Anda mungkin juga menyukai
- Ant Colony System With Communication StrategiesDokumen14 halamanAnt Colony System With Communication Strategiesnathan603Belum ada peringkat
- Review of Ant Colony Optimization Algorithms Onvehicle Routing Problems and Introduction Toestimation-Based AcoDokumen6 halamanReview of Ant Colony Optimization Algorithms Onvehicle Routing Problems and Introduction Toestimation-Based Acoadarsh_arya_1Belum ada peringkat
- Ant Colony Optimization PDFDokumen7 halamanAnt Colony Optimization PDFMati dell'ErbaBelum ada peringkat
- Evaluación de La Estabilidad de Taludes Mediante Algoritmos de Agrupación de Hormigas AleatoriasDokumen7 halamanEvaluación de La Estabilidad de Taludes Mediante Algoritmos de Agrupación de Hormigas AleatoriasJames KenobiBelum ada peringkat
- Tuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessDokumen4 halamanTuning of Type-1 Servo System Using Swarm Intelligence For SIMO ProcessAnonymous WkbmWCa8MBelum ada peringkat
- Research On Flux Observer Based On Wavelet Neural Network Adjusted by Antcolony OptimizationDokumen5 halamanResearch On Flux Observer Based On Wavelet Neural Network Adjusted by Antcolony OptimizationKameleon TaliBelum ada peringkat
- JCST Paper PDFDokumen17 halamanJCST Paper PDFRobin CookBelum ada peringkat
- Ant Colony Optimization: A New Meta-HeuristicDokumen8 halamanAnt Colony Optimization: A New Meta-Heuristicanil_invisibleBelum ada peringkat
- Swarm Intelligence-Based Technique To Enhance Performance of Ann in Structural Damage Detection PDFDokumen15 halamanSwarm Intelligence-Based Technique To Enhance Performance of Ann in Structural Damage Detection PDFtungch46Belum ada peringkat
- Bee ColonyDokumen7 halamanBee ColonyLupu CiprianBelum ada peringkat
- Chaotic Bee Swarm Optimization Algorithm For Path Planning of Mobile RobotsDokumen6 halamanChaotic Bee Swarm Optimization Algorithm For Path Planning of Mobile RobotsGeorgehanyBelum ada peringkat
- Ciencia UANL 18,71Dokumen7 halamanCiencia UANL 18,71Marco RamirezBelum ada peringkat
- A New Approach For Dynamic Fuzzy Logic Parameter Tuning in Ant Colony Optimization and Its Application in Fuzzy Control of A Mobile RobotDokumen28 halamanA New Approach For Dynamic Fuzzy Logic Parameter Tuning in Ant Colony Optimization and Its Application in Fuzzy Control of A Mobile RobotAraceli CastruitaBelum ada peringkat
- Immune Optimization of Path Planning For Coal Mine Rescue RobotDokumen8 halamanImmune Optimization of Path Planning For Coal Mine Rescue RobotIOSRjournalBelum ada peringkat
- Sensor Deployment Using Particle Swarm Optimization: Nikitha KukunuruDokumen7 halamanSensor Deployment Using Particle Swarm Optimization: Nikitha KukunuruArindam PalBelum ada peringkat
- Hardware Implementations of Swarming Intelligence - A SurveyDokumen9 halamanHardware Implementations of Swarming Intelligence - A SurveySreelaxmy V RajendranBelum ada peringkat
- Hitung Antco Aco-Tutorial-English2Dokumen12 halamanHitung Antco Aco-Tutorial-English2aeterna putriBelum ada peringkat
- Ant Colony OptimizationDokumen6 halamanAnt Colony OptimizationBizon CristiBelum ada peringkat
- TSP Indin08Dokumen7 halamanTSP Indin08GeorgehanyBelum ada peringkat
- Swarm Intelligence 3.1. Swarm IntelligenceDokumen6 halamanSwarm Intelligence 3.1. Swarm IntelligencePravat SatpathyBelum ada peringkat
