Cap 4
Diunggah oleh
Tiago AokiJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Cap 4
Diunggah oleh
Tiago AokiHak Cipta:
Format Tersedia
Sumario
I Controle Contnuo 1
1 Introdu c ao 3
1.1 Sistemas de Controle em Malha Aberta e em Malha Fechada . . . . . . . . . . . . . . . . 5
1.2 Componentes de um sistema de controle . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3 Compara c ao de Sistemas de Controle em Malha Aberta e em Malha Fechada . . . . . . . 6
1.4 Aplica c oes em Engenharia Eletrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5 Uma breve hist oria da engenharia de controle . . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Modelagem e representa c ao de sistemas de controle 11
2.1 Introdu c ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2 Modelos de sistemas fsicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.2.1 Redu c ao de ordem e din amica n ao-modelada . . . . . . . . . . . . . . . . . . . . . 11
2.2.2 Obten c ao de modelos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3 Representa c ao de Sistemas Atraves de Diagramas de Bloco . . . . . . . . . . . . . . . . . 12
2.3.1 Elementos b asicos do diagrama de blocos . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.2
Algebra de Diagramas de Blocos . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.4 Diagrama de uxo de sinal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.4.1 Elementos e deni c oes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4.2 Caminhos que n ao se tocam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4.3
Algebra de diagramas de uxo de sinal . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.4 Constru c ao do diagrama de uxo de sinal . . . . . . . . . . . . . . . . . . . . . . . 18
2.4.5 Regra de Mason . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.5 Representa c ao generica de sistemas de controle por diagramas de blocos . . . . . . . . . . 21
3 Resposta de sistemas de controle 27
3.1 Introdu c ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 Sistemas de primeira e segunda ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Resposta no tempo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3.1 Sistemas de primeira ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.2 Sistemas de segunda ordem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.3.3 Efeito dos zeros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
3.4 Resposta em freq uencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.5 Resposta no tempo e na freq uencia de sistemas em malha fechada . . . . . . . . . . . . . 34
ii SUM
ARIO
3.6 Resposta em freq uencia e rudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3.7 Conclus oes sobre o efeito de p olos e zeros . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4 Propriedades B asicas de Sistemas Realimentados 37
4.1 Introdu c ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Propriedades e Fun c oes de transferencia b asicas . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2.1 Rastreamento ou seguimento da referencia (precis ao) . . . . . . . . . . . . . . . . . 38
4.2.2 Rejei c ao de perturba c oes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2.3 Sensibilidade ao rudo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2.4 Sensibilidade parametrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.2.5 Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3 Estudo de Caso: Controle de velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.3.1 Modelo do sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.3.2 Rastreamento e rejei c ao de perturba c oes . . . . . . . . . . . . . . . . . . . . . . . . 41
4.3.3 Sensibilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.4 Rastreamento Din amico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
4.4 Rastreamento em regime permanente (precis ao) e tipo de sistema . . . . . . . . . . . . . . 44
4.4.1 Rastreamento e sinais padr ao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.4.2 Tipos de sistema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
4.5 Estabilidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.5.1 Estabilidade Entrada-Sada (BIBO-estabilidade) . . . . . . . . . . . . . . . . . . . 50
4.5.2 Estabilidade Interna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
4.5.3 Criterio de Estabilidade de Routh-Hurwitz . . . . . . . . . . . . . . . . . . . . . . 52
4.5.4 Lugar das razes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
4.5.5 Estabilidade no domnio da freq uencia . . . . . . . . . . . . . . . . . . . . . . . . . 73
Parte I
Controle Contnuo
CAP
ITULO 4
Propriedades Basicas de Sistemas Realimentados
4.1 Introdu cao
O objetivo deste captulo e estudar propriedades b asicas de um sistema de controle realimentado. Es-
tas propriedades est ao relacionadas ao comportamento do sistema com rela c ao a seguimento de uma
referencia, efeito de perturba c oes e varia c oes parametricas, e comportamento din amico do sistema. O
seguimento de uma referencia e o efeito de perturba c oes s ao caracterizados principalmente pelos erros
do sistema em regime permanente. Varia c oes parametricas inuenciam no comportamento do sistema
segundo a sensibilidade do sistema com rela c ao aos par ametros. Finalmente uma exigencia fundamental
para um sistema de controle e a estabilidade. Esta caracterstica intrnseca do sistema assegura que ap os
uma perturba c ao limitada, a sada do sistema n ao aumentar a indenidamente. Neste captulo, estas
quest oes s ao inicialmente examinadas atraves de um exemplo. A seguir um estudo detalhado de cada
aspecto e apresentado.
4.2 Propriedades e Fun c oes de transferencia basicas
Nesta se c ao analisaremos algumas fun c oes de transferencia relacionadas ` as propriedades que queremos
estudar, especialmente o seguimento de referencias e o efeito de perturba c oes e rudo. O diagrama de
blocos do sistema e representado na Figura 4.1.
D(s)
C(s) G(s)
R(s) E(s) Y (s)
N(s)
+
+
+ +
Figura 4.1: Congura c ao com realimenta c ao unit aria
Podemos considerar na fun c ao de transferencia da Figura 4.1, as entradas como sendo a referencia
R(s), a perturba c ao D(s) e o rudo N(s). A sada Y (s) e dada por
Y (s) =
GC(s)
1 +GC(s)
R(s)
G(s)
1 +GC(s)
GC(s)
1 +GC(s)
N(s) (4.2.1)
38 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Podemos ent ao considerar tres fun c oes de transferencia de interesse.
A fun c ao de transferencia
Y (s)
R(s)
=
GC(s)
1 +GC(s)
(4.2.2)
relaciona a sada com a referencia e e chamada de fun c ao de sensibilidade complementar.
