Fundamentos de Robotica
Diunggah oleh
vipllengerJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Fundamentos de Robotica
Diunggah oleh
vipllengerHak Cipta:
Format Tersedia
SEP SNEST DGEST
INSTITUTO TECNOLGICO DE TOLUCA
ESPECIALIDAD: MECATRNICA
ASIGNATURA: FUNDAENTOS DE ROBOTICA
TEMA: MODELO DINAMICO APLICANDO
METODO DE LAGRANGE Y METODO DE NEWTON-EULER
ALUMNO:
HERNANDEZ CEDILLO RICARDO
CALIFICACIN: ___________________
INTRODUCCIN
Un robot es un manipulador flexible, reprogramable y multifuncional, en
contraposicin a las mquinas automticas, las que estn diseadas para realizar,
nicamente una tarea especfica. En los robots al igual que sucede con los seres
humanos, para ejecutar cualquier tarea se debe analizar cules sern los
movimientos necesarios y cul ser la fuerza que se le aplicar.
El modelo dinmico precisamente analiza esta situacin y expresa las fuerzas o
pares requeridos por los actuadores, para lograr el movimiento deseado, en
trminos de posiciones, velocidades y aceleraciones a lo largo de la trayectoria y
los parmetros del manipulador. Esto permitir evaluar vibraciones, sobrepesos y
sobre voltajes, que llevaran a movimientos errticos o descoordinados.
Los pares de torsin que se requieren para impulsar el brazo del robot no pueden
determinarse solo considerando las fuerzas estticas y dinmicas, sino que
tambin deber tenerse en cuenta que cada articulacin reacciona a los pares de
torsin de las otras articulaciones en el manipulador y los efectos de estas
reacciones debern incluirse en el anlisis.
Resulta difcil proporcionar una solucin adecuada para las aceleraciones de los
enlaces puesto que las mismas dependen de la inercia y esta a su vez de la
configuracin del brazo, la que est sujeta a cambios debido al movimiento de las
articulaciones.
Otro factor adicional que influye en relacin con la inercia, es la masa de la carga
til y su posicin con respecto a las articulaciones la que tambin se modifica con
el movimiento de estas.
Otro punto a tener en cuenta es la velocidad de movimiento del brazo, si esta es
relativamente elevada, los efectos centrfugos que se generen ser significativos.
El modelo plantea una serie de ecuaciones, cuya resolucin nos permite obtener
la informacin necesaria, la que ser enviada hasta el robot mediante tarjetas
electrnicas insertadas en l. Estos circuitos envan la seal de voltaje a la fuente
de potencia del robot, encargada de convertirla en la potencia adecuada que
necesita cada motor para realizar la funcin asignada.
Conocer esta informacin antes de ensamblar el robot permite que las tarjetas,
motores y fuentes de potencia tengan un mejor funcionamiento y se desgasten
menos.
Muchas veces se cae en el error de disear la parte mecnica y pasar por alto la
obtencin del modelo dinmico; cuando esto ocurre el robot puede recibir valores
inadecuados de fuerza para mover sus articulaciones, lo que disminuye el
desempeo del movimiento y se presentan comportamientos indeseados.
Los robots paralelos se han convertido en una alternativa interesante a los
tradicionales robots serie. ste tipo de mecanismos est generalmente compuesto
por dos o ms cadenas cinemticas que unen una plataforma mvil donde se
coloca el elemento terminal a la base fija. Esta disposicin mecnica permite una
mayor rigidez estructural, adems de la posibilidad de operar a muy altas
velocidades con alta precisin.
Como contrapartida, la complejidad estructural de los mecanismos deriva en una
cinemtica y dinmica altamente no lineal y acoplada, un espacio de trabajo
reducido, singularidades internas y la aparicin de articulaciones no actuadas,
entre otros problemas.
Con el objetivo de compensar estas desventajas, en los ltimos 2 dcadas se ha
realizado un gran esfuerzo investigador. La mayor parte de los trabajos en este
campo se centran en la resolucin de la cinemtica de estos mecanismos, su
anlisis de singularidades y su sntesis. Sin embargo, el modelado dinmico,
necesario para estrategias de control basadas en modelo, ha sido objeto de
estudio de pocos autores, debido, principalmente, a la complejidad de la
formulacin. En este artculo, se aborda la problemtica relacionada con la
obtencin del modelo dinmico de estos robots.
En robtica serie, la formulacin Lagrangiana y la de Newton-Euler (N-E) han sido
extensamente utilizadas para calcular el modelo dinmico, cuya forma se presenta
en la ecuacin (1).
Donde _ representa el vector de las fuerzas/pares de los actuadores, q presenta el
vector de las n coordenadas articulares actuadas, D es la matriz simtrica, definida
positiva de inercia, C es la matriz de coriolis, donde (D 2C) es antisimtrica y G
es el vector de gravedad.
Sin embargo, la obtencin de un modelo con caractersticas similares en robtica
paralela no es una tarea fcil, debido a las articulaciones pasivas o no actuadas.
La aparicin de stas en la estructura incrementa la complejidad de los problemas
cinemtico y dinmico. Para evitar estos inconvenientes, algunos autores han
propuesto la utilizacin de sensores en algunas articulaciones pasivas para
simplificar el problema cinemtico e incrementar el rendimiento del control.
Realizando un anlisis de los antecedentes bibliogrficos, los autores han
propuesto tres mtodos principales para la obtencin del modelo dinmico: la
formulacin Lagrangiana, el uso de la leyes de
N-E, y el Principio de los Trabajos Virtuales.
