Anda mungkin juga menyukai
- EWAEWC Pair Trade Kalman FilterDokumen4 halamanEWAEWC Pair Trade Kalman FilterJasonClarkBelum ada peringkat
- Kalman Filter For DummiesDokumen5 halamanKalman Filter For DummiesManuel Pineda Delgado100% (4)
- Projects With Microcontrollers And PICCDari EverandProjects With Microcontrollers And PICCPenilaian: 5 dari 5 bintang5/5 (1)
- % BPSKDokumen10 halaman% BPSKMajd ShakhatrehBelum ada peringkat
- Mobile Robots Perception NavigationDokumen704 halamanMobile Robots Perception NavigationCarlos Morones HernándezBelum ada peringkat
- Modelling and Estimation of WWTPDokumen184 halamanModelling and Estimation of WWTPGökhan TurhanBelum ada peringkat
- Beier Radio - Dynamic Positioning Induction CourseDokumen171 halamanBeier Radio - Dynamic Positioning Induction CourseManuel Gomez33% (3)
- Understanding and Applying Kalman FilteringDokumen37 halamanUnderstanding and Applying Kalman FilteringosamazimBelum ada peringkat
- Period Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Dokumen75 halamanPeriod Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Nguyen Quoc DoanBelum ada peringkat
- Period Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Dokumen75 halamanPeriod Start Time WS: RRC Setup Success Rate eRAB Setup Success Rate (All Services)Nguyen Quoc DoanBelum ada peringkat
- Salim Khan Electronic Information Engineering Super Visor Prof Bai LinDokumen26 halamanSalim Khan Electronic Information Engineering Super Visor Prof Bai Linsaalim_khan1Belum ada peringkat
- Export LNBTS 26feb1623Dokumen2.763 halamanExport LNBTS 26feb1623Nguyen Quoc DoanBelum ada peringkat
- Export LNBTS 26feb1623Dokumen2.763 halamanExport LNBTS 26feb1623Nguyen Quoc DoanBelum ada peringkat
- Matlab CodeDokumen3 halamanMatlab CodeBhavish ParkalaBelum ada peringkat
- Target Tracking Using KalmanDokumen13 halamanTarget Tracking Using KalmanAmit Kumar Karna100% (8)
- Period Tracking Using Autocorrelation - DadorranDokumen7 halamanPeriod Tracking Using Autocorrelation - DadorranGustavo Trigueiros IIBelum ada peringkat
- Código em MATLAB 6Dokumen4 halamanCódigo em MATLAB 6SOST HUMAPBelum ada peringkat
- Markimoo Comapps PrintDokumen9 halamanMarkimoo Comapps PrintMark Danielle BahintingBelum ada peringkat
- Pulse Code ModulationDokumen16 halamanPulse Code ModulationKissi MissiBelum ada peringkat
- Appendices: Appendix A: Complete BEM CodeDokumen12 halamanAppendices: Appendix A: Complete BEM CodeJohn KerryBelum ada peringkat
- All CodesDokumen8 halamanAll Codesa7med.3mvrBelum ada peringkat
- 1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Dokumen4 halaman1/22/13 11:58 AM C:/Users/Solo... /uwb - SV - Eval - CT - 15 - 4a.m 1 of 4Solo NunooBelum ada peringkat
- ROB521 Visual OdysseyDokumen7 halamanROB521 Visual Odyssey11 1Belum ada peringkat
- M.E CS-1 Lab ManualDokumen78 halamanM.E CS-1 Lab Manualselvaece2010Belum ada peringkat
- TEL 432 E: Digital Image ProcessingDokumen22 halamanTEL 432 E: Digital Image ProcessingDeep ManBelum ada peringkat
- Assignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseDokumen7 halamanAssignment No: 1 Statement: Write Down The Matlab Program For Falling Parachutist CaseAshutosh KattiBelum ada peringkat