A fun c ao de transferencia
Y (s)
D(s)
=
G(s)
1 +GC(s)
(4.2.3)
relaciona a sada com a perturba c ao e e chamada de fun c ao de sensibilidade ` a perturba c ao.
A fun c ao de transferencia
Y (s)
N(s)
=
GC(s)
1 +GC(s)
(4.2.4)
relaciona a sada com o rudo e e chamada de fun c ao de sensibilidade ao rudo.
Alem destas tres fun c oes de podemos denir uma quarta fun c ao de transferencia denida como
1 fun c ao de sensibilidade complementar (4.2.5)
Esta fun c ao de transferencia corresponde ` a rela c ao entre o erro e a referencia, ou seja,
E(s)
R(s)
=
1
1 +GC(s)
(4.2.6)
Propriedades importantes de sistemas de controle em malha fechada podem analisadas a partir das
propriedades destas fun c oes de transferencia. A seguir analisaremos algumas delas.
4.2.1 Rastreamento ou seguimento da referencia (precisao)
Da Equa c ao 4.2.1, considerando R(s) = N(s) = 0 segue que para obtermos um seguimento da referencia,
ou seja Y (s) R(s), deve-se ter GC(s) 1. Pode-se concluir que elevados valores de ganho na malha
direta assegura esta propriedade. Este ganho depende da planta e do controlador e varia com a freq uencia.
No entanto o maior interesse e assegurar que em regime permanente a sada siga a referencia, e um elevado
ganho do controlador em baixas freq uencias e suciente para assegurar um bom desempenho do sistema
de controle em termos de rastreamento.
4.2.2 Rejei cao de perturba c oes
Da fun c ao de transferencia 4.2.1 a perturba c ao modica o valor de sada atraves da fun c ao de sensibili-
dade ` a perturba c ao denida em 4.2.3. Neste caso o objetivo e minimizar a magnitude desta fun c ao de
sensibilidade assegurando boas propriedade de rejei c ao de perturba c ao. Isto e conseguido para elevados
valores de |1 +GC(s)|. Note que isto ocorre para elevados valores de magnitude de GC(s), quando a
fun c ao de sensibilidade ` a perturba c ao se reduz a
1
C(s)
e com ganhos elevados do controlador, tem-se
redu c ao do efeito da perturba c ao. Portanto a caracterstica do controlador que assegura rastreamento da
referencia tambem assegura a propriedade desejada de rejei c ao de perturba c ao.
4.2.3 Sensibilidade ao rudo
Da fun c ao de sensibilidade ao rudo e de 4.2.1 observa-se que o rudo afeta pouco a sada se GC(s)
0. Este requisito e conitante com os requisitos anteriores de seguimento da referencia e rejei c ao de
perturba c ao. No entanto, o rudo tem componentes de alta freq uencia e se a magnitude GC(s) tiver
valores baixos em altas freq uencias e valores elevados em baixas freq uencias, pode-se conciliar os requisitos
de rastreamento de referencia, rejei c ao de perturba c ao e baixa sensibilidade a rudos.
EEL-DAS-UFSC 39
4.2.4 Sensibilidade parametrica
Na obten c ao de modelos de sistemas parte-se da hip otese de que os valores dos par ametros s ao conhecidos
e constantes. Na realidade varia c oes nas condi c oes de opera c ao como mudan cas de temperatura, desgaste
de componentes, etc, provocam mudan cas nos valores dos par ametros. Assim, mesmo que os valores dos
par ametros tenham sido obtidos corretamente, e deve-se assinalar que, alem de possveis erros, alguns
par ametros podem ser difceis de serem determinados, o controlador projetado usando o modelo ir a operar
em um sistema cujos par ametros reais diferem do modelo.
O objetivo aqui e estudar o efeito que a varia c ao parametrica tem no ganho em regime permanente,
ou seja, o ganho entre a entrada e a sada em regime permanente. Este ganho ser a representado por T.
Na Figura 4.1 o ganho em regime permanente e dado por
GC(0)
1 +GC(0)
.
Deni c ao 6 A Sensibilidade Parametrica, do ganho T, em regime permanente, com rela c ao a um
par ametro P, e denida por S
T
P
=
T
T
P
P
Esta deni c ao e geral e pode ser aplicada com rela c ao a qualquer par ametro do sistema. A inter-
preta c ao desta deni c ao e que ela indica a varia c ao percentual do ganho para uma varia c ao percentual de
um par ametro. A deni c ao pode ser aplicada tanto para o ganho de malha aberta quanto para a malha
fechada, o que e mostrado a seguir.
Nem sempre e possvel uma aplica c ao direta desta deni c ao. Se o ganho T for uma fun c ao n ao-linear
do par ametro em rela c ao ao qual deve-se calcular a sensibilidade, ent ao a expans ao em serie de Taylor,
mantendo-se apenas os termos de primeira ordem, permite o c alculo da sensibilidade, ou seja:
T + T = T +
dT
dP
P +. . . (4.2.7)
Considerando-se apenas o termo de primeira ordem,
T =
dT
dP
P (4.2.8)
ou ainda
T
T
P
P
=
P
T
dT
dP
(4.2.9)
e portanto a sensibilidade pode ser calculada como
S
T
P
=
P
T
dT
dP
(4.2.10)
4.2.5 Estabilidade
Um sistema de controle deve ser est avel, ou seja, uma entrada limitada n ao deve produzir um aumento
ilimitado da sada. A propriedade de estabilidade ser a estudada neste captulo.