- Design of Linear and Circular Antenna Arrays Using Cuckoo Optimization AlgorithmDokumen11 halamanDesign of Linear and Circular Antenna Arrays Using Cuckoo Optimization AlgorithmMatthew AlexanderBelum ada peringkat
- Nano Sci Tech 20081Dokumen5 halamanNano Sci Tech 20081mbjasserBelum ada peringkat
- Application of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysisDokumen4 halamanApplication of PSO, Artificial Bee Colony and Bacterial Foraging Optimization Algorithms To Economic Load Dispatch: An AnalysispragatinareshBelum ada peringkat
- A Hybrid GA-PSO Algorithm To Solve Traveling Salesman ProblemDokumen10 halamanA Hybrid GA-PSO Algorithm To Solve Traveling Salesman ProblemKarim EL BouyahyiouyBelum ada peringkat
- Backtracking Ant System For The Traveling Salesman ProblemDokumen2 halamanBacktracking Ant System For The Traveling Salesman ProblemVũ HằngBelum ada peringkat
- Ant Colony Optimization For Water ResourcesDokumen13 halamanAnt Colony Optimization For Water Resources7Sapte7Belum ada peringkat
- Research Paper FRDokumen5 halamanResearch Paper FRmdkamrul.hasanBelum ada peringkat
- Spiral Array Design With Particle Swarm Optimization: Rilin Chen, Pengxiao Teng, Yichun YangDokumen4 halamanSpiral Array Design With Particle Swarm Optimization: Rilin Chen, Pengxiao Teng, Yichun YangVinay KothapallyBelum ada peringkat
- Swarm Intelligence: From Natural To Artificial SystemsDokumen42 halamanSwarm Intelligence: From Natural To Artificial SystemsJoganna JesvanBelum ada peringkat
- A Metaheuristic Bat-Inspired Algorithm For Full Body Human Pose EstimationDokumen7 halamanA Metaheuristic Bat-Inspired Algorithm For Full Body Human Pose EstimationCinnamon CloverBelum ada peringkat
- Particle Swarm Optimization Algorithm-An OverviewDokumen22 halamanParticle Swarm Optimization Algorithm-An Overviewamreen786Belum ada peringkat
- Swarm Intelligence: From Natural To Artificial SystemsDokumen42 halamanSwarm Intelligence: From Natural To Artificial SystemsneuralterapianetBelum ada peringkat
- Hybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationDokumen10 halamanHybrid Training of Feed-Forward Neural Networks With Particle Swarm OptimizationAbolfazl AbbasiyanBelum ada peringkat
- Optimized Detection in Multi Antenna System Using Particle Swarm AlgorithmDokumen5 halamanOptimized Detection in Multi Antenna System Using Particle Swarm AlgorithmvbjjBelum ada peringkat
- Particle Swarm OptimizationDokumen22 halamanParticle Swarm OptimizationOmar MontufarBelum ada peringkat
- Solving The Traveling Salesman Problem With Ant Colony Optimization: A Revisit and New Efficient AlgorithmsDokumen9 halamanSolving The Traveling Salesman Problem With Ant Colony Optimization: A Revisit and New Efficient AlgorithmsViet DinhvanBelum ada peringkat
- Genetic Optimization Techniques for Sizing and Management of Modern Power SystemsDari EverandGenetic Optimization Techniques for Sizing and Management of Modern Power SystemsBelum ada peringkat
- DocHighly Optimized Energy Saving Protocol For Flying Ad-Hoc NetworkDokumen15 halamanDocHighly Optimized Energy Saving Protocol For Flying Ad-Hoc NetworkIJRASETPublicationsBelum ada peringkat
- Paper 2Dokumen5 halamanPaper 2RakeshconclaveBelum ada peringkat
- Searching Objects Efficiently in A Distributed System Using Stochastic Diffusion OptimizationDokumen9 halamanSearching Objects Efficiently in A Distributed System Using Stochastic Diffusion OptimizationRakeshconclaveBelum ada peringkat