Formulacin de Newton-Euler
La formulacin de N-E requiere la definicin de las ecuaciones de N-E para cada
cuerpo que compone el mecanismo. De este modo, todas las fuerzas internas y
externas actuando sobre el mecanismo son calculadas, generando un sistema de
ecuaciones de gran dimensin. La mayora de los autores han aplicado
directamente este mtodo a plataformas paralelas especficas, especialmente el
Hexpodo o la plataforma Gough.
Dado que la mayora de los mecanismos paralelos est compuesto por una
plataforma mvil y un grupo de cadenas serie uniendo sta a la base, una
estrategia adoptada por numerosos autores ha sido la de dividir el mecanismo en
estos dos subsistemas.
De este modo, la mayora de los mtodos calculan el modelo dinmico de cada
uno de los subsistemas, considerando las fuerzas de reaccin entre ambos, y en
un paso posterior, unen ambos utilizando diversas tcnicas. Una contribucin
destacada es donde Angeles propone el uso del Complemento Ortonormal Natural
(NOC) para proyectar el torsor cinemtico del sistema en el espacio articular
actuado.
Realiza iteraciones sobre los links en dos sentidos:
Clculos hacia delante:
Primero, calcular la velocidad y aceleracin angular y la velocidad y
aceleracin lineal, de cada link (i) en funcin del link anterior (i-1).
Estos valores pueden calcularse recursivamente, comenzando desde la
base (v, a = 0) y terminando por el link o efector final.
Clculos hacia atrs:
Medir, calcular o definir las fuerzas/torques actuantes sobre el efector final.
Con las velocidades y aceleraciones previamente encontradas, calcular las
fuerzas/torques en las juntas de cada link partiendo desde el efector final y
terminando en la base.
Aceleracin lineal y angular:
Aceleracin lineal:
: Orgenes coincidentes.
: Reescribiendo.
:Y
derivando.
Cuando los orgenes no coinciden:
Aceleracin angular:
B est rotando respecto de A, y C esta rotando respecto de B:
: Aceleracin angular de los links de un manipulador
Distribucin de masas:
Tensor de inercia:
Generalizacin del momento de inercia escalar de un objeto.
Momento de inercia:
El momento de inercia de un cuerpo slido con densidad (r), con respecto a un
dado eje se define:
donde r es la distancia perpendicular a dicho eje de rotacin.
para distribucin discreta de masas.
para distribucin continua de masas
Tensor de inercia relativo al frame {A}:
Momento de masa de inercia.
Producto de masa de inercia.
Si podemos elegir la orientacin del frame de referencia, es posible hacer cero los
productos de inercia.
Ejes principales.
Momentos principales de inercia.
Ejemplo:
Teorema de los ejes paralelos:
Relaciona el tensor de inercia en un frame con origen en el centro de masas ( CI),
al tensor de inercia respecto de otro frame ( AI) :
Ecuacin de Newton:
Fuerzas causantes de traslacin
Ecuacin de Euler:
Momentos causantes de rotacin
Balance de fuerzas en un link:
Balance de torques en un link:
Balance de Fuerzas:
Usando el resultado de balance de fuerza y torque:
En su forma iterativa:
MTODO NEWTON-EULER:
Iteraciones hacia delante (juntas rotacionales):
MTODO NEWTON-EULER:
Iteraciones hacia atrs (juntas rotacionales):
Teorema de los ejes paralelos:
Relaciona el tensor de inercia en un frame con origen en el centro de masas ( CI),
al tensor de inercia respecto de otro frame ( AI) :
Inclusin de la fuerza de gravedad:
El efecto de las cargas por gravedad sobre los links, puede agregarse haciendo,
donde G es el vector gravedad.
Estructura de las ecuaciones dinmicas:
<- Ecuacin, espacio de estados
<- Trminos Centrfugos y Coriolis.
<- Matriz de masas.
<- Trminos de Gravedad.
<- Coeficientes de Coriolis.
<- Coeficientes Centrfugos
Fuerza de Coriolis:
Una fuerza ficticia ejercida sobre un cuerpo, cuando este se mueve en un frame
de referencia en rotacin.
Ejemplo: Manipulador -r
En la junta 1 hay torque:
= m1 r1 2 + m2 r2 2 + 2 m2 r2 r2 + g cos (m1 r1 + m2 r2 )
En la junta 2 hay esfuerzo:
Fr2= m2 r2 - m2 r2 2 + m2 q sen
Manipulador -r
1 inercia. 2 coriolis. 3 centrfuga. 4 gravitatoria.
1 = m1 r1 2 + m2 r2 2 + 2 m2 r2 r2 + g cos (m1 r1 + m2 r2 )
1 2 4
F2 = m2 r2 - m2 r2 2 + m2 g sen
1 3 4
Formulacin Lagrangeana del modelo dinmico:
Mtodo basado en un balance de energas.
N-E y la formulacin Lagrangeana producirn las mismas ecuaciones de
para el mismo manipulador.
Energa cintica y potencial del manipulador:
Energa cintica total del manipulador=
Energa potencial total del manipulador=
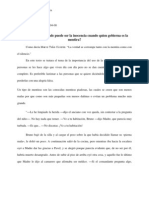
MODELO CINEMTICO (EJEMPLO)
Modelado Cinemtico Directo
Para desarrollar el modelo cinemtico directo, se sigue el algoritmo de Denavit-
Hartenberg (DH). Como se observa en [3]. La figura 1-B muestra el diagrama de
bloques cinemticos.
