Anda mungkin juga menyukai
- Brazo Robotico de 5 GLDDokumen15 halamanBrazo Robotico de 5 GLDWALTER MAX MONTAÑO CAMACHOBelum ada peringkat
- Modelo cinemático del brazo robótico gripperDokumen15 halamanModelo cinemático del brazo robótico gripperGordon NorfcothBelum ada peringkat
- 9 Trabajo2Dokumen15 halaman9 Trabajo2Kelly Arrazola SalasBelum ada peringkat
- A1_1723100Dokumen14 halamanA1_1723100Cindy GonzálezBelum ada peringkat
- Cinemática directa e inversa en robots: conceptos y aplicacionesDokumen9 halamanCinemática directa e inversa en robots: conceptos y aplicacionesMARLON EFRAIN LLAMBA LEMABelum ada peringkat
- Cinematica inversa de un robot 4GDLDokumen18 halamanCinematica inversa de un robot 4GDLPaola Maribel GuamanBelum ada peringkat
- Fredy - Chavarro - Fase 3 - Realizar Lluvia de IdeasDokumen19 halamanFredy - Chavarro - Fase 3 - Realizar Lluvia de IdeasJhon Fredy Chavarro RubianoBelum ada peringkat
- Modelo Dinamico 2Dokumen9 halamanModelo Dinamico 2Osmar De La CruzBelum ada peringkat
- Brazo robótico 4 grados de libertadDokumen5 halamanBrazo robótico 4 grados de libertadFernando PatricioBelum ada peringkat
- Invesigacion Sobre Desacolamiento CinematicoDokumen10 halamanInvesigacion Sobre Desacolamiento CinematicoULISES HURTADO TREJOBelum ada peringkat
- Cinemática directa e inversa de robots: modelo de robot cilíndricoDokumen6 halamanCinemática directa e inversa de robots: modelo de robot cilíndricoJader PerezBelum ada peringkat
- El Robot ScaraDokumen8 halamanEl Robot ScaraJordan BenítezBelum ada peringkat
- Brazo Robótico 5GDL Procesos de Vacunacion de Ganado1Dokumen18 halamanBrazo Robótico 5GDL Procesos de Vacunacion de Ganado1Jhoel MedranoBelum ada peringkat
- Modelo Cinemático Directo Del Robot CRS Robotics A465Dokumen29 halamanModelo Cinemático Directo Del Robot CRS Robotics A465FernandoBelum ada peringkat
- Robot EsféricoDokumen17 halamanRobot EsféricoDilan ReinaBelum ada peringkat
- Diseno Mecatronico Estudio y Modelamiento Robot KukaDokumen10 halamanDiseno Mecatronico Estudio y Modelamiento Robot Kukadario mendozaBelum ada peringkat
- ANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100icDokumen18 halamanANÁLISIS CINEMÁTICO DEL ROBOT FANUC ARC MATE 100icJuan Ladino100% (1)
- Control de Engranajes Con ExcelDokumen10 halamanControl de Engranajes Con ExcelAlan JacquetBelum ada peringkat
- U1 Robotica PDFDokumen10 halamanU1 Robotica PDFAlex BanalexBelum ada peringkat
- JIISIC 2007 SierraDokumen7 halamanJIISIC 2007 SierraVeronica Andrade GarciaBelum ada peringkat
- Cinemática Directa InversaDokumen3 halamanCinemática Directa InversaJorge Chimarro AlvearBelum ada peringkat
- Fase3 299011 11Dokumen14 halamanFase3 299011 11William FlorezBelum ada peringkat
- Fase 3 - Camilo PaipillaDokumen9 halamanFase 3 - Camilo PaipillaMiguel Angel Mendigaño ArismendyBelum ada peringkat
- Class 71 Direct KinematicDokumen49 halamanClass 71 Direct KinematicBolito1986Belum ada peringkat
- Configuraciones SingularesDokumen6 halamanConfiguraciones SingularesMiguelAngelJaureguiBelum ada peringkat
- Cinemática del RobotDokumen17 halamanCinemática del RobotxdarthdaverxBelum ada peringkat
- Robotica - Erramientas MatematicasDokumen5 halamanRobotica - Erramientas MatematicasCristian AndrangoBelum ada peringkat
- Cinemática de Un Brazo RobóticoDokumen32 halamanCinemática de Un Brazo RobóticoMadaiBelum ada peringkat
- Poster em ManuelDokumen1 halamanPoster em Manuelemmanuel_htaBelum ada peringkat
- Investigacion U5Dokumen32 halamanInvestigacion U5Jason ClementeBelum ada peringkat
- Cinemática Inversa de Robots ManipuladoresDokumen20 halamanCinemática Inversa de Robots ManipuladoresFidel Andía GuzmánBelum ada peringkat
- Análisis de Un Brazo Robótico Con Tres Grados de LibertadDokumen37 halamanAnálisis de Un Brazo Robótico Con Tres Grados de LibertadMax UhleBelum ada peringkat