- ACO Algorithms For The Traveling Salesman Problem: IRIDIA, Universit e Libre de Bruxelles, BelgiumDokumen23 halamanACO Algorithms For The Traveling Salesman Problem: IRIDIA, Universit e Libre de Bruxelles, BelgiumSait DemirBelum ada peringkat
- ELK 1206 108 Manuscript 2Dokumen18 halamanELK 1206 108 Manuscript 2Moazh TawabBelum ada peringkat
- Tracking Changing Extrema With Adaptive Particle Swarm OptimizerDokumen5 halamanTracking Changing Extrema With Adaptive Particle Swarm OptimizerNaren PathakBelum ada peringkat
- Comparison of Genetic Algorithm and Particle Swarm OptimizationDokumen6 halamanComparison of Genetic Algorithm and Particle Swarm OptimizationMikemekanicsBelum ada peringkat
- Optimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyDokumen6 halamanOptimizing The Sensor Deployment Strategy For Large-Scale Internet of Things (IoT) Using Artificial Bee ColonyHemanth S.NBelum ada peringkat
- The No Free Lunch Theorem Does Not Apply To Continuous OptimizationDokumen12 halamanThe No Free Lunch Theorem Does Not Apply To Continuous Optimizationabhisek.koolBelum ada peringkat
- Train Scheduling Using Ant Colony Optimization Technique: K.Sankar Lecturer / M.E., (P.HD) .Dokumen4 halamanTrain Scheduling Using Ant Colony Optimization Technique: K.Sankar Lecturer / M.E., (P.HD) .Journal of Computer ApplicationsBelum ada peringkat
- Ant Colony Optimization: A Technique Used For Image ProcessingDokumen3 halamanAnt Colony Optimization: A Technique Used For Image ProcessingRobert RobinsonBelum ada peringkat
- Vmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationDokumen5 halamanVmax.: Soft Adaptive Particle Swarm Algorithm For Large Scale OptimizationIndira SivakumarBelum ada peringkat
- GP - Ant Colony OptimizationDokumen41 halamanGP - Ant Colony OptimizationPratap BarreBelum ada peringkat
- 303 NaveenDokumen4 halaman303 NaveenRashmi GuptaBelum ada peringkat
- Application of ACODokumen7 halamanApplication of ACOfunky_zorroBelum ada peringkat
- Ants 2002Dokumen12 halamanAnts 2002api-3831656Belum ada peringkat
- Applying The Ant System To The Vehicle Routing ProblemDokumen12 halamanApplying The Ant System To The Vehicle Routing ProblemMuhammad AriefBelum ada peringkat
- ReportDokumen2 halamanReportRahul NKBelum ada peringkat
- Modelling Prey Predator Dynamics Via Particle Swarm Optimization and Cellular AutomataDokumen12 halamanModelling Prey Predator Dynamics Via Particle Swarm Optimization and Cellular AutomatakingarpharazonBelum ada peringkat
- Ant Colony Optimization BDokumen8 halamanAnt Colony Optimization Bapi-3773589Belum ada peringkat
- PSO Algorithm With Self Tuned Parameter For Efficient Routing in VLSI DesignDokumen4 halamanPSO Algorithm With Self Tuned Parameter For Efficient Routing in VLSI Designsudipta2580Belum ada peringkat
- A Novel Binary Ant Colony Optimization: Application To The Unit Commitment Problem of Power SystemsDokumen8 halamanA Novel Binary Ant Colony Optimization: Application To The Unit Commitment Problem of Power SystemsfddddddBelum ada peringkat
- Ant Colony Optimization For Routing and Load-Balancing: Survey and New DirectionsDokumen13 halamanAnt Colony Optimization For Routing and Load-Balancing: Survey and New Directionsramanji2009Belum ada peringkat
- Soliton Interaction PDFDokumen6 halamanSoliton Interaction PDFmenguemengueBelum ada peringkat