- Código em MATLAB 2Dokumen8 halamanCódigo em MATLAB 2SOST HUMAPBelum ada peringkat
- ROB521 Assignment 3Dokumen7 halamanROB521 Assignment 311 1Belum ada peringkat
- Matlab Code of Image CompressionDokumen5 halamanMatlab Code of Image CompressionRohit Xavier0% (1)
- Detect Skin Regions in Images Using Color ThresholdingDokumen7 halamanDetect Skin Regions in Images Using Color ThresholdingJeremy KipgenBelum ada peringkat
- MatlabcodesDokumen26 halamanMatlabcodesjose mirandaBelum ada peringkat
- Digital Modulation and DemodulationDokumen11 halamanDigital Modulation and DemodulationpoornimaBelum ada peringkat
- Código em MATLAB 4Dokumen4 halamanCódigo em MATLAB 4SOST HUMAPBelum ada peringkat
- Detect pitch using time-domain and frequency-domain algorithmsDokumen12 halamanDetect pitch using time-domain and frequency-domain algorithmshazoorbukhshBelum ada peringkat
- Low Pass Filter Matlab ProgramingDokumen3 halamanLow Pass Filter Matlab ProgramingDebobrataBelum ada peringkat
- ImplementationDokumen14 halamanImplementationTamilSelvanBelum ada peringkat
- Experiment No: 13 Transient and Steady State Response AnalysisDokumen28 halamanExperiment No: 13 Transient and Steady State Response Analysisayesha amjadBelum ada peringkat
- Appendix - III: MATLAB Program For Examples of Chapter 5 Example 5.1 (Case 1), Single Support ExcitationDokumen7 halamanAppendix - III: MATLAB Program For Examples of Chapter 5 Example 5.1 (Case 1), Single Support ExcitationAkshay NaikBelum ada peringkat
- Código em MATLAB 4Dokumen6 halamanCódigo em MATLAB 4SOST HUMAPBelum ada peringkat
- Matlab Code:: All AllDokumen5 halamanMatlab Code:: All AllnoybitBelum ada peringkat
- Full Text 21Dokumen9 halamanFull Text 21SatishReddyBelum ada peringkat
- CodeDokumen5 halamanCodeAbhay SharmaBelum ada peringkat
- MATLAB Source Codes for Image Thresholding and Edge DetectionDokumen10 halamanMATLAB Source Codes for Image Thresholding and Edge DetectionMohammed AlmalkiBelum ada peringkat
- All All: %PROBLEM 2.1Dokumen10 halamanAll All: %PROBLEM 2.1Ravindranath ShrivastavaBelum ada peringkat
- Filtrare Un SegnaleDokumen35 halamanFiltrare Un SegnaleMatteo PicanoBelum ada peringkat
- Código em MATLAB 1Dokumen8 halamanCódigo em MATLAB 1SOST HUMAPBelum ada peringkat
- Rakshk Acs LabDokumen18 halamanRakshk Acs LabRakesh AseryBelum ada peringkat
- AudioDokumen2 halamanAudiowalikarim73Belum ada peringkat
- Assignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseDokumen3 halamanAssignment No: 1: Statement: Write Down The Matlab Program For Falling Parachutist CaseAkshay WalimbeBelum ada peringkat
- Código em MATLAB 5Dokumen6 halamanCódigo em MATLAB 5SOST HUMAPBelum ada peringkat
- Delta and Adaptive Delta ModulationDokumen6 halamanDelta and Adaptive Delta Modulationabc abcBelum ada peringkat
- Nyquist Bode Root Locus MATLABDokumen7 halamanNyquist Bode Root Locus MATLABAnirudh MittalBelum ada peringkat
- For For If Else EndDokumen3 halamanFor For If Else EndhikolBelum ada peringkat