4.3 Estudo de Caso: Controle de velocidade
Esta se c ao ilustra as propriedades b asicas de um sistema de controle usando o sistema de controle de
velocidade apresentado no Captulo 1. Mas aqui consideraremos a din amica do sistema, ou seja o sistema
e representado por fun c oes de transferencia que descrevem o comportamento din amico do sistema e n ao
apenas por simples ganhos. O exemplo compara sistemas em malha aberta e malha fechada, destacando
as vantagens do sistema em malha fechada com rela c ao ` as propriedades de rastreamento de referencia,
rejei c ao de perturba c oes, sensibilidade a rudo, sensibilidade a varia c ao parametrica e estabilidade.
40 Captulo 4: Propriedades Basicas de Sistemas Realimentados
4.3.1 Modelo do sistema
Os principais componentes do sistema de controle de velocidade descrito no Captulo 1 s ao o motor de
corrente contnua e a carga.
O motor de corrente contnua e representado por 3 equa c oes:
Equa c ao da armadura
e +L
a
d i
a
d t
+R
a
i
a
= v
a
(4.3.1)
onde e e a for ca eletromotriz, v
a
e a tens ao de armadura e R
a
e L
a
s ao a resistencia e a indut ancia da
armadura, respectivamente.
Equa c ao da for ca eletromotriz
e = K
e
d
m
d t
(4.3.2)
onde
m
e o angulo mec anico e K
e
e uma constante.
E comum desprezar-se a indut ancia da armadura
quando modela-se o motor de corrente contnua em aplica c oes de controle. Aqui manteremos o modelo
completo o que levar a a um modelo de segunda ordem para o sistema.
Equa c ao do torque gerado
T
m
= K
t
i
a
(4.3.3)
onde T
m
e o torque mec anico gerado pelo motor e K
t
uma constante.
Segunda lei de Newton para o movimento de rota c ao
J
m
d
2
m
d t
2
+b
d
m
d t
+d = T
m
(4.3.4)
onde J
m
e a inercia do conjunto motor-carga, b representa um coeciente de atrito e d representa a a
varia c ao de carga que constitui a perturba c ao. Uma perturba c ao positiva corresponde a um aumento de
carga e portanto a um maior torque resistente que deve ser contrabalan cado pelo motor.
A velocidade e escolhida como vari avel de sada, ou seja, y =
m
, e as equa c oes (4.3.2) e (4.3.4) podem
ser escritas como
e = K
e
y (4.3.5)
J
m
y +by +d = T
m
(4.3.6)
Tomando-se a transformada de Laplace das Equa c oes (4.3.1), (4.3.3), (4.3.5) e (4.3.6) tem-se:
E(s) +L
a
sI
a
(s) +R
a
I
a
(s) = V
a
(s) (4.3.7)
E(s) = K
e
Y (s) (4.3.8)
T
m
(s) = K
t
I
a
(s) (4.3.9)
J
m
sY (s) +bY (s) +D(s) = T
m
(s) (4.3.10)
Isolando-se I
a
(s) na Equa c ao (4.3.7), usando-se as equa c oes (4.3.8) e (4.3.9) e substituindo-se na
Equa c ao (4.3.10) obtem-se:
Y (s) =
1
A(s)
_
K
t
bR
a
+K
e
K
t
V
a
(s) (R
a
+sL
a
)D(s)
_
(4.3.11)
onde
A(s) =
J
m
L
a
bR
a
+K
e
K
t
s
2
+
J
m
R
a
+bL
a
bR
a
+K
e
K
t
s + 1 (4.3.12)
O denominador A(s) foi escrito, por conveniencia, na forma m onica (termo independente igual a 1).
Este termo pode ser fatorado na forma
A(s) = (1 +s
1
)(1 +s
2
) (4.3.13)
EEL-DAS-UFSC 41
D(s)
K
d
(1 +s
1
)(1 +s
2
)
Controlador
K
m
(1 +s
1
)(1 +s
2
)
R(s) V
a
(s) Y (s) +
Figura 4.2: Modelo do sistema de controle de velocidade
onde
1
1
e
1
2
s ao as razes de A(s) = 0.
Denindo-se ainda K
m
=
K
t
bR
a
+K
e
K
t
e K
d
= R
a
+sL
a
o modelo do sistema pode ser escrito como
Y (s) =
K
m
(1 +s
1
)(1 +s
2
)
V
a
(s)
K
d
(1 +s
1
)(1 +s
2
)
D(s) (4.3.14)
O sistema pode ser ent ao representado pela Figura 4.2 onde R(s) correspondente ` a referencia em um
controlador a ser denido, foi includo. Usando este modelo estudaremos a seguir o comportamento do
sistema em malha aberta e em malha fechada.
4.3.2 Rastreamento e rejei cao de perturba c oes
Um dos objetivos do sistema de controle de velocidade e manter a velocidade para uma referencia especi-
cada a despeito de perturba c oes que atuem no sistema. Consideraremos os casos do sistema em malha
aberta e em malha fechada.
4.3.2.1 Controle em malha aberta
Neste caso o controlador e escolhido de modo que v
a
= Kr, e portanto o controlador e apenas um ganho
K. O ganho K e determinado de tal maneira que y(t) = r(t) no regime permanente quando d(t) = 0
Com d(t) = 0 e para assegurar que y
rp
= r o valor do ganho do controlador deve ser K =
1
K
m
. A sada
em regime permanente e dada por
y
rp
= KK
m
r
0
=
1
K
m
Kr
0
= r
0
(4.3.15)
Portanto, sem perturba c ao e possvel fazer a sada seguir a entrada com erro zero no regime perma-
nente.