- Rossby WavesDokumen8 halamanRossby WavesmenguemengueBelum ada peringkat
- Multilayered Metamaterials PDFDokumen8 halamanMultilayered Metamaterials PDFmenguemengueBelum ada peringkat
- Light Nanoantennas PDFDokumen11 halamanLight Nanoantennas PDFmenguemengueBelum ada peringkat
- Nanoradar Based On Nonlinear Dimer NanoantennaDokumen3 halamanNanoradar Based On Nonlinear Dimer NanoantennamenguemengueBelum ada peringkat
- Optical Nanoantennas PDFDokumen6 halamanOptical Nanoantennas PDFmenguemengueBelum ada peringkat
- Yu. S. Kivshar - Bright and Dark Spatial Solitons in Non-Kerr MediaDokumen44 halamanYu. S. Kivshar - Bright and Dark Spatial Solitons in Non-Kerr Media23213mBelum ada peringkat
- FDTD Numerics PDFDokumen4 halamanFDTD Numerics PDFmenguemengueBelum ada peringkat
- Bifurc Coupled Osc PDFDokumen9 halamanBifurc Coupled Osc PDFmenguemengueBelum ada peringkat
- Bose Einstein PDFDokumen4 halamanBose Einstein PDFmenguemengueBelum ada peringkat
- Photonic Crystals PDFDokumen3 halamanPhotonic Crystals PDFmenguemengueBelum ada peringkat
- Torsional Meta PDFDokumen16 halamanTorsional Meta PDFmenguemengueBelum ada peringkat
- Multimode Waveguides PDFDokumen3 halamanMultimode Waveguides PDFmenguemengueBelum ada peringkat
- Intrinsic Modes PDFDokumen6 halamanIntrinsic Modes PDFmenguemengueBelum ada peringkat
- Soliton Perturbations PDFDokumen4 halamanSoliton Perturbations PDFmenguemengueBelum ada peringkat
- A: Multistable Nonlinear Surface ModesDokumen9 halamanA: Multistable Nonlinear Surface ModesmenguemengueBelum ada peringkat
- Solitons Waveguides PDFDokumen3 halamanSolitons Waveguides PDFmenguemengueBelum ada peringkat
- Modes Frenkel PDFDokumen15 halamanModes Frenkel PDFmenguemengueBelum ada peringkat
- Bright Kerr PDFDokumen3 halamanBright Kerr PDFmenguemengueBelum ada peringkat
- Vortex Optics PDFDokumen9 halamanVortex Optics PDFmenguemengueBelum ada peringkat
- Sine-Gordon Soliton PDFDokumen3 halamanSine-Gordon Soliton PDFmenguemengueBelum ada peringkat
- Competing Nonlinearities With MetamaterialsDokumen4 halamanCompeting Nonlinearities With MetamaterialsmenguemengueBelum ada peringkat
- Plasmons Waveguides PDFDokumen5 halamanPlasmons Waveguides PDFmenguemengueBelum ada peringkat
- Ferromagnets PDFDokumen5 halamanFerromagnets PDFmenguemengueBelum ada peringkat
- Volume 111A, Number 8,9 Physics Letters 7 October 1985Dokumen3 halamanVolume 111A, Number 8,9 Physics Letters 7 October 1985menguemengueBelum ada peringkat
- Chiral MetamaterialsDokumen6 halamanChiral Metamaterialspobio-1Belum ada peringkat
- Four Wave Mixing Meta PDFDokumen6 halamanFour Wave Mixing Meta PDFmenguemengueBelum ada peringkat
- Convert Phase Noise To JitterDokumen10 halamanConvert Phase Noise To JitterBo LuBelum ada peringkat
- Magnetoelastic Metamaterials PDFDokumen5 halamanMagnetoelastic Metamaterials PDFmenguemengueBelum ada peringkat
- Piezoelectric EffectDokumen3 halamanPiezoelectric Effecteswar6280100% (1)
- Levels of CommunicationDokumen3 halamanLevels of CommunicationAiyaz ShaikhBelum ada peringkat
- SievesDokumen3 halamanSievesVann AnthonyBelum ada peringkat
- Course Outline ENTR401 - Second Sem 2022 - 2023Dokumen6 halamanCourse Outline ENTR401 - Second Sem 2022 - 2023mahdi khunaiziBelum ada peringkat
- CPD - SampleDokumen3 halamanCPD - SampleLe Anh DungBelum ada peringkat