- Noisympc MDokumen4 halamanNoisympc Mjiugarte1Belum ada peringkat
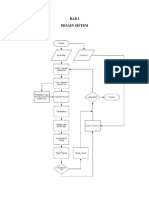
- Bab I Desain Sistem: 1.1 Blok DiagramDokumen4 halamanBab I Desain Sistem: 1.1 Blok DiagramRini Apriyanti PurbaBelum ada peringkat
- Introduction To Wireless Systems - P M Shankar - Solutions Manual PDFDokumen246 halamanIntroduction To Wireless Systems - P M Shankar - Solutions Manual PDFmienimeez94% (17)
- Thong-Tin-Vo-Tuyen - Ofdm-Code - (Cuuduongthancong - Com)Dokumen10 halamanThong-Tin-Vo-Tuyen - Ofdm-Code - (Cuuduongthancong - Com)Toàn - K2 Nguyễn VănBelum ada peringkat
- ME End Sem ProgramsDokumen8 halamanME End Sem ProgramsThirumal ValavanBelum ada peringkat
- Listing Code Voice RecognitionDokumen11 halamanListing Code Voice RecognitionRivanto ParungBelum ada peringkat
- Object Follower CodeDokumen3 halamanObject Follower Codes2sarathBelum ada peringkat
- Kilian 2009 CodeDokumen25 halamanKilian 2009 CodeJongkol NaenonBelum ada peringkat
- Digitalcom Lab Manual NewDokumen26 halamanDigitalcom Lab Manual NewAkanksha DixitBelum ada peringkat
- % Program Dragforce % Se Hyung Oh Adapted From Professor Farenthold's Notes % Input Paramaters%Dokumen6 halaman% Program Dragforce % Se Hyung Oh Adapted From Professor Farenthold's Notes % Input Paramaters%COOL GUYBelum ada peringkat
- Ans Problem 1: Matlab CodeDokumen11 halamanAns Problem 1: Matlab CodeUmer QureshiBelum ada peringkat
- Mean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsDokumen5 halamanMean Square Error Estimation of A Signal: Part B: Matlab or Labview ExperimentsJUVERIA N ZBelum ada peringkat
- DSP Lab ManualDokumen51 halamanDSP Lab ManualShahin4220Belum ada peringkat
- NamesDokumen8 halamanNamesNicole VerdugoBelum ada peringkat
- Matlab Tips and Tricks for Processing Signals and ImagesDokumen14 halamanMatlab Tips and Tricks for Processing Signals and Imagesfilip100Belum ada peringkat
- %nama: Bunga Mega Putu Ijayanti %NIM: 2315106010 %tugas Sintesa Proses % Set % X 0.7 % Ra 0.95 % RB 0.95Dokumen2 halaman%nama: Bunga Mega Putu Ijayanti %NIM: 2315106010 %tugas Sintesa Proses % Set % X 0.7 % Ra 0.95 % RB 0.95Bunga Mega PutuBelum ada peringkat
- Matlab Program For Gauss Elimination Method With Partial PivotingDokumen6 halamanMatlab Program For Gauss Elimination Method With Partial PivotingDinesh JangraBelum ada peringkat
- 4G Template KPIDokumen295 halaman4G Template KPINguyen Quoc DoanBelum ada peringkat
- 4G Template KPIDokumen295 halaman4G Template KPINguyen Quoc DoanBelum ada peringkat
- 4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 03-13 48 52 148Dokumen156 halaman4G KPI-WS RSLTE-LNBTS-2-hour-PM 15245-2020 11 03-13 48 52 148Nguyen Quoc DoanBelum ada peringkat
- Badcell 3G NSN 02 11Dokumen4.281 halamanBadcell 3G NSN 02 11Nguyen Quoc DoanBelum ada peringkat
- 4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Dokumen237 halaman4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Nguyen Quoc DoanBelum ada peringkat
- Period Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRDokumen223 halamanPeriod Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRNguyen Quoc DoanBelum ada peringkat