Consideraremos agora o caso que alem da referencia R(s) =
r
0
s
, tem-se uma perturba c ao constante
(degrau) D(s) =
d
0
s
. Usando-se o teorema do valor nal, tem-se que
y
rp
= lim
s0
s
1
A(s
_
K
m
K
r
0
s
K
d
d
0
s
_
(4.3.16)
ou
y
rp
= r
0
K
d
d
0
(4.3.17)
O erro e dado por e(t) = r(t) y(t). Em regime permanente o erro e
e
rp
= K
d
d
0
(4.3.18)
Como n ao h a controle sobre K
d
, que depende dos par ametros do sistema, o erro e proporcional ` a
perturba c ao, sem que se possa control a-lo, podendo ser muito grande para valores elevados do dist urbio.
42 Captulo 4: Propriedades Basicas de Sistemas Realimentados
4.3.2.2 Controle em malha fechada
Neste caso a tens ao de armadura e dada por V
a
(s) = K [R(s) Y (s)]. Tem-se ent ao
Y (s) =
1
A(s)
{K
m
K [R(s) Y (s)] K
d
D(s)} (4.3.19)
Isolando-se Y (s) tem-se
Y (s) =
K
m
K
(1 +s
1
)(1 +s
2
) +K
m
K
R(s)
K
d
(1 +s
1
)(1 +s
2
) +K
m
K
D(s) (4.3.20)
Consideremos o caso sem perturba c ao, D(s) = 0 e com referencia R(s) =
r
0
s
. Usando-se o teorema
do valor nal tem-se
y
rp
=
K
m
K
1 +K
m
K
r
0
(4.3.21)
Usando-se um ganho elevado para o controlador, tem-se que
y
rp
r
0
(4.3.22)
Consideremos agora o caso onde a perturba c ao e diferente de zero, e dada por
d
0
s
. Usando-se o
teorema do valor nal, tem-se:
y
rp
=
K
m
K
1 +K
m
K
r
0
K
d
1 +K
m
K
d
0
(4.3.23)
Para valores elevados do ganho K do controlador tem-se que
KK
m
1 +K
m
K
1 e
K
d
1 +KK
m
0, ou seja
a perturba c ao afeta pouco a sada. No regime permanente, tem-se ent ao
y
rp
r
0
(4.3.24)
Observa-se que, com um valor elevado do ganho K, o efeito da perturba c ao e reduzido, ou seja a
inuencia do dist urbio d(t) no erro de regime e bem menor que em malha aberta. Deve-se observar,
no entanto, que em geral n ao e possvel aumentar o ganho do controlador a vontade, j a que restri c oes
de comportamento din amico limitam este valor. Da Equa c ao (4.3.23) observa-se ainda que a mesma
a c ao que diminui o erro ` a referencia, ou seja, o aumento de ganho, e a mesma que diminui o efeito da
perturba c ao.
4.3.3 Sensibilidade
O modelo do controle de velocidade foi obtido com a hip otese de que os valores dos par ametros s ao
conhecidos e constantes. Aqui vamos supor que uma mudan ca nos valores dos par ametros mude o valor
de K
m
para K
m
+ K
m
. N ao vamos considerar a perturba c ao e portanto n ao consideraremos eventuais
mudan cas em K
d
. Calcularemos a sensibilidade do ganho de malha aberta e do ganho em malha fechada
com rela c ao a varia c oes de K
m
.
EEL-DAS-UFSC 43
4.3.3.1 Sensibilidade do ganho de malha aberta em regime permanente
O ganho do controle e o mesmo calculado anteriormente (K =
1
K
m
), e a entrada e um degrau de valor
r
0
, como anteriormente.
y
rp
r
0
= T
MA
+ T
MA
= K(K
m
+ K
m
)
=
1
K
m
(K
m
+ K
m
)
= 1
..
T
MA
+
K
m
K
m
. .
T
MA
ent ao,
T
MA
T
MA
=
K
m
K
m
.
Aplicando-se a deni c ao de sensibilidade tem-se
S
T
MA
Km
=
T
MA
T
MA
Km
Km
= 1 (4.3.25)
No caso da malha aberta, uma varia c ao parametrica de 10% no par ametro K
m
provoca 10% de
varia c ao no ganho em regime permanente.
4.3.3.2 Sensibilidade do ganho de malha fechada em regime permanente
Para malha fechada no regime permanente T
MF
=
K
m
K
1 +K
m
K
e o ganho e uma fun c ao n ao-linear do
par ametro K
m
. Usaremos ent ao a Equa c ao (4.2.10), para calcular a sensibilidade.
Assim para a M.F. temos
S
T
MF
Km
=
K
m
T
MF
dT
MF
dK
m
=
K
m
KmK
1+KmK
K(1 +K
m
K) K(K
m
K)
(1 +K
m
K)
2
=
1
1 +K
m
K
Comparando-se este resultado com o caso de malha aberta, conclui-se que o sistema em malha fechada
e menos sensvel a varia c oes parametricas. Esta sensibilidade pode ser reduzida aumentando o ganho do
controlador.
4.3.4 Rastreamento Dinamico
Um sistema de controle deve ser capaz n ao somente de rastrear um sinal de referencia constante ou
rejeitar uma perturba c ao constante, como tambem de rastrear ou rejeitar sinais que variam no tempo.
Isto est a relacionado ` a resposta din amica do sistema, ou seja, a rapidez de resposta e amortecimento
apresentado por esta resposta.
Um controlador do tipo ganho constante, para o sistema de controle de velocidade que estamos
considerando, em malha aberta, n ao tem efeito na din amica do sistema, pois os p olos s ao dados pelo
denominador da fun c ao de transferencia 4.3.14,
1
1
e
1
2
e n ao dependem do controlador.
Para o caso de malha fechada, no entanto, o mesmo controlador modica a din amica do sistema, j a
que os p olos s ao as razes do denominador da fun c ao de transferencia 4.3.20.