De la figura 1-B y el algoritmo de DH se obtiene la tabla 1 que muestra los
parmetros DH del robot.
a) Robot SCORBOT
ER-V+
b) Diagrama de bloques
cinemticos
Figura 1. Robot SCORBOT ER-V+
Tabla 1. Parmetros DH del robot SCORBOT ER-V +
Eslabn i
u
i
d
i
a
i
o
1 1
u
1
l (0.364
m)
0 90
2 2
u
0
2
l (0.22 m) 0
3 3
u
0
3
l (0.22 m) 0
Con los parmetros de la tabla anterior se obtiene la matriz de transformacin
de cada uno de los elementos de la cadena cinemtica. Por simplicidad
i i
C Cosu =
y
i i
S Senu = .
1 1
1 1 0
1
1
0 0
0 0
0 1 0
0 0 0 1
C S
S C
A
l
(
(
(
=
(
(
(1)
2 2 2 2
2 2 2 2 1
2
0
0
0 0 1 0
0 0 0 1
C S l C
S C l S
A
(
(
(
=
(
(
(2)
3 3 3 3
3 3 3 3 2
3
0
0
0 0 1 0
0 0 0 1
C S l C
S C l S
A
(
(
(
=
(
(
(3)
Con las matrices anteriores, se puede obtener la matriz de transformacin
homognea de la cadena cinemtica completa.
1 2 3 1 2 3 1 3 1 2 3 2 1 2
1 2 3 1 2 3 1 3 1 2 3 2 1 2
2 3 2 3 3 2 3 2 2 1
0
0 0 0 1
C C C S S l C C l C C
S C S S C l S C l S C
T
S C l S l S l
+ + +
+ + +
+ + +
+ (
(
+
(
=
( + +
(
(4)
La ltima columna de la matriz T de la Ec. (4), corresponde a las ecuaciones de
la posicin del efector final.
3 1 2 3 3 1 2 3 2 1 2 x
p l CC C l C S S l CC = + (5)
3 1 2 3 3 1 2 3 2 1 2 y
p l S C C l S S S l S C = + (6)
3 2 3 3 2 3 2 2 1 z
p l S C l C S l S l = + + + (7)
Las Ec. (5), (6) y (7) forman el modelo cinemtico directo del robot SCORBOT
ER-V+.
Modelo Cinemtico Inverso
Las ecuaciones que conforman el modelo cinemtico inverso, se obtienen de las
relaciones geomtricas existentes en la figura 2.
u
1
Px
Py
x
y
r
0
l3
l2
x-y
Z
r 0
u
2
u
3
o
|
Pz
a) Esquema
superior
b) Esquema lateral
Figura 2. Esquemas de relacin entre las coordenadas articulares y la posicin
final
El modelo cinemtico inverso esta formado por las siguientes ecuaciones:
1
y
x
P
arctg
P
u
| |
=
|
\ .
(8)
2 2 2 2 2
3 2
2
2 2 2 2 2
3
2
x y z
z
x y x y z
P P P l l
P
arctg arccos
P P l P P P
u
| | | |
+ + +
| |
=
| |
+ + +
\ . \ .
(9)
2
3
3
3
1 cos
arctg
cos
u
u
u
| |
|
=
|
\ .
,
2 2 2 2
2 3
3
2 3
2
z
r P l l
cos
l l
u
+
= (10)
MODELO DINMICO
El modelo dinmico del robot manipulador se obtiene por medio de las
ecuaciones de Euler-Lagrange [4], como primer paso se deben obtener las
energas cinticas de los eslabones del robot manipulador. En un robot
manipulador la energa cintica se encuentra conformada por suma de la energa
cintica traslacional y la energa cintica rotacional.
( )
2 2
1 1
,
2 2
i i i
K q q m v I u = + (11)
Enseguida, se obtienen las energas potenciales de los eslabones del robot
manipulador.
( )
i i
U q m gh = (12)
Como tercer paso se obtiene el Lagrangiano del sistema. El cual se encuentra
determinado por la diferencia entre la energa cintica total
1
y la energa potencial
total
2
.
( ) ( ) ( ) , , L q q K q q U q = (13)
1
La energa cintica total de un robot manipulador esta determinada por la suma
de las energas cinticas de cada uno de sus eslabones.
2
La energa potencial total de un robot manipulador esta determinada por la suma
de las energas potenciales de cada uno de sus eslabones.
Enseguida, se desarrolla la siguiente ecuacin para cada una de las
coordenadas articulares.
i i
d L L
dt
t
u u
| | c c
=
|
c c
\ .
(14)
A continuacin se detalla el desarrollo del modelo dinmico del robot SCORBOT
ER-V+ por medio de las ecuaciones de Euler-Lagrange. Como primer paso se
obtienen las energas cinticas de cada uno de los eslabones. Como el primer
eslabn, solamente rota alrededor del eje z, nicamente cuenta con energa
cintica rotacional.
