Anda mungkin juga menyukai
- SCA ALKO Case Study ReportDokumen4 halamanSCA ALKO Case Study ReportRavidas KRBelum ada peringkat
- 2020 YISS - 4 Week - KOREAN (1) - Dongsook KimDokumen2 halaman2020 YISS - 4 Week - KOREAN (1) - Dongsook KimZia SilverBelum ada peringkat
- 2020 YISS - 4 Week - KOREAN (1) - Dongsook KimDokumen2 halaman2020 YISS - 4 Week - KOREAN (1) - Dongsook KimZia SilverBelum ada peringkat
- Applications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Dokumen1 halamanApplications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Zia Silver100% (1)
- Applications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Dokumen1 halamanApplications & Interpretation - 1 Page Formula Sheet: IB Mathematics SL & HL - First Examinations 2021Zia Silver100% (1)
- Practice Test E Section 2 Structure and Written ExpressionDokumen8 halamanPractice Test E Section 2 Structure and Written ExpressionZia SilverBelum ada peringkat
- Casting Procedures and Defects GuideDokumen91 halamanCasting Procedures and Defects GuideJitender Reddy0% (1)
- Origins and Rise of the Elite Janissary CorpsDokumen11 halamanOrigins and Rise of the Elite Janissary CorpsScottie GreenBelum ada peringkat
- Function: 'Sor Error: Matrix Dimensions and Vector Dimension Not Compatible'Dokumen2 halamanFunction: 'Sor Error: Matrix Dimensions and Vector Dimension Not Compatible'ozbakBelum ada peringkat
- MATLAB Lab Report for Computational LabDokumen57 halamanMATLAB Lab Report for Computational LabRushi GoreBelum ada peringkat
- This Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)Dokumen5 halamanThis Function Solves Linear Equation Systems Such As Ax B Using SOR Method. Sor (A, X, B, W, Max - It, Tol)YohannesBelum ada peringkat
- Gauss-Seidel Itration MethodDokumen2 halamanGauss-Seidel Itration MethodNayli AthirahBelum ada peringkat
- UntitledDokumen6 halamanUntitledmaremqlo54Belum ada peringkat
- Matlab LMS & RLS Codes for Noise CancellationDokumen8 halamanMatlab LMS & RLS Codes for Noise Cancellationtvr123Belum ada peringkat
- Math 542 Numerical Solutions of Differential EquationsDokumen34 halamanMath 542 Numerical Solutions of Differential EquationsTaner YenerBelum ada peringkat
- SOR Method MATLAB Code for Linear SystemsDokumen5 halamanSOR Method MATLAB Code for Linear SystemsYohannesBelum ada peringkat
- Dept. of Mechanical Engg. Dronacharya College of Engg. AntcDokumen18 halamanDept. of Mechanical Engg. Dronacharya College of Engg. AntcRahil AndleebBelum ada peringkat
- Matlab Practice DSP LabDokumen10 halamanMatlab Practice DSP LabPrudhvi MunagalaBelum ada peringkat
- CchelpDokumen119 halamanCchelpLaco tangara JhuniorBelum ada peringkat
- MATLAB Fundamentals for Computer-Aided ManufacturingDokumen47 halamanMATLAB Fundamentals for Computer-Aided ManufacturingAyub PadaniaBelum ada peringkat
- MATLAB Source Codes for Image Thresholding and Edge DetectionDokumen10 halamanMATLAB Source Codes for Image Thresholding and Edge DetectionMohammed AlmalkiBelum ada peringkat
- Maximum Volume Rectangle OptimizationDokumen16 halamanMaximum Volume Rectangle OptimizationNeeraj YadavBelum ada peringkat
- Linear ConvolutionDokumen17 halamanLinear ConvolutionRahul DeshpandeBelum ada peringkat
- NUMERICAL METHODS (PRACTICALDokumen15 halamanNUMERICAL METHODS (PRACTICALUmer MasoodBelum ada peringkat
- M.E CS-1 Lab ManualDokumen78 halamanM.E CS-1 Lab Manualselvaece2010Belum ada peringkat
- Matlab Tips and Tricks for Processing Signals and ImagesDokumen14 halamanMatlab Tips and Tricks for Processing Signals and Imagesfilip100Belum ada peringkat