- Análisis Cinemático Directo Del Robot RV-2AJ de Mitsubishi Utilizando Teoría de ScrewsDokumen6 halamanAnálisis Cinemático Directo Del Robot RV-2AJ de Mitsubishi Utilizando Teoría de ScrewsNaimersoft SolucionesBelum ada peringkat
- 1er Parcial 2do Taller PDFDokumen2 halaman1er Parcial 2do Taller PDFCristian Bravo MartinezBelum ada peringkat
- Cinemática de RobotsDokumen10 halamanCinemática de RobotsRey ArmandoBelum ada peringkat
- Informe Del Manipulador 1Dokumen36 halamanInforme Del Manipulador 1Brian QuispeBelum ada peringkat
- Cinemática de Robots: Configuraciones y ProgramaciónDokumen6 halamanCinemática de Robots: Configuraciones y Programacióndiana cuellarBelum ada peringkat
- Andres Pardo - AporteDokumen5 halamanAndres Pardo - AporteMiguel Angel Mendigaño ArismendyBelum ada peringkat
- Funciones VectorialesDokumen27 halamanFunciones VectorialesEl rabos :vBelum ada peringkat
- 02 Cinemática Directa e Inversa.Dokumen10 halaman02 Cinemática Directa e Inversa.sistemaelectricoBelum ada peringkat
- Implementación de Simulink en Un Robot Paralelo - RobóticaDokumen26 halamanImplementación de Simulink en Un Robot Paralelo - RobóticaAdrian RicardezBelum ada peringkat
- Grupo - 299011 - 1 - Fase 3Dokumen21 halamanGrupo - 299011 - 1 - Fase 3catalinaBelum ada peringkat
- Cinemática Del Robot PolarDokumen16 halamanCinemática Del Robot PolarERNESTOBelum ada peringkat
- MATLAB (Rotar y Trasladar Funciones 2D y 3D - Version Mejorada)Dokumen52 halamanMATLAB (Rotar y Trasladar Funciones 2D y 3D - Version Mejorada)FIDEL TOMAS MONTEZA ZEVALLOS57% (14)
- ML Cap 5Dokumen85 halamanML Cap 5ChristianZamarripa100% (1)
- Cinematica BioloidDokumen6 halamanCinematica BioloidDaniel Neri RamírezBelum ada peringkat
- Cinematica Directa de Un Robot KukaDokumen19 halamanCinematica Directa de Un Robot Kukavelazquez4marquez4anBelum ada peringkat
- Robotica Control de TrayectoriasDokumen18 halamanRobotica Control de TrayectoriasOSCAR RICARDO MENDEZ SOTOBelum ada peringkat
- DenavitDokumen30 halamanDenavitJose LopezBelum ada peringkat
- 3M Cinematica Del Movimiento PlanoDokumen19 halaman3M Cinematica Del Movimiento PlanoRoger ChungBelum ada peringkat
- Reporte OptimizacionDokumen14 halamanReporte OptimizacionFG GamaBelum ada peringkat
- Fase3 Grupo19 VivianaEugeniaUribeChamorroDokumen21 halamanFase3 Grupo19 VivianaEugeniaUribeChamorroJenifer OrtegaBelum ada peringkat
- Robot DeltaDokumen5 halamanRobot Deltademonaz099Belum ada peringkat
- Cinemática Inversa (Definición, Ejemplo y Conclusiones)Dokumen5 halamanCinemática Inversa (Definición, Ejemplo y Conclusiones)Ninfa PérezBelum ada peringkat
- Fase 3 - Lluvia de Ideas GrupoDokumen13 halamanFase 3 - Lluvia de Ideas Grupodiego ferBelum ada peringkat
- Robótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsDari EverandRobótica: enfoque computacional: Transformaciones espaciales, planificación de trayectorias, cinemática, dinámica y control de robotsBelum ada peringkat
- UF1253 - Diagnóstico de deformaciones estructuralesDari EverandUF1253 - Diagnóstico de deformaciones estructuralesBelum ada peringkat
- Ejercicios de Integrales de Línea, Superficie y VolumenDari EverandEjercicios de Integrales de Línea, Superficie y VolumenPenilaian: 4 dari 5 bintang4/5 (2)
- BinderDokumen162 halamanBinderAcus Xelor Imperium TemporeBelum ada peringkat
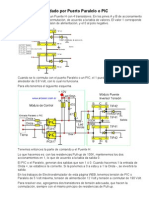
- Puente H Comandado Por Puerto Paralelo o PICDokumen3 halamanPuente H Comandado Por Puerto Paralelo o PICGabriela Perales OréBelum ada peringkat
- TSX17 User ManualDokumen62 halamanTSX17 User ManualLuis Eloy Mamani SanchoBelum ada peringkat
- CinematicadelaparticulaDokumen38 halamanCinematicadelaparticulaEliana Sanchez67% (3)
- Instructivo para El Uso y El Cuidado de La MáquinaDokumen1 halamanInstructivo para El Uso y El Cuidado de La MáquinaSacul Uyo50% (6)
- Procesamiento Digital de Imágenes Con MatlabDokumen61 halamanProcesamiento Digital de Imágenes Con MatlabPercy Julio Chambi Pacco100% (7)