( )
2
1 1 1
1
,
2
K I u u u = (15)
Para los siguientes eslabones las ecuaciones de sus energas cinticas son las
siguientes:
( ) ( )
2 2 2 2 2 2 2
2 2 2 2 2 2 1 2 1 2
1 1
, cos
2 2
c c
K m l l I u u u u u u u ( = + + +
(16)
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 2 2 2 2 2 2 2 2 2 2
3 3 3 2 3 3 3 3 3 2 3 3 2 2 3 2 3 2 2 3 1 3 3 2 3 1
2
2 2 2 2
3 2 2 1 3 2 3 3 2 2 3 3 1 2 3
1 1 1 1
, cos cos cos
2 2 2 2
1 1
cos cos
2 2
c c c c c
c
K m l m l m l m l m l l m l
m l m l l I
u u u u u u u u u u u u u u
u u u u u u u u u
= + + + + + + +
(
+ + + + + +
(
(17)
( ) ( ) ( ) ( )
( ) ( ) ( )
2 2 2 2 2 2 2 2 2 2 2
4 3 2 3 3 3 2 3 2 2 2 3 2 2 3 1 3 2 3 1
2 2 2
2 2 1 2 3 3 2 2 3
1 1 1 1
, cos cos cos
2 2 2 2
1
cos cos
2
f f f f f f
f f
K m l m l m l m l m l l m l
m l m l l
u u u u u u u u u u u u u u
u u u u u u
= + + + + + + +
+ + +
(18)
Siguiendo con el proceso de modelado, se deben obtener las expresiones de las
energas potenciales.
( )
1 1
U m gh u = (19)
( ) ( )
2 2 2 2 c
U m g h l sen u u = + (20)
( ) ( ) ( )
3 3 2 2 3 2 3 c
U m g h l sen l sen u u u u = + + + (21)
( ) ( ) ( )
4 2 2 3 2 3 f
U m g h l sen l sen u u u u = + + + (22)
El Lagrangiano del sistema es el siguiente:
( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
2 2 2 2 2 2 2 2 2 2 2 2 2 2 2
1 1 2 2 2 2 2 1 2 1 2 3 3 2 3 3 3 3 3 2 3 3 2 2
2 2 2 2 2 2 2
3 2 3 2 2 3 1 3 3 2 3 1 3 2 2 1 3 2 3 3 2 2 3
1 1 1 1 1 1
, cos
2 2 2 2 2 2
1 1
cos cos cos cos cos
2 2
c c c c c
c c c
L I m l l I m l m l m l m l
m l l m l m l m l l
u u u u u u u u u u u u u
u u u u u u u u u u u u u
( = + + + + + + + +
+ + + + + + +
+
( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( )
2
2 2 2 2 2 2 2 2 2
3 1 2 3 3 2 3 3 3 2 3 2 3 2 2 3 1 2 2
2 2 2 2 2 2
3 2 3 1 2 2 1 2 3 3 2 2 3 1 2 2 2
3 2 2 3 2 3
1 1 1 1
cos cos
2 2 2 2
1 1
cos cos cos
2 2
f f f f f
f f f c
c
I m l m l m l m l l m l
m l m l m l l m gh m g h l sen
m g h l sen l sen
u u u u u u u u u u u u
u u u u u u u u u u
u u u
(
+ + + + + + + +
(
+ + + + + +
+ + + ( ) ( )
2 2 3 2 3 f
m g h l sen l sen u u u + + +
(23)
Desarrollando la Ec. (14) para cada una de las articulaciones del robot
manipulador se obtienen las Ec. (24), (25) y (26).
( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
2 2 2
1 1 2 1 3 1 2 2 2 1 2 2 2 2 1 2 3 2 3 2 3 2 2 3 1 2
3 2 3 2 3 2 2 3 1 2 3 3 2 3 2 3 2 2 3 1
2 2
3 3 3 2 3 2 3
cos 2 cos sen 2 sen cos
2 cos sen 2 cos cos
2 sen cos
c c c f
c f c f
c f
I I I m l m l m l l m l l
m l l m l l m l l m l l
m l m l
u u u u u u u u u u u u u u
u u u u u u u u u u
u u u u u
+ + + + +
+ + + + + +
+ + +
( ) ( ) ( )
( ) ( ) ( )
2 2 2
1 2 3 3 3 3 2 3 1
2 2 2
3 2 2 2 1 2 3 2 2 1 1
cos
2 sen cos cos
c f
f f
m l m l
m m l m m l
u u u u u
u u u u u u t
+ + + +
+ + + =
(24)
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
2 2 2 2 2 2 2
2 2 3 3 3 2 3 2 2 3 3 3 3 3 2 3 2 3 3 2 3
2 2 2 2
3 2 3 2 3 3 3 3 2 3 2 3 2 2 3 1 3 2 2 2 1
3 2 3 2 3 3 3 3 2 3 2 3
2 sen
sen sen cos cos sen
cos cos
c c f f c f c f
c f c f f
c f c f
m l m l m l m l m l m l m l m l l m l l
m l l m l l m l l m l l m m l
m l l m l l m l l m l l
u u u u u
u u u u u u u u u
u u
+ + + + + + +
+ + + + + +
+ + + + ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
2
2 2 3 1 3 2 2
2 2 2 2 2
2 2 2 2 1 3 3 3 2 3 2 3 1 3 2 3 2 3 3 2
3 2 3 3 3 3 2 3 2 2 2 2 2 2
sen cos
cos sen cos sen 2 cos
cos cos
f
c c f c f
c f c
m m gl
m l m l m l m l l m l l
I m l m l g m gl I
u u u u u
u u u u u u u u u u
u u u u u u t
+ + +
+ + + + + + +
+ + + + + + + =
(25)
( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( )
2 2 2 2
3 3 3 3 3 2 3 2 3 3 2 3 3 3 3 2 2 3 3 2 3 2 3 3 2
2 2 2
3 2 3 2 2 3 1 3 2 3 3 2 3 3 2 3 2 3 1 3 2 3
3 2 3 3 2 2 3
sen sen cos
cos sen cos cos sen cos
sen
c c c f f f f
c c c f
c
m l m l m l l m l m l m l l m l l
m l l m l l m l m gl
m l l
u u u u u u u u u u u u
u u u u u u u u u u u u u
u u u u
+ + + +
+ + + + + + + +
+ + ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
2 2 2
2 3 2 2 3 1 3 2 3 2 3 1
2 3 3 2 2 3 3 3 2 3 3 2 3 3
cos sen cos sen
sen cos
f f
f c
m l l m l
m l l m gl I
u u u u u u u u u
u u u u u u u u t
+ + + + +
+ + + + + + =
(26)
Las Ec. (24), (25) y (26) forman el modelo dinmico del robot manipulador
SCORBOT ER-V+. El modelo formado por las ecuaciones anteriores puede
descomponerse en la siguiente forma:
( ) ( ) ( ) , M C g u u u u u u t + + = (27)
A continuacin se enlistan los elementos que componen a las matrices de la Ec.