- Network data by PLMN, RNC, WBTS and WCELDokumen484 halamanNetwork data by PLMN, RNC, WBTS and WCELNguyen Quoc DoanBelum ada peringkat
- RRC and ERAB Success RatesDokumen616 halamanRRC and ERAB Success RatesNguyen Quoc DoanBelum ada peringkat
- 4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Dokumen237 halaman4G KPI province-WS RSLTE-LNBTS-2-hour-PM 21241-2020 12 09-08 25 49 622Nguyen Quoc DoanBelum ada peringkat
- Period Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRDokumen223 halamanPeriod Start Time WS: Cell Avail Total E-UTRAN RRC Conn STP SR E-Utran E-Rab STP SRNguyen Quoc DoanBelum ada peringkat
- 3G Network KPI ReportDokumen60 halaman3G Network KPI ReportNguyen Quoc DoanBelum ada peringkat
- RSLTE037 - Service Retainability-PLMN-day-rslte LTE19 Reports RSLTE037 xml-2021 02 26-15 53 33 168Dokumen118 halamanRSLTE037 - Service Retainability-PLMN-day-rslte LTE19 Reports RSLTE037 xml-2021 02 26-15 53 33 168Nguyen Quoc DoanBelum ada peringkat
- KPI Volte-RSLTE-LNCEL-2-whole period-PM 21261-2021 02 24-11 23 14 112Dokumen161 halamanKPI Volte-RSLTE-LNCEL-2-whole period-PM 21261-2021 02 24-11 23 14 112Nguyen Quoc Doan0% (1)
- QoS DGI KTM v1.3Dokumen59 halamanQoS DGI KTM v1.3Nguyen Quoc DoanBelum ada peringkat
- RSRAN135 - WBTS Usage overview-RSRAN-WBTS-day-rsran WCDMA17 Reports RSRAN135 xml-2019 09 03-10 07 23 259Dokumen106 halamanRSRAN135 - WBTS Usage overview-RSRAN-WBTS-day-rsran WCDMA17 Reports RSRAN135 xml-2019 09 03-10 07 23 259Nguyen Quoc DoanBelum ada peringkat
- Network data by PLMN, RNC, WBTS and WCELDokumen484 halamanNetwork data by PLMN, RNC, WBTS and WCELNguyen Quoc DoanBelum ada peringkat
- Export LNBTS FDD 26feb1623Dokumen194 halamanExport LNBTS FDD 26feb1623Nguyen Quoc DoanBelum ada peringkat
- Export MultiTable 26feb1621Dokumen701 halamanExport MultiTable 26feb1621Nguyen Quoc DoanBelum ada peringkat
- RSRAN045 - ISHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN045 xml-2019 09 06-14 45 14 72Dokumen14 halamanRSRAN045 - ISHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN045 xml-2019 09 06-14 45 14 72Nguyen Quoc DoanBelum ada peringkat
- ErrorrDokumen1 halamanErrorrNguyen Quoc DoanBelum ada peringkat
- Export MultiTable 26feb1621Dokumen701 halamanExport MultiTable 26feb1621Nguyen Quoc DoanBelum ada peringkat
- RSRAN046 - SHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN046 xml-2019 09 06-15 08 24 560Dokumen10 halamanRSRAN046 - SHO Adjacencies-CELLPAIR-whole Period-Rsran WCDMA17 SQL Reports RSRAN046 xml-2019 09 06-15 08 24 560Nguyen Quoc DoanBelum ada peringkat
- File Mau Cell GroupDokumen2 halamanFile Mau Cell GroupNguyen Quoc DoanBelum ada peringkat
- Kpi ZteDokumen4 halamanKpi ZteNguyen Quoc DoanBelum ada peringkat
- Khai Thêm TRX DNO v1Dokumen3 halamanKhai Thêm TRX DNO v1Nguyen Quoc DoanBelum ada peringkat
- DanhsachcellDokumen2 halamanDanhsachcellNguyen Quoc DoanBelum ada peringkat
- Paper 96Dokumen4 halamanPaper 96Attilio Stefano PresuttiBelum ada peringkat
