossário de EstatísticaDokumen7 halamanGlossário de EstatísticaDigno da MataBelum ada peringkat
- Lista GA1Dokumen2 halamanLista GA1DIONES SILVA RODRIGUESBelum ada peringkat
- Lista Exercicios 02Dokumen2 halamanLista Exercicios 02Teo JavaBelum ada peringkat
- M4 Tutor Integrais TriplasDokumen14 halamanM4 Tutor Integrais TriplasFilipe CarvalhoBelum ada peringkat
- Lista 1.1Dokumen3 halamanLista 1.1シ꧁ʟɪᴠɪᴀ꧂Belum ada peringkat
- 2015-Diss-Métodos de Monte Carlo Hamiltoniano Na Inferência Bayesiana Não-Paramétrica de Valores Extremos - (MarceloHartmann)Dokumen95 halaman2015-Diss-Métodos de Monte Carlo Hamiltoniano Na Inferência Bayesiana Não-Paramétrica de Valores Extremos - (MarceloHartmann)sssBelum ada peringkat
- Mate Ma Tic A 1Dokumen42 halamanMate Ma Tic A 1filipeeliteBelum ada peringkat
- 1103 Ensino de MatematicaDokumen176 halaman1103 Ensino de MatematicaFábio FerlaBelum ada peringkat
- Matematica Discreta Unidade 02 Profmat 2012Dokumen18 halamanMatematica Discreta Unidade 02 Profmat 2012anderson_omsBelum ada peringkat