- Lab 04 Eigen Value Partial Pivoting and Elimination PDFDokumen12 halamanLab 04 Eigen Value Partial Pivoting and Elimination PDFUmair Ali ShahBelum ada peringkat
- Gaussian mixture model clustering and classificationDokumen28 halamanGaussian mixture model clustering and classificationKelbie DavidsonBelum ada peringkat
- Matlab ExamDokumen25 halamanMatlab ExamAliceAlormenuBelum ada peringkat
- 21 Eng 143Dokumen19 halaman21 Eng 143Udana ThenuwaraBelum ada peringkat
- Gauss SeidelDokumen1 halamanGauss SeidelLoginmodeBelum ada peringkat
- Matlab Program For Gauss Elimination Method With Partial PivotingDokumen6 halamanMatlab Program For Gauss Elimination Method With Partial PivotingDinesh JangraBelum ada peringkat
- Example From SlidesDokumen17 halamanExample From SlidesShintaBelum ada peringkat
- Numerical Methods and Probability AssignmentDokumen5 halamanNumerical Methods and Probability AssignmentMinal FatymaBelum ada peringkat
- Matlab HW PDFDokumen3 halamanMatlab HW PDFMohammed AbdulnaserBelum ada peringkat
- Linear System of Equations: Gauss Elimination MethodDokumen12 halamanLinear System of Equations: Gauss Elimination MethodsrkhougangBelum ada peringkat
- The Jacobi Method: Susanne Brenner and Li-Yeng Sung (Modified by Douglas B. Meade) Department of MathematicsDokumen2 halamanThe Jacobi Method: Susanne Brenner and Li-Yeng Sung (Modified by Douglas B. Meade) Department of MathematicsjimakosjpBelum ada peringkat
- Implementation in Matlab of Differential EvolutionDokumen26 halamanImplementation in Matlab of Differential EvolutionJuan Alex Arequipa ChecaBelum ada peringkat
- Fundamental Signal Processing ExerciseDokumen7 halamanFundamental Signal Processing ExerciseAdang PriantoBelum ada peringkat
- Wxmaxima File - WXMXDokumen24 halamanWxmaxima File - WXMXSneha KBBelum ada peringkat
- Matlab QuestionsDokumen9 halamanMatlab QuestionsNimal_V_Anil_2526100% (2)
- Name: Masood Salik BSEE-14-18 Convergence / Existence of DTFT and Gibbs PhenomenonDokumen5 halamanName: Masood Salik BSEE-14-18 Convergence / Existence of DTFT and Gibbs PhenomenonAmina TabassumBelum ada peringkat
- CME362 Programming AssignmentDokumen15 halamanCME362 Programming AssignmentstonehoffBelum ada peringkat
- Matlab Program For Gauss Elimination MethodDokumen6 halamanMatlab Program For Gauss Elimination MethodDinesh JangraBelum ada peringkat
- Ece503 ps04Dokumen5 halamanEce503 ps04Rushabh MehtaBelum ada peringkat
- Applied Numerical Techniques and Comp. ME-319-E: Lab ManualDokumen0 halamanApplied Numerical Techniques and Comp. ME-319-E: Lab ManualManupriya HasijaBelum ada peringkat
- Komnum UASDokumen8 halamanKomnum UASRusli NurdinBelum ada peringkat
- Matlab Examples AE470Dokumen24 halamanMatlab Examples AE470JonyLopezBelum ada peringkat
- HW #2Dokumen7 halamanHW #2sshanbhagBelum ada peringkat
- Matlab Codes To Be PrintedDokumen3 halamanMatlab Codes To Be PrintedsunilvasudevaBelum ada peringkat
- Guia Nro 06: Sistema de Ecuaciones Directo: FunctionDokumen4 halamanGuia Nro 06: Sistema de Ecuaciones Directo: FunctionMary Saavedra ContrerasBelum ada peringkat
- Appendix B MATLAB® PROGRAMS PDFDokumen16 halamanAppendix B MATLAB® PROGRAMS PDFcassindromeBelum ada peringkat
- 8.integration by Numerical MethodDokumen7 halaman8.integration by Numerical Methodمحمد اسماعيل يوسفBelum ada peringkat
- MathematicsDokumen10 halamanMathematicsJain PradeepBelum ada peringkat
- DSP Lab 1 PDFDokumen10 halamanDSP Lab 1 PDFSaif HassanBelum ada peringkat
- DSP ProgramDokumen118 halamanDSP ProgramSandeep Banerjee100% (1)