(27).
( ) ( ) ( ) ( ) ( ) ( )
( )
2 2 2 2 2 2 2
11 2 2 2 3 2 3 2 2 3 3 3 3 2 3 3 2 2
2 3 2 2 3 1 2 3
cos 2 cos cos cos cos
2 cos cos
c c c f f
f
M m l m l l m l m l m m l
m l l I I I
u u u u u u u u
u u u
= + + + + + + +
+ + + + +
(28)
( )
12
0 M u = (29)
( )
13
0 M u = (30)
( )
21
0 M u = (31)
( ) ( )
2 2 2 2 2
22 2 2 2 3 3 3 2 3 2 3 3 3 3 2 2 3 3
2 cos 2 cos
c c c f f f
M m l I m l m l m l l I m l m l m l l u u u = + + + + + + + + (32)
( )
2 2
23 3 3 3 2 3 3 3 3 2 3 3
cos cos
c c f f
M m l m l l I m l m l l u u u = + + + + (33)
( )
31
0 M u = (34)
( )
2 2
32 3 3 3 2 3 3 3 2 3 3 3
cos cos
c c f f
M m l m l l m l m l l I u u u = + + + + (35)
( )
2 2
33 3 3 3 3 c f
M m l m l I u = + + (36)
( ) ( ) ( ) ( ) ( )( )
( ) ( ) ( )( ) ( )
11 3 2 3 2 3 2 2 3 2 3 2 3 2 3 2 2 3 2 3
2 2 2 2
3 3 3 2 3 2 3 2 3 3 2 2 2 2 2 2 2 2 2
, sen cos cos sen
sen cos sen cos cos sen
c f c f
c f f c
C m l l m l l m l l m l l
m l m l m m l m l
u u u u u u u u u u u
u u u u u u u u u u u u
= + + + + +
+ + + + +
(37)
( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
2 2
12 3 2 2 2 1 3 2 3 2 3 2 2 3 1 2 2 2 2 1
2 2
3 2 3 2 3 2 2 3 1 3 3 3 2 3 2 3 1
, sen cos sen cos cos sen
cos sen sen cos
f c f c
c f c f
C m m l m l l m l l m l
m l l m l l m l m l
u u u u u u u u u u u u
u u u u u u u u u
= + + +
+ + + + +
(38)
( ) ( ) ( ) ( ) ( ) ( )
2 2
13 3 2 3 2 3 2 2 3 1 3 3 3 2 3 2 3 1
, cos sen sen cos
c f c f
C m l l m l l m l m l u u u u u u u u u u u = + + + + + (39)
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
2 2
21 2 2 2 2 1 3 2 3 2 3 2 2 3 1 3 2 2 2 1
2 2
3 3 3 2 3 2 3 1 3 2 3 2 3 2 2 3 1
, cos sen cos sen cos sen
cos sen sen cos
c c f f
c f c f
C m l m l l m l l m m l
m l m l m l l m l l
u u u u u u u u u u u u
u u u u u u u u u
= + + +
+ + + + +
(40)
( ) ( ) ( )
22 3 2 3 2 3 3 3
, sen
c f
C m l l m l l u u u u = + (41)
( ) ( ) ( ) ( ) ( )
23 3 2 3 2 3 3 2 3 2 3 2 3 3 3
, sen sen
c f c f
C m l l m l l m l l m l l u u u u u u = + + (42)
( ) ( ) ( ) ( ) ( ) ( ) ( )
2 2
31 3 2 3 2 3 2 2 3 1 3 3 3 2 3 2 3 1
, cos sen cos sen
c f c f
C m l l m l l m l m l u u u u u u u u u u u = + + + + + + (43)
( ) ( ) ( )( )
32 3 2 3 2 3 3 2 3
, sen
c f
C m l l m l l u u u u u = + + (44)
( ) ( ) ( )
33 3 2 3 2 3 3 2
, sen
c f
C m l l m l l u u u u = + (45)
( )
1
0 g u = (46)
( ) ( ) ( ) ( )
2 2 2 2 3 2 2 3 3 3 2 3
cos cos cos
c f c f
g m gl m m gl m l m l g u u u u u = + + + + + (47)
( ) ( ) ( )
3 3 3 3 2 3
cos
c f
g m l m l g u u u = + + (48)
VALIDACIN DE LOS MODELOS
La validacin de los modelos cinemticos se llevo a cabo con una comparacin
de los modelos obtenidos contra los modelos que se encuentran en [1]. Se obtuvo
un resultado satisfactorio al no existir diferencias en la ubicacin del efector final.