44 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Da mesma maneira, a resposta ao dist urbio n ao depende do controlador, no caso da malha aberta.
Porem o controlador afeta a resposta ao dist urbio em malha fechada j a que novamente os p olos s ao as
razes da fun c ao de transferencia 4.3.20.
Uma escolha adequada do ganho K do controlador pode fornecer o desempenho transit orio desejado,
assegurando a capacidade de rastreamento din amico do sistema. A melhor escolha do ganho K do
controlador e um compromisso entre v arios fatores:
Rapidez e pouca oscila c ao da resposta ao degrau do sinal de referencia, o que est a associado ` a
posi c ao dos p olos de malha fechada.
Pouca inuencia do sinal de dist urbio e baixo erro em regime permanente, o que est a associado a
ganhos elevados.
Para conciliar estes requisitos, estruturas mais complexas de controladores podem ser necess arios. No
pr oximo captulo os requisitos de projeto e as estruturas de controladores s ao abordados em detalhe.
4.4 Rastreamento em regime permanente (precisao) e tipo de sistema
4.4.1 Rastreamento e sinais padrao
Rastreamento se refere ` a capacidade do sistema de controle de seguir (rastrear) uma referencia, ou seja, o
erro entre a referencia e a sada do sistema de controle e nula ou pequena. O erro em regime permanente
e denido como lim
t
(r(t) y(t)).
E importante observar que o estudo em regime permanente s o tem sentido se o sistema atinge um
regime permanente. Este problema est a associado ao conceito de estabilidade., que ser a estudado na
pr oxima se c ao. Aqui partimos da hip otese de que o sistema e est avel.
O erro em regime permanente e em geral estudado para 3 sinais padr ao; o degrau, a rampa e a
par abola. A raz ao da escolha destes sinais se deve ao requisito que um sistema de controle deve atender
em termos de capacidade de rastreamento. Consideremos um uma usina geradora de energia eletrica.
Um sistema de controle presente em todas as plantas geradoras e o sistema de controle de tens ao. O
objetivo e simplesmente manter a tens ao constante. Neste caso a referencia e um degrau. Consideremos
ainda o exemplo da planta de gera c ao. Um segundo la co de controle presente nestas plantas e o controle
de freq uencia. Em determinados hor arios do dia (por exemplo, de manh a cedo e ao nal do dia h a um
aumento de carga, que em geral cresce na forma de uma rampa de carga. A gera c ao deve acompanhar a
demanda e a referencia neste caso e uma rampa. Finalmente, consideremos um radar seguindo um avi ao
que acelera com acelera c ao constante. Neste caso, a referencia do sistema de controle do radar e uma
par abola.
Para o caso mais geral, a entrada de referencia e um sinal generico. A entrada de referencia, neste
caso, pode ser representada por um polin omio obtido atraves da serie de Taylor. Em muitas aplica c oes
a trajet oria de referencia n ao e conhecida a priori e por esse motivo e comum utilizar-se os primeiros
termos da serie de Taylor como base para o problema de rastreamento. A motiva c ao para isso e que se o
erro de rastreamento em regime permanente for pequeno para os primeiros termos da serie, ele tambem
ser a pequeno para uma grande classe de sinais de referencia.
4.4.2 Tipos de sistema
Sistemas est aveis s ao classicados em tipos de sistemas conforme o grau do polin omio de entrada para
o qual o erro em regime e constante. Assim, sistemas s ao do tipo 0, 1 e 2, se o erro e constante para
polin omios de entrada de graus 0, 1 e 2, respectivamente.
O tipo do sistema pode ser denido com respeito ` as entradas de referencia e/ou perturba c ao.
EEL-DAS-UFSC 45
Suponha que a referencia seja representada pela serie
r(t) =
k=0
t
k
k!
(4.4.1)
Usando superposi c ao vamos analisar o erro para cada parcela da soma, isto e, r(t) =
t
k
k!
1(t), para
um dado k, com transformada de Laplace correspondente dada por R(s) =
1
s
k+1
. Aqui 1(t) representa a
fun c ao degrau unit ario
1
.
Vamos limitar o estudo ate k = 2, mas tipos de sistema superiores a 2 poderiam ser denidos usando
o mesmo princpio. A tabela a seguir resume os sinais padr ao a serem usados.
k r(t)
0 degrau unit ario
1 rampa unit aria (inclina c ao 1)
2 par abola unit aria(derivada segunda com inclina c ao 1)
As parcelas acima recebem o nome de referencia em posi c ao (k = 0), velocidade (k = 1) e acelera c ao
(k = 2).
4.4.2.1 Tipos de sistemas quanto a entrada de referencia
Para calcular o erro de regime permanente para a entrada de referencia devemos obter a fun c ao de
transferencia de r(t) para e(t). O sistema considerado e mostrado na Figure 4.3.
D(s)
G(s)
H(s)
R(s) E(s) Y (s) +
+
Figura 4.3: Sistema para o c alculo do erro em regime
A fun c ao de transferencia T(s), entre entrada e sada, e:
Y (s)
R(s)
=
G(s)
1 +G(s) H(s)
(4.4.2)
onde T(s) e a fun c ao de transferencia de malha fechada. Como E(s) = R(s) Y (s) segue que
E(s) = (1 T(s))R(s)
Esta e a equa c ao geral do erro e pode ser usada em regime permanente ou transit orio. O interesse aqui
e o c alculo do erro em regime permanente.