- Cinemática inversa de robots industrialesDokumen5 halamanCinemática inversa de robots industrialesAcus Xelor Imperium TemporeBelum ada peringkat
- Como Programar Un PIC Con MPLABDokumen20 halamanComo Programar Un PIC Con MPLABPaola VelazcoBelum ada peringkat
- UPNDokumen39 halamanUPNEsteban LazaroBelum ada peringkat
- Historia Del Computador Generada Por Tiki-TokiDokumen6 halamanHistoria Del Computador Generada Por Tiki-TokiMilton DiazBelum ada peringkat
- Simbologias de GasDokumen11 halamanSimbologias de GasKarina MatamalaBelum ada peringkat
- Evaluacion Formativa, Sem 1Dokumen7 halamanEvaluacion Formativa, Sem 1Edinson Alexi Crisosto100% (1)
- ALGEBRADokumen12 halamanALGEBRAKamyBelum ada peringkat
- 444 - Tarea1 - Claudia Patricia QuinteroDokumen15 halaman444 - Tarea1 - Claudia Patricia Quinteroclaudia patricia quinteroBelum ada peringkat
- Actividad 5 - Programación EstructuradaDokumen7 halamanActividad 5 - Programación EstructuradaJc Ca100% (4)
- Ejercicios Resultos Base de Datos Relacional Introduccion A SQLDokumen59 halamanEjercicios Resultos Base de Datos Relacional Introduccion A SQLpeperinoBelum ada peringkat
- 2 Diseño de Circuito AutomatizadoDokumen29 halaman2 Diseño de Circuito AutomatizadoArnaldo González Cantillo100% (1)
- BB 2012 Manual EsDokumen573 halamanBB 2012 Manual EsjjhonkcarBelum ada peringkat
- Formatos de Texto y Captura de PantallaDokumen7 halamanFormatos de Texto y Captura de PantallaJorge Alejandro Léon SanchezBelum ada peringkat
- Estimación de proyectos de software con PROBEDokumen5 halamanEstimación de proyectos de software con PROBELuis Enrique ArgüellesBelum ada peringkat
- Itriplee Formato Informes PDFDokumen7 halamanItriplee Formato Informes PDFRicardo Rodriguez VargasBelum ada peringkat
- Amigos Reales o Virtuales PDFDokumen21 halamanAmigos Reales o Virtuales PDFJorge Bernardo OchoaBelum ada peringkat
- Poster Modelo de Sincronizacion Enesi Evento Valledupar ActualizadoDokumen1 halamanPoster Modelo de Sincronizacion Enesi Evento Valledupar ActualizadoJavier SolanoBelum ada peringkat
- Configuración de TP-Link Modem Router TD-8816 para CANTVDokumen17 halamanConfiguración de TP-Link Modem Router TD-8816 para CANTVCristian UribeBelum ada peringkat
- Software Computacional y Su ClasificaciónDokumen8 halamanSoftware Computacional y Su ClasificaciónYansy GonzalezBelum ada peringkat
- Fases e Informe AuditoriaDokumen6 halamanFases e Informe Auditoriadarkness5125100% (6)
- Grafos PlanosDokumen5 halamanGrafos PlanosJuanBelum ada peringkat
- Test Memoria AsociativaDokumen22 halamanTest Memoria AsociativaDinko Supertramp100% (1)
- Resumen NIA 700Dokumen2 halamanResumen NIA 700Sandra García80% (5)
- Manual de Catia v5Dokumen314 halamanManual de Catia v5myr30Belum ada peringkat
- Sesion de Expresiones AlgebraicasDokumen3 halamanSesion de Expresiones AlgebraicasNancy Rocio Vasquez VillegasBelum ada peringkat
- AIO's Technician GUIDokumen10 halamanAIO's Technician GUIRonald Huacasi CcopaBelum ada peringkat
- Ejercicio 5 y 1 Solución de La Primera EvaluaciónDokumen9 halamanEjercicio 5 y 1 Solución de La Primera Evaluaciónalvaro machacaBelum ada peringkat
- TDR Zeiss Opmi Lumera PREVENTIVODokumen3 halamanTDR Zeiss Opmi Lumera PREVENTIVOMarco Vargas PelaezBelum ada peringkat
- Temario Mtro. Ricardo Adán Madrid TrejoDokumen4 halamanTemario Mtro. Ricardo Adán Madrid TrejoEg AbaBelum ada peringkat
- Procedimiento de Mantenimiento de Equipos, Instalaciones y ServiciosDokumen17 halamanProcedimiento de Mantenimiento de Equipos, Instalaciones y ServiciosLuis Eduardo EstradaBelum ada peringkat
- Temática Tablas de Retención DocumentalDokumen3 halamanTemática Tablas de Retención DocumentalJuan giraldoBelum ada peringkat
- Herramientas de pruebas de rendimiento: Jmeter, LoadNinja, WebLoad y másDokumen4 halamanHerramientas de pruebas de rendimiento: Jmeter, LoadNinja, WebLoad y másMaria Paula Franco GuzmanBelum ada peringkat