La validacin del modelo dinmico se realiz por medio de la comparacin (en
simulacin) del modelo obtenido con el programa del Apndice C de [5].
La simulacin para la validacin del modelo dinmico se compone del
seguimiento de la trayectoria:
( )
2 2 2
400 400 400
T
q t t t t
t t t (
=
(
(49)
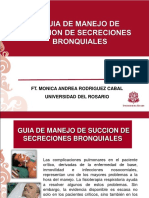
La figura 3 muestra la grfica de la diferencia entre los pares requeridos de cada
uno de los modelos para seguir la trayectoria seleccionada.
Como se ve, no existe diferencia entre la respuesta de los dos modelos.
Figura 3. Grafica de la diferencia de la respuesta de los modelos.
COSTO COMPUTACIONAL
Los modelos dinmicos de robots de ms de 2 gdl presentan una gran
complejidad, por lo cual es importante considerar los costos computacionales.
0 20 40 60 80 100 120 140 160 180 200
-2
-1
0
1
2
x 10
-15
Diferencia entre las respuestas de los modelos para el robot SCORBOT ER-V+
T
a
o
1
,
N
m
0 20 40 60 80 100 120 140 160 180 200
-10
-5
0
5
x 10
-15
T
a
o
2
,
N
m
0 20 40 60 80 100 120 140 160 180 200
-2
0
2
4
x 10
-15
T
a
o
3
,
N
m
Tiempo (seg)
En [6] se encuentran las formulas para calcular el nmero de operaciones
requeridas para obtener el modelo dinmico de un robot manipulador por la
formulacin de Newton-Euler.
126 99 n (50)
106 92 n (51)
La Ec. (50) nos muestra el nmero de multiplicaciones y la Ec. (51) nos muestra
el nmero de sumas que son requeridas por la formulacin Newton-Euler.
Para la formulacin de Euler-Lagrange (iterativa) las frmulas son las siguientes:
4 3 2
32 86 171 53 128 n n n n + + + (52)
4 3 2
25 66 129 42 96 n n n n + + + (53)
Las Ec. (52) y (53) nos dan el nmero de multiplicaciones y sumas para obtener
el modelo dinmico por medio de la formulacin iterativa de Newton-Euler.
Como se ve por simple inspeccin de las Ec. (50) a (53), la formulacin de
Newton-Euler es mucho ms eficiente. Para nuestro modelo dinmico que utiliza la
formulacin de Euler-Lagrange (cerrada) no se cuenta con una frmula para
determinar la cantidad de clculo. La tabla 2 nos muestra los clculos necesarios
para obtener el modelo dinmico del robot SCORBOT ER-V+.
Tabla 2. Operaciones para la evaluacin del modelo dinmico del robot SCORBOT
ER-V +
Formulacin Multiplicaciones Sumas Total
Newton- 279 226 505
Euler
Euler-
Lagrange
iterativa
6484 6498 12982
Euler-
Lagrange
cerrada
303 101 404
Como se ve, a travs de los nmeros presentados en la tabla 2 el modelo
dinmico obtenido por la formulacin cerrada requiere un nmero menor de
clculos.
CONCLUSIONES
En el presente documento se presenta el desarrollo del modelado cinemtico y
modelado dinmico de los tres primeros gdl del robot SCORBOT ER-V+. El
modelo dinmico se obtuvo por la formulacin de Euler-Lagrange. Los modelos
obtenidos en el documento fueron validados por comparacin con trabajos de
referencia.
El proceso de modelado cinemtico de la posicin es sencillo, lo ms
complicado que se tiene que realizar es la multiplicacin de las matrices de
transformacin para cada eslabn. El modelado dinmico de un robot manipulador
por medio de la formulacin de Euler-Lagrange cerrada es un proceso sistemtico,
sencillo de realizar y se obtiene los mismos elementos que formulaciones
iterativas.
Dependiendo de la estructura del robot manipulador la formulacin cerrada del
modelo dinmico presenta un menor costo computacional en comparacin con las
formulaciones iterativas. Si se requiere saber con exactitud el numero de clculos
que se tienen que realizar para evaluar el modelo dinmico de un robot
manipulador la formulacin iterativa de Newton-Euler representa la opcin elegir,
esto es, porque tiene un numero fijo de clculos a realizar sin importar la
estructura del robot manipulador, y porque el nmero de clculos es menor a la
formulacin de Euler-Lagrange iterativa.
Formulacin de Lagrange
La formulacin Lagrangiana es una aproximacin energtica que permite, con una
correcta eleccin de las coordenadas generalizadas del sistema, evitar el clculo
de las fuerzas de reaccin internas del mecanismo. En robtica paralela, debido a
que la relacin entre las diversas coordenadas no se puede resolver, en general,
de forma analtica, se utiliza la formulacin de Lagrange con multiplicadores de
Lagrange. Los multiplicadores de Lagrange permiten definir la dinmica del
sistema utilizando un conjunto de coordenadas generalizadas redundantes e
incluir implcitamente las relaciones entre estas coordenadas. Al igual que en el
caso de la aproximacin de N-E, algunos autores han considerado la separacin
del mecanismo en dos subsistemas para simplificar el clculo del modelo. ste es
el caso de Bhattacharya, et al; que calculan dos sistemas de ecuaciones de
Lagrange, uno para cada subsistema, y los combinan utilizando la matriz
Jacobiana del robot, obteniendo as el modelo completo del robot.