Supondo-se que todos os p olos de sE(s) est ao no semi-plano esquerdo do plano complexo (parte real
negativa), o que e verdade desde que o sistema foi suposto est avel, pode-se aplicar o teorema do valor
nal para se obter o erro em regime permanente.
e
rp
= lim
s0
sE(s) = lim
s0
s
1 T(s)
s
k+1
= lim
s0
1 T(s)
s
k
(4.4.3)
46 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Tabela 4.1: Caracteriza c ao do tipo de sistemas
k lim
s0
1 T(s)
s
k
tipo do propriedade
sistema
0 constante 0 erro constante para o degrau
1 constante 1 erro constante para a rampa
2 constante 2 erro constante para a par abola
Se este limite for constante e n ao nulo ent ao o sistema e do tipo k. A Tabela 4.1 a seguir resume o
resultado para para k = 0, 1, 2. Note pela express ao do limite que um sistema do tipo 1 apresenta erro
constante para rampa e conseq uentemente erro nulo para degrau ( k = 0 ). Um sistema do tipo 2 tem
erro constante para a par abola e erros nulos para o degrau e a rampa.
Tipos de sistema no caso de realimenta c ao unit aria No caso de realimenta c ao unit aria a identi-
ca c ao do tipo de sistema e direta. O sistema considerado e mostrado na Figura 4.4.
D(s)
G(s)
R(s) E(s) Y (s) +
+
Figura 4.4: Sistema com realimenta c ao unit aria
Neste caso tem-se que 1 T(s) = 1
G(s)
1 +G(s)
=
1
1 +G(s)
e o erro e dado por
E(s) =
1
1 +G(s)
R(s)
Usando-se o teorema do valor nal temos
e
rp
= lim
s0
sE(s) = lim
s0
s
1
(1 +G(s))s
k+1
= lim
s0
1
(1 +G(s))s
k
(4.4.4)
Para um degrau k = 0 e, se o sistema e do tipo 0, o erro e constante e diferente de zero e dado por:
e
rp
=
1
1 +G(0)
=
1
1 +K
p
(4.4.5)
onde
K
P
= lim
s0
G(s) (4.4.6)
recebe o nome de ganho est atico ou constante de erro de posi c ao.
Para uma entrada em rampa, k = 1, temos
e
rp
= lim
s0
1
(1 +G(s))s
= lim
s0
1
s G(s)
(4.4.7)
1
A fun c ao degrau unit ario e comumente representada por u(t)
EEL-DAS-UFSC 47
Para o sistema ser do tipo 1 devemos ter
lim
s0
s G(s) = constante = 0 (4.4.8)
o que ocorre apenas quando G(s) possui um p olo na origem. Nessas condi c oes temos
lim
s0
s G(s) = K
v
(4.4.9)
que recebe o nome de ganho de velocidade ou constante de erro velocidade e o erro de regime e
dado por
e
rp
=
1
K
v
(4.4.10)
De forma an aloga podemos deduzir que para uma entrada do tipo par abola, k = 2, o sistema ser a do
tipo 2 se G(s) possuir 2 p olos na origem e nesse caso teremos
e
rp
=
1
K
a
(4.4.11)
onde
K
a
= lim
s0
s
2
G(s)
recebe o nome de ganho de acelera c ao ou constante de erro de acelera c ao.
Portanto, no caso de realimenta c ao unit aria, a determina c ao do tipo do sistema quanto a entrada de
referencia e trivial. Basta vericar o n umero de integradores na fun c ao de transferencia de malha direta.
A Tabela 4.2 a seguir resume este caso.
Tabela 4.2: Resumo de tipos no caso de realimenta c ao unit aria
Tipo G(s) Erro ao degrau Erro ` a rampa Erro ` a par abola
0 K
p
1 +b
1
s +b
2
s
2
+ +b
m
s
m
1 +a
1
s +a
2
s
2
+ +a
n
s
n
1
1 +K
p
1
K
v
s
1 +b
1
s +b
2
s
2
+ +b
m
s
m
1 +a
1
s +a
2
s
2
+ +a
n
s
n
0
1
K
v
2
K
a
s
2
1 +b
1
s +b
2
s
2
+ +b
m
s
m
1 +a
1
s +a
2
s
2
+ +a
n
s
n
0 0
1
K
a
Exemplo 4.4.1 Dado o sistema representado na Figura 4.5, que representa um problema de rastrea-
mento de satelite por uma antena, determine o tipo do sistema com rela c ao ` a entrada de referencia.
1
s(1 +s)
h
r
a(t) y +
Figura 4.5: Problema de rastreamento de um satelite por uma antena
48 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Seja G(s) =
1
s(1 +s)
. O erro e dado por
E(s) = R(s) Y (s)
= R(s)(1 T(s))
= R(s)
_
1
G
1 +hG
_
=
1 + (h 1)G
1 +hG
R(s)
O erro de regime permanente para uma entrada degrau unit ario e ent ao dado por
e
rp
= lim
s0
sE(s)
= lim
s0
s
1 + (h 1)G
1 +hG
1
s
=
h 1
h
Para h = 1 (realimenta c ao n ao unit aria) o sistema e do tipo 0 (embora exista um integrador). Para
h = 1, e
ss
= 0 e o sistema e do tipo 1.
4.4.2.2 Tipo do Sistema com Rela c ao ` a entrada de Perturba c ao
Da mesma forma como denimos tipo de sistema para entrada referencia, podemos denir tipo de sistema
para entradas de perturba c ao. No caso da perturba c ao, e importante entender o signicado do erro. Para
isto, consideramos a referencia como zero. O erro ser a e(t) = r(t) y(t) = y(t). Portanto, em regime
permanente
e
rp
= lim
s0
s E(s)
= lim
s0
s Y (s)
Portanto, para calcular o erro ` a entrada de perturba c ao basta obter a fun c ao de transferencia entre
perturba c ao e sada e aplicar a mesma ideia anterior, isto e, o sistema e do tipo 0 se perturba c oes do tipo
degrau resultam um erro constante em regime permanente. Ser a do tipo 1 se uma perturba c ao rampa
ocasiona um erro constante e assim por diante.