- Primer Examen Parcial (1/2016) Programación y Análisis Numérico (PRQ 404)Dokumen4 halamanPrimer Examen Parcial (1/2016) Programación y Análisis Numérico (PRQ 404)CelsoNadinBelum ada peringkat
- Awesomebump V1.0: 1 Height To Normal ConversionDokumen7 halamanAwesomebump V1.0: 1 Height To Normal ConversionAprian Rudina SukmaBelum ada peringkat
- Mean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsDokumen5 halamanMean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsJUVERIA N ZBelum ada peringkat
- DSP Manual 1Dokumen138 halamanDSP Manual 1sunny407Belum ada peringkat
- Assignment 2Dokumen6 halamanAssignment 2Hamza Ahmed WajeehBelum ada peringkat
- Detect pitch using time-domain and frequency-domain algorithmsDokumen12 halamanDetect pitch using time-domain and frequency-domain algorithmshazoorbukhshBelum ada peringkat
- Hmwk01 APAM4300Dokumen14 halamanHmwk01 APAM4300Renzo Alexander Montoya MoralesBelum ada peringkat
- Lecture 5: Wavefront Reconstruction and Prediction: P.r.fraanje@tudelft - NLDokumen136 halamanLecture 5: Wavefront Reconstruction and Prediction: P.r.fraanje@tudelft - NLPhuc PhanBelum ada peringkat
- Nonlinear Control Feedback Linearization Sliding Mode ControlDari EverandNonlinear Control Feedback Linearization Sliding Mode ControlBelum ada peringkat
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Dari EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Penilaian: 2.5 dari 5 bintang2.5/5 (2)
- 2020 YISS - Beginning Korean Language IIDokumen3 halaman2020 YISS - Beginning Korean Language IIZia SilverBelum ada peringkat
- 0580 w14 Ms 23Dokumen4 halaman0580 w14 Ms 23Haider Ali100% (3)
- 2020 YISS - Beginning Korean Language IDokumen3 halaman2020 YISS - Beginning Korean Language IZia SilverBelum ada peringkat
- 0580 w14 Ms 12Dokumen4 halaman0580 w14 Ms 12Haider Ali50% (2)
- 0580 w14 Ms 12Dokumen4 halaman0580 w14 Ms 12Haider Ali50% (2)
- Math HL Formula Booklet 2015 VersionDokumen15 halamanMath HL Formula Booklet 2015 VersionChangBelum ada peringkat
- 2020 YISS - Beginning Korean Language IDokumen3 halaman2020 YISS - Beginning Korean Language IZia SilverBelum ada peringkat
- 0580 w14 Ms 21Dokumen4 halaman0580 w14 Ms 21Haider Ali100% (1)
- 0580 w14 Ms 12Dokumen4 halaman0580 w14 Ms 12Haider Ali50% (2)
- 0580 w14 Ms 21Dokumen4 halaman0580 w14 Ms 21Haider Ali100% (1)
- Silabus Sekolah UI - UXDokumen9 halamanSilabus Sekolah UI - UXMochamad IbnuBelum ada peringkat
- 0580 w14 Ms 23Dokumen4 halaman0580 w14 Ms 23Haider Ali100% (3)
- 0580 w14 Ms 22Dokumen5 halaman0580 w14 Ms 22Haider Ali50% (2)
- 0580 w14 Ms 23Dokumen4 halaman0580 w14 Ms 23Haider Ali100% (3)
- Mathematics 2019: Online SampleDokumen1 halamanMathematics 2019: Online SampleZia SilverBelum ada peringkat
- 0580 w14 Ms 21Dokumen4 halaman0580 w14 Ms 21Haider Ali100% (1)
- IMO2015SLDokumen83 halamanIMO2015SLHimansu Mookherjee100% (1)
- 2012 Natural Sciences Test-421Dokumen14 halaman2012 Natural Sciences Test-421amandashn96Belum ada peringkat
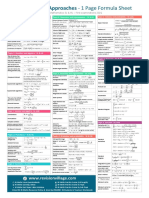
- Analysis and Approaches 1 Page Formula Sheet PDFDokumen1 halamanAnalysis and Approaches 1 Page Formula Sheet PDFZia SilverBelum ada peringkat
- Form Surat Dan Absen CutiDokumen1 halamanForm Surat Dan Absen CutiZia SilverBelum ada peringkat
- Utah Math Graduate Bulletin 2013-2014Dokumen68 halamanUtah Math Graduate Bulletin 2013-2014Zia SilverBelum ada peringkat
- FT MBA Questionnaire Young Leader Scholarship 2014Dokumen1 halamanFT MBA Questionnaire Young Leader Scholarship 2014Zia SilverBelum ada peringkat
- New Text DocumentDokumen1 halamanNew Text DocumentZia SilverBelum ada peringkat