Diferencia entre la energa cintica y potencial de un mecanismo.
Ecuaciones de movimiento para el manipulador.
Reemplazando por la definicin de L.
Vector de torques/esfuerzo.
El resultado que va a ser utilizado es el siguiente:
Dada una masa puntual m con una coordenada generalizada qi (posicin o
ngulo), la relacin entre qi y la fuerza o torque F1 aplicada sobre ella est dada
por:
Donde: L: Lagrangeano del manipulador
F1: esfuerzo o torque de la junta 1
Es la diferencia entre Energa cintica y potencial de todo el sistema.
L = K1 + K2 - P1 - P2
Donde: K: Energa cintica P: Energa potencial
Para cada manipulador se puede calcular un Lagrangeano.
En un ejemplo se ver la aplicacin bsica del Lagrangeano para masas
puntuales.
Ejemplo para -r
m1 = 10 Kg. m2 : entre 1 y 5 Kg.
r1 = 1 m r2 : entre 1 y 2 m.
Velocidades mx.: 1 rad/seg. y 1 m/seg.
Acel. mx.: 1 rad/seg2 y 1 m/seg2.
Ejemplo Simple de Aplicacin
Masa m1
- x1 = r1 cos x1 = - r1 sen
- y1 = r1 sen y1 = r1 cos
- v1 2 = (x1)2 + (y1)2 = r1 2 2 (sen2 + cos2) = r1 2 2
- K1 = m1 (r1 2 2) P1 = m1 g r1 sen
Clculo de K2 y P2
Masa m2
- x2 = r2 cos x2 = r2 cos - r 2 sen
- y2 = r2 sen y2 = r2 sen + r2 cos
- v2 2 = r22 + r2 2 2
- K2 = m2 (r22 + r2 2 2) P2 = m2 g r2 sen
El Lagrangeano ser...
- L = m1 r1 2 2 + m2 r22 + m2 r2 2 2 - m1g r1 sen - m2 g r2 sen
-
Para la Junta Rotacional...
- L / = m1 r1 2 + m2 r2 2
- L / = - g cos (m1 r1 + m2 r2)
- d / dt (L / ) = m1 r1 2 + m2 r2 2 + 2 m2 r2 r2
- = m1 r1 2 + m2 r2 2 + 2 m2 r2 r2 + g cos (m1 r1 + m2 r2)
Y para la Junta Prismtica...
- L / r2 = m2 r2
- d / dt(L / r2) = m2 r2
- L / r2 = m2 r2 2 - m2 g sen
de donde,
- Fr2 = m2 r2 - m2 r2 2 + m2 g sen
Caractersticas del Modelo Dinmico
El modelo es no lineal en funcin de las variables de junta.
Podemos tener parmetros variables (por ejemplo masa de la ltima junta).
Las ecuaciones estn interrelacionadas
No existen soluciones generales analticas exactas.
Esto hace que el modelo dinmico sea un conjunto de ecuaciones no-lineales
acopladas
Caractersticas del modelo dinamico.
El modelo dinmico obtenido por esta forma no contempla rozamientos o no
linealidades (torsin, juegos de piezas, etc.) sino slo fuerza de Coriolis, gravedad,
acoplamiento de inercia y fuerza centrfuga.
El Modelo Dinmico...
se calcula una sola vez
consideramos cadenas cinemticas abiertas
no se consideran no linealidades, o sea que slo consideraremos los
aspectos dinmicos estructurales
las ecuaciones que obtenemos de cada junta son NO LINEALES y
ACOPLADAS.
Modelo Dinmico Generalizado
El Modelo Dinmico as obtenido est en el espacio de las juntas y a los fines del
control del manipulador...
Las variables de entrada son los esfuerzos que se aplican en las juntas
(son n).
Las salidas son variables de movimiento (, , ).
Modelo Dinmico Generalizado en el Espacio Cartesiano
Si consideramos el esfuerzo con respecto al ambiente
Cuntas entradas se tienen?
6 (espacio Cartesiano)
Modelo generalizado en el espacio Cartesiano:
Para pasar de uno a otro:
premultiplicando por la inversa de JT:
F
Modelo Matemtico Generalizado:
Mx: es la matriz de inercia. Es el conjunto de masas que el robot presenta al
ambiente (en cada eje mx, my, mz)
DINMICA DE LAGRANGE (EJEMPLO)
Considerando el siguiente mecanismo.
El lagrangiano se construye de la siguiente manera.
La energa cintica esta dada por:
Y la correspondiente energa cintica es:
As, el lagrangiano se escribe de la siguiente manera.
la ecuacin de Lagrange (1), se construye de la siguiente manera
por lo que el modelo dinmico en este caso es
Falta agregar el amortiguador
Reescribiendo el modelo en el espacio de estado, de la forma donde,
.
Entonces el sistema queda:
Los puntos de equilibrio son:
el estado q1 queda indeterminado ya que no aparece en el modelo del espacios
de estados. Si se propone un control de la siguiente forma
Entonces el origen ser un equilibrio
para cualquier valor de k .
Para realizar un anlisis de estabilidad utilizando el segundo mtodo de Lyapunov,
se propone como funcin candidata a
se asume que la funcin propuesta es positiva definida. Aplicando el mtodo se
calcula su derivada temporal
Sustituyendo el sistema
Simplificando se llega a la siguiente forma de
Donde, debido a los valores que toman, , y , respectivamente, no se puede
establecer ninguna conclusin respecto a al estabilidad del sistema. Pero si se
hace k=0 en el control entonces y resulta que algebraicamente.
por lo que se puede establecer la siguiente conclusin:
El sistema es localmente estable en el origen de manera uniforme.