A sada e calculada, com R(s) = 0, por
Y (s) = T
d
(s)D(s) (4.4.12)
onde T
d
e a fun c ao de transferencia entre a entrada de perturba c ao e a sada.
Para o caso especial de realimenta c ao unit aria, o tipo do sistema ser a determinado pelo n umero de
integradores localizados antes do ponto onde a perturba c ao e injetada. Um sistema do tipo 1 implica que
a perturba c ao constante (degrau) n ao afeta a sada em regime permanente. Do mesmo modo, para um
sistema do tipo 2, perturba c oes constantes ou em rampa n ao afetam a sada.
Exemplo 4.4.2 Tipo de sistema para um motor CC. Seja o sistema de controle de posi c ao com motor
DC, representado na Figura 4.6.
Os par ametros s ao = 1, A = 1, K
l
= 1. Determine o tipo do sistema e propriedades com respeito
` a:
a. referencia em degrau;
b. perturba c ao em degrau;
EEL-DAS-UFSC 49
+ +
+
D(s)
R(s) Y (s)
-
?
?
- - -
6
-
K
l
K
1
s
A
s + 1
Figura 4.6: Sistema de controle de posi c ao com motor CC
c. referencia em rampa.
Solu c ao:
a. F.T. de r para y (d = 0)
T(s) =
1
s(s + 1) +k
Erro do sistema:
E(s) = R(s)[1 T(s)] =
s(s + 1) +k 1
(s(s + 1) +k
R(s)
Para entrada em degrau R(s) =
1
s
e
rp
= lim
s0
s
s(s + 1) +k 1
s(s + 1) +k
.
1
s
=
k 1
k
Para k = 1 temos e
rp
= 0 embora exista um integrador no canal direto e o sistema e do tipo 0.
Vamos alterar um pouco a estrutura para considerar o caso onde a realimenta c ao e unit aria, como
mostrado na Figura 4.7.
W(s)
K
l
K
A
s(s + 1)
R(s) Y (s) +
+
4
Figura 4.7: Congura c ao com realimenta c ao unit aria
Neste caso, o integrador no canal direto e capaz de eliminar erros da resposta ao degrau. Agora a
nova fun c ao de transferencia e
Y (s)
R(s)
= T(s) =
k
s(s + 1) +k
50 Captulo 4: Propriedades Basicas de Sistemas Realimentados
e para R(s) =
1
s
(degrau unit ario) temos
e
rp
= lim
s0
sE(s) = 0
para qualquer K.
b. Para as duas congura c oes a fun c ao de transferencia do dist urbio para a sada Y e
Y (s)
D(s)
= T
d
(s) =
1
s(s + 1) +k
e para um dist urbio constante (degrau unit ario) temos
e
rp
= Y
rp
=
1
k
sistema tipo 0.
Logo o sistema e incapaz de rejeitar a perturba c ao completamente. O integrador no canal direto
n ao e capaz de eliminar o erro de regime porque o dist urbio e injetado antes do integrador.
Em resumo: A F.T. de r para e, na gura (a) com k = 1 e na gura (b) com k arbitr ario, e
E(s)
R(s)
=
s(s + 1)
s(s + 1) +k
A presen ca do zero na origem (zero bloqueante) provocou erro nulo para degrau de referencia.
Como n ao existe zero bloqueado na F.T.
E(s)
w(s)
o sistema n ao e capaz de rejeitar perturba c oes cons-
tantes.
c. Para entrada em rampa temos:
e
ss
= lim
s0
sE(s) = lim
s0
s(s + 1) +k 1
s(s + 1) +k
1
s
2
k = 1 =:e
ss
=
k = 1 =:e
ss
=
1
k
= 1.
O erro e o mesmo para a gura (b).
4.5 Estabilidade
Todo sistema de controle deve ser capaz de operar em regime permanente e quando isto ocorre dizemos
que o sistema e est avel.
Estudaremos a seguir duas formas de se caracterizar a estabilidade de um sistema: estabilidade
entrada-sada e estabilidade interna.
4.5.1 Estabilidade Entrada-Sada (BIBO-estabilidade)
Deni c ao 7 Um sistema e BIBO-est avel se entradas limitadas produzem sadas limitadas.
O termo BIBO-estabilidade vem das iniciais em ingles da express ao Bounded Iinput-Bounded
Output, ou seja, entrada limitada-sada limitada.
Deni c ao 8 Um sinal m(t) e limitado se existe um n umero M tal que m(t) M, t.
EEL-DAS-UFSC 51
Por esta deni c ao, o seno e limitado, enquanto uma rampa e um sinal ilimitado. Assim, uma entrada
senoidal em um sistema est avel vai produzir uma sada limitada. J a uma rampa, que e um sinal ilimitado,
pode produzir um sinal de sada ilimitado mesmo em um sistema est avel.
Seja h(t) a resposta ao impulso do sistema. A seguir ser a demonstrado que um sistema e est avel se,
e somente se, a integral
|h()|d for limitada, ou seja,
|h()|d <
A resposta y(t) do sistema ao sinal de entrada u(t) e dada por
y(t) =
h()u(t )d (4.5.1)
Se u(t) e limitado ent ao existe em M tal que |u| M < e conseq uentemente
|y| =
h()u(t )d
|h()||u(t )|d
M
|h()|d
logo a sada ser a limitada se
|h()|d for limitada, ou seja a condi c ao de suciencia foi demonstrada.