- One-Year Global MBA at World's Largest Business SchoolDokumen64 halamanOne-Year Global MBA at World's Largest Business SchoolZia SilverBelum ada peringkat
- Bali - Bps.go - Id Series Data Tampil Data SeriesDokumen7 halamanBali - Bps.go - Id Series Data Tampil Data SeriesZia SilverBelum ada peringkat
- Borello-Bolted Steel Slip-Critical Connections With Fillers I. PerformanceDokumen10 halamanBorello-Bolted Steel Slip-Critical Connections With Fillers I. PerformanceaykutBelum ada peringkat
- Lecture Ready 01 With Keys and TapescriptsDokumen157 halamanLecture Ready 01 With Keys and TapescriptsBảo Châu VươngBelum ada peringkat
- "Behind The Times: A Look at America's Favorite Crossword," by Helene HovanecDokumen5 halaman"Behind The Times: A Look at America's Favorite Crossword," by Helene HovanecpspuzzlesBelum ada peringkat
- Music 7: Music of Lowlands of LuzonDokumen14 halamanMusic 7: Music of Lowlands of LuzonGhia Cressida HernandezBelum ada peringkat
- Sewage Pumping StationDokumen35 halamanSewage Pumping StationOrchie DavidBelum ada peringkat
- 1.each of The Solids Shown in The Diagram Has The Same MassDokumen12 halaman1.each of The Solids Shown in The Diagram Has The Same MassrehanBelum ada peringkat
- Exercises2 SolutionsDokumen7 halamanExercises2 Solutionspedroagv08Belum ada peringkat
- Rtsa 2012Dokumen7 halamanRtsa 2012Justin RobinsonBelum ada peringkat
- Estimation of Working CapitalDokumen12 halamanEstimation of Working CapitalsnehalgaikwadBelum ada peringkat
- Family Service and Progress Record: Daughter SeptemberDokumen29 halamanFamily Service and Progress Record: Daughter SeptemberKathleen Kae Carmona TanBelum ada peringkat
- Theory of Linear Programming: Standard Form and HistoryDokumen42 halamanTheory of Linear Programming: Standard Form and HistoryJayakumarBelum ada peringkat
- Final Thesis Report YacobDokumen114 halamanFinal Thesis Report YacobAddis GetahunBelum ada peringkat
- Portfolio by Harshit Dhameliya-1Dokumen85 halamanPortfolio by Harshit Dhameliya-1Aniket DhameliyaBelum ada peringkat
- 17BCE0552 Java DA1 PDFDokumen10 halaman17BCE0552 Java DA1 PDFABHIMAYU JENABelum ada peringkat
- 2-Port Antenna Frequency Range Dual Polarization HPBW Adjust. Electr. DTDokumen5 halaman2-Port Antenna Frequency Range Dual Polarization HPBW Adjust. Electr. DTIbrahim JaberBelum ada peringkat
- Intro To Gas DynamicsDokumen8 halamanIntro To Gas DynamicsMSK65Belum ada peringkat
- Riddles For KidsDokumen15 halamanRiddles For KidsAmin Reza100% (8)
- Non Circumvention Non Disclosure Agreement (TERENCE) SGDokumen7 halamanNon Circumvention Non Disclosure Agreement (TERENCE) SGLin ChrisBelum ada peringkat
- TheEconomist 2023 04 01Dokumen297 halamanTheEconomist 2023 04 01Sh FBelum ada peringkat
- Maj. Terry McBurney IndictedDokumen8 halamanMaj. Terry McBurney IndictedUSA TODAY NetworkBelum ada peringkat
- Three-D Failure Criteria Based on Hoek-BrownDokumen5 halamanThree-D Failure Criteria Based on Hoek-BrownLuis Alonso SABelum ada peringkat
- Unit 3 Computer ScienceDokumen3 halamanUnit 3 Computer ScienceradBelum ada peringkat
- Wasserman Chest 1997Dokumen13 halamanWasserman Chest 1997Filip BreskvarBelum ada peringkat
- Conv VersationDokumen4 halamanConv VersationCharmane Barte-MatalaBelum ada peringkat
- Difference Between Text and Discourse: The Agent FactorDokumen4 halamanDifference Between Text and Discourse: The Agent FactorBenjamin Paner100% (1)
- Sharp Ar5731 BrochureDokumen4 halamanSharp Ar5731 Brochureanakraja11Belum ada peringkat
- SEO-Optimized Title for Python Code Output QuestionsDokumen2 halamanSEO-Optimized Title for Python Code Output QuestionsTaru GoelBelum ada peringkat