CONCLUSIONES.
En este trabajo se ha presentado una metodologa para el clculo del modelo
dinmico de robots paralelos.
El mtodo, basado en la formulacin de Lagrange, combina las ideas de trabajo
previos para crear un mtodo genrico, capaz de definir un modelo en trminos de
nicamente las articulaciones activas o en trminos de las articulaciones activas y
pasivas. La consideracin de sensores extra explcitamente en el modelo puede
ser utilizada en tcnicas de control basada en modelo para obtener un mejor
rendimiento de control, una mayor robustez ante imprecisiones del modelo y una
mejora del error de posicionamiento y seguimiento de trayectoria. El mtodo
propuesto es sistemtico, basado en matrices, que puede ser fcilmente aplicado.
El mtodo se ilustra con la obtencin del modelo dinmico para el mecanismo
anterior.
Anda mungkin juga menyukai
- Enfoque de La JusticiaDokumen3 halamanEnfoque de La JusticiaBea0% (1)
- Ensayo Niño de La Pijama de RayasDokumen5 halamanEnsayo Niño de La Pijama de RayasAle AlanizBelum ada peringkat
- Herzog y MeuronDokumen2 halamanHerzog y MeuronDayanaBelum ada peringkat
- Anteproyecto Grupo #1Dokumen33 halamanAnteproyecto Grupo #1planificacionuasdsanjuan planificacionuasdsanjuanBelum ada peringkat
- Clasificación de Cuentas de ContabilidadDokumen10 halamanClasificación de Cuentas de ContabilidadSerrano AndréBelum ada peringkat
- MOPECE1Dokumen34 halamanMOPECE1Andrea Luladasilva0% (1)
- Enfoque Disciplina Formativa Convive en La EscuelaDokumen4 halamanEnfoque Disciplina Formativa Convive en La Escuelabontes67100% (1)
- Repaso General Del Segundo TrimestreDokumen2 halamanRepaso General Del Segundo TrimestreNoemi AriasBelum ada peringkat
- Aspectos de La Superacion PersonalDokumen2 halamanAspectos de La Superacion PersonalEmanuel Hernández75% (4)
- Beata Laura Vicuña PinoDokumen2 halamanBeata Laura Vicuña PinoPastoral CEMABelum ada peringkat
- Informe VI Cromatografía en ColumnaDokumen6 halamanInforme VI Cromatografía en ColumnaYeferson Andres Mayorga ArenalesBelum ada peringkat
- La Guerra. Su Conducción Política y Estratégica. GDD. Manuel Montt Martínez. Memorial Del Ejército #354. (1970)Dokumen261 halamanLa Guerra. Su Conducción Política y Estratégica. GDD. Manuel Montt Martínez. Memorial Del Ejército #354. (1970)Bibliomaniachilena100% (1)
- Teoria ConductistaDokumen17 halamanTeoria ConductistajesusBelum ada peringkat
- MANDATO ESPECIAL para VenderDokumen2 halamanMANDATO ESPECIAL para VenderLester Camposeco0% (1)
- A# 4.ejvg - UvmDokumen7 halamanA# 4.ejvg - UvmErik Jerzaird Velazquez100% (1)
- Geometria I y IIDokumen54 halamanGeometria I y IIhenrryBelum ada peringkat
- Copia de Calculo de Poblacion Flotante en España - noPWDokumen11 halamanCopia de Calculo de Poblacion Flotante en España - noPWJosé CuéllarBelum ada peringkat
- Informe Relación No LinealDokumen5 halamanInforme Relación No LinealLola PorrasBelum ada peringkat
- Uso de La ComaDokumen14 halamanUso de La Comasijoje4161Belum ada peringkat
- Consecuencias Principales de La Pobreza en MéxicoDokumen5 halamanConsecuencias Principales de La Pobreza en MéxicoCindy Mis PereiraBelum ada peringkat
- Analisis de InteligenciaDokumen14 halamanAnalisis de InteligenciaManuel Angel Soto RomeroBelum ada peringkat
- Pa3 PSC Clinica y de La SaludDokumen28 halamanPa3 PSC Clinica y de La SaludYOAO EMERSON ROJAS ARIAS100% (1)
- Formas de SaneamientoDokumen6 halamanFormas de SaneamientoJhoselin CamposBelum ada peringkat
- Higiene BronquialDokumen94 halamanHigiene BronquialNathaliaBelum ada peringkat
- Trastorno de Pánico y Agorafobia (Guía de Intervención) - Jesús Rodríguez Goñi PDFDokumen207 halamanTrastorno de Pánico y Agorafobia (Guía de Intervención) - Jesús Rodríguez Goñi PDFCarlos Reyes Urbina50% (2)
- Grupo 10 - Educacion en Valores para La Etica Profesional-WordDokumen35 halamanGrupo 10 - Educacion en Valores para La Etica Profesional-WordlilianvillalbaBelum ada peringkat
- Principios Básicos en PsicologíaDokumen4 halamanPrincipios Básicos en PsicologíaLLAEBelum ada peringkat
- Abraham Maslow y Carl RogerDokumen6 halamanAbraham Maslow y Carl RogerJorge Castellano100% (1)
- Bulbo RaquídeoDokumen46 halamanBulbo RaquídeoCarmen Camila SocualayaBelum ada peringkat