- Energies: SOC and SOH Joint Estimation of The Power Batteries Based On Fuzzy Unscented Kalman Filtering AlgorithmDokumen15 halamanEnergies: SOC and SOH Joint Estimation of The Power Batteries Based On Fuzzy Unscented Kalman Filtering AlgorithmrxBelum ada peringkat
- Lecture Notes - Econometrics: The Kalman Filter: Paul S OderlindDokumen4 halamanLecture Notes - Econometrics: The Kalman Filter: Paul S OderlindMADHAVI BARIYABelum ada peringkat
- UK-PHD Filter: An Iterated-Update Implementation: SCJ Robertson 2 December, 2016Dokumen30 halamanUK-PHD Filter: An Iterated-Update Implementation: SCJ Robertson 2 December, 2016eetahaBelum ada peringkat
- Nonlinear Estimation - Methods and Applications With Deterministic Sample Points-CRC Press (2020)Dokumen277 halamanNonlinear Estimation - Methods and Applications With Deterministic Sample Points-CRC Press (2020)Ronal SalvatierraBelum ada peringkat
- Schmidt - History of Kalman Filter - Nasa ReportDokumen25 halamanSchmidt - History of Kalman Filter - Nasa Reportmandolin wind100% (1)
- Augmented UKFDokumen6 halamanAugmented UKFJang-Seong ParkBelum ada peringkat
- Real Time Implementation of MIL-STD-1553 Data Bus: Shakeel ZahidDokumen55 halamanReal Time Implementation of MIL-STD-1553 Data Bus: Shakeel ZahidKamal Raj SBelum ada peringkat
- In-Flight EstimationDokumen8 halamanIn-Flight EstimationSri SaiBelum ada peringkat
- AI and Robotics Exam QuestionsDokumen170 halamanAI and Robotics Exam QuestionsBhushan AkolkarBelum ada peringkat
- PRC PPT MtechDokumen23 halamanPRC PPT MtechsantoshBelum ada peringkat
- A Failure-Processing Scheme Based On Kalman Prediction and The Reliability Analysis For 25 KVA Generators Used On IDFDokumen24 halamanA Failure-Processing Scheme Based On Kalman Prediction and The Reliability Analysis For 25 KVA Generators Used On IDFAmilcar SánchezBelum ada peringkat
- Syllabus For ADSPDokumen3 halamanSyllabus For ADSPanittadevadasBelum ada peringkat
- 8803air PR Project1Dokumen3 halaman8803air PR Project1Zuhair MahmudBelum ada peringkat
- Educational Aerospace Project Generates Mosaics with Autonomous Rover CanSatDokumen10 halamanEducational Aerospace Project Generates Mosaics with Autonomous Rover CanSatABRAHAM CASO TORRESBelum ada peringkat
- United States Patent (10) Patent No.: US 8,126,762 B2Dokumen15 halamanUnited States Patent (10) Patent No.: US 8,126,762 B2Aryan Bin Reza 1931031630Belum ada peringkat
- Self-Tuning of Kalman Filters For Digital Protection ApplicationsDokumen4 halamanSelf-Tuning of Kalman Filters For Digital Protection ApplicationsFabien CallodBelum ada peringkat
- AI Internal Assessment Test ExplainedDokumen33 halamanAI Internal Assessment Test ExplainedsudhaBelum ada peringkat
- Mobile Robot For Power Substation Inspection: A SurveyDokumen18 halamanMobile Robot For Power Substation Inspection: A SurveyHanna Evidente BakalBelum ada peringkat
- Digital Twin - Old Wine in A New BottleDokumen20 halamanDigital Twin - Old Wine in A New BottleChristian DellaBelum ada peringkat
- Using Modelica-Matlab For Parameter Estimation in A Bioethanol Fermentation ModelDokumen13 halamanUsing Modelica-Matlab For Parameter Estimation in A Bioethanol Fermentation ModelwariascBelum ada peringkat