- Job Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeDokumen16 halamanJob Satisfaction of Library Professionals in Maharashtra State, India Vs ASHA Job Satisfaction Scale: An Evaluative Study Dr. Suresh JangeNaveen KumarBelum ada peringkat
- Agma MachineDokumen6 halamanAgma Machinemurali036Belum ada peringkat
- TTDM - JithinDokumen24 halamanTTDM - JithinAditya jainBelum ada peringkat
- Eccentric FootingDokumen3 halamanEccentric FootingVarunn VelBelum ada peringkat
- Bring Your Gear 2010: Safely, Easily and in StyleDokumen76 halamanBring Your Gear 2010: Safely, Easily and in StyleAkoumpakoula TampaoulatoumpaBelum ada peringkat
- A202 KBK3043 - Assignment Individual (20%) Review LiteratureDokumen5 halamanA202 KBK3043 - Assignment Individual (20%) Review LiteratureAlfie AliBelum ada peringkat
- Misc 8DNL 8MPL 8MPN B PDFDokumen41 halamanMisc 8DNL 8MPL 8MPN B PDFVesica PiscesBelum ada peringkat
- PTW Site Instruction NewDokumen17 halamanPTW Site Instruction NewAnonymous JtYvKt5XEBelum ada peringkat
- Etag 002 PT 2 PDFDokumen13 halamanEtag 002 PT 2 PDFRui RibeiroBelum ada peringkat
- Source:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Dokumen2 halamanSource:: APJMR-Socio-Economic-Impact-of-Business-Establishments - PDF (Lpubatangas - Edu.ph)Ian EncarnacionBelum ada peringkat
- CE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Dokumen6 halamanCE EVALUATION EXAM No. 4 - MGT, Fluid Properties, Hydrostatic Force (Answer Key)Angelice Alliah De la CruzBelum ada peringkat
- solidworks ขั้นพื้นฐานDokumen74 halamansolidworks ขั้นพื้นฐานChonTicha'Belum ada peringkat
- English Test For Grade 7 (Term 2)Dokumen6 halamanEnglish Test For Grade 7 (Term 2)UyenPhuonggBelum ada peringkat
- Thesis TipsDokumen57 halamanThesis TipsJohn Roldan BuhayBelum ada peringkat
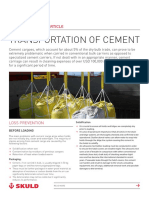
- Transportation of CementDokumen13 halamanTransportation of CementKaustubh Joshi100% (1)
- BSS Troubleshooting Manual PDFDokumen220 halamanBSS Troubleshooting Manual PDFleonardomarinBelum ada peringkat
- Manhole Head LossesDokumen11 halamanManhole Head Lossesjoseph_mscBelum ada peringkat
- Darkle Slideshow by SlidesgoDokumen53 halamanDarkle Slideshow by SlidesgoADITI GUPTABelum ada peringkat
- IPA Smith Osborne21632Dokumen28 halamanIPA Smith Osborne21632johnrobertbilo.bertilloBelum ada peringkat
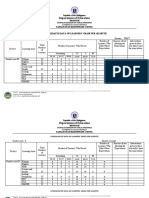
- Department of Education: Consolidated Data On Learners' Grade Per QuarterDokumen4 halamanDepartment of Education: Consolidated Data On Learners' Grade Per QuarterUsagi HamadaBelum ada peringkat
- Atmel 46003 SE M90E32AS DatasheetDokumen84 halamanAtmel 46003 SE M90E32AS DatasheetNagarajBelum ada peringkat
- Amity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorDokumen23 halamanAmity School of Business:, Semester IV Research Methodology and Report Preparation Dr. Deepa KapoorMayank TayalBelum ada peringkat
- Polysep... Sized For Every Application: Psg-7 Psg-15 Psg-30 Psg-60 Psg-90Dokumen1 halamanPolysep... Sized For Every Application: Psg-7 Psg-15 Psg-30 Psg-60 Psg-90Carlos JiménezBelum ada peringkat
- MATH CIDAM - PRECALCULUS (Midterm)Dokumen4 halamanMATH CIDAM - PRECALCULUS (Midterm)Amy MendiolaBelum ada peringkat
- Marking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Dokumen7 halamanMarking Scheme For Term 2 Trial Exam, STPM 2019 (Gbs Melaka) Section A (45 Marks)Michelles JimBelum ada peringkat
- Gas Compressor SizingDokumen1 halamanGas Compressor SizingNohemigdeliaLucenaBelum ada peringkat