Por outro lado, supondo que
h()d n ao e limitada, perguntamos se ainda y(t) pode ser limitada,
ou seja queremos provar a condi c ao de necessidade da integral ser limitada. Como y(t) deve ser limitada
para todos os sinais de entrada limitados, basta escolher o sinal de entrada seguinte
_
u(t ) = 1, se h() > 0
u(t ) = 1, se h() < 0
(4.5.2)
que resulta no sinal de sada
y(t) =
h()u(t )d =
|h()|d (4.5.3)
que s o e limitado se
|h()|d for limitada. Portanto esta e uma condi c ao necess aria.
Seria difcil demonstrar a estabilidade de um sistema a partir da deni c ao de BIBO-estabilidade.
Innitos sinais limitados deveriam ser aplicados e as sadas correspondentes observadas. Felizmente
existe um resultado que n ao demonstramos aqui, que permite um criterio simples para a determina c ao
da estabilidade.
A integral
|h()|d e limitada se, e somente se, a fun c ao de transferencia a entrada e sada do
sistema n ao possui p olos sobre o eixo imagin ario ou no lado direito do plano complexo.
Conclus ao: Um sistema e BIBO-est avel se, e somente se, sua fun c ao de transferencia
n ao possuir p olos sobre o eixo imagin ario no semi-plano direito.
52 Captulo 4: Propriedades Basicas de Sistemas Realimentados
4.5.2 Estabilidade Interna
Deni c ao 9 Um sistema linear e internamente est avel se para entrada nula e qualquer condi c ao inicial
a resposta tende assintoticamente para zero.
A resposta de entrada nula e condi c oes iniciais dadas podem ser representadas por
Y (s) =
b
0
s
m
+b
1
s
m1
+... +b
m
s
m
+a
1
s
n1
+... +a
n
=
k(s z
1
)...(s z
m
)
(s p
1
)...(s p
n
)
onde, p
i
(z
i
) s ao as razes do denominador(numerador), b
i
, z
i
s ao constantes denidas pelas condi c oes
iniciais. p
i
s ao os p olos da fun c ao de transferencia T(s) =
Y (s)
R(s)
do sistema. Os par ametros a
i
, e portanto
os p olos p
i
dependem dos par ametros fsicos do sistema e n ao das condi c oes iniciais.
No domnio do tempo, a resposta e
y(t) =
n
i=1
k
i
e
p
i
t
(4.5.4)
onde k
i
depende das condi c oes iniciais e p
i
s ao os p olos do sistema.
Da Equa c ao (4.5.4) segue que y(t) tende assintoticamente para zero se, e somente se, todos os p olos
da fun c ao de transferencia possurem parte real negativa, isto e Re(p
i
) < 0.
Note que para sistemas lineares invariantes no tempo as duas no c oes de estabilidade acima estudadas
s ao equivalentes e dependem apenas dos p olos da fun c ao de transferencia satisfazerem a condi c ao Re(p
i
) <
0.
4.5.3 Criterio de Estabilidade de Routh-Hurwitz
O estudo da estabilidade de sistemas de controle consiste em vericar a localiza c ao dos p olos de malha
fechada da fun c ao de transferencia do sistema. Os p olos s ao as razes do polin omio denominador desta
fun c ao. Existem v arios metodos para se testar a localiza c ao das razes de um polin omio. Em particular
esses metodos s ao uteis na determina c ao de faixas (intervalos) onde os coecientes do polin omio podem
se encontrar de tal forma que suas razes tenham parte real negativa garantindo assim a estabilidade.
Seja o polin omio
a(s) = a
n
s
n
+a
n1
s
n1
+... +a
1
s +a
0
(4.5.5)
Este polin omio pode ser fatorado da forma
a(s) = a
n
(s p
1
)(s p
2
) . . . (s p
n
) (4.5.6)
onde p
i
, com i = 1 . . . n, s ao as razes do polin omio, e a
n
e suposto positivo.
Fazendo-se a multiplica c ao dos fatores, tem-se
a(s) = a
n
_
s
n
(
n
i
p
i
)s
n1
+ (
das razes combinadas duas a duas)
(
das razes combinadas tres a tres) + + (1)
n
(p
1
p
2
. . . p
n
)
_
Observa-se que uma raiz nula implica no termo independente nulo. No caso de um sistema de controle,
se o polin omio denominador da fun c ao de transferencia tiver o termo independente nulo, isto j a implica em
sistema inst avel. Qualquer outro coeciente nulo s o pode ocorrer se existirem razes com sinais opostos.
Tambem da Equa c ao (4.5.7) segue que, se o sistema for est avel, ent ao cada coeciente do polin omio ser a
positivo. Uma mudan ca de sinal dos coecientes do polin omio j a indica razes no lado direito fechado do
EEL-DAS-UFSC 53
plano complexo. No entanto, embora as condi c oes de que todos os coecientes sejam diferentes de zero
e n ao apresentem mudan ca de sinal sejam necess arias, elas ainda n ao s ao sucientes para garantir que
todas as razes est ao no lado esquerdo plano complexo.
Em 1874 Routh desenvolveu um criterio direto de estabilidade, que permite vericar a localiza c ao
das razes de um polin omio sem que elas sejam explicitamente calculadas. Este criterio usa a tabela ou
arranjo mostrado a seguir.
s
n
a
n
a
n2
a
n4
4 . . .
s
n1
a
n1
a
n3
a
n
5 . . .
s
n2
b
1
b
2
b
3
. . .
s
n3
c
1
c
2
c
3
. . .
.
.
.
s
2
s
1
s
0
onde:
b
1
=
a
n
a
n2
a
n1
a
n3
a
1
=
a
n1
a
n2
a
n3
a
n1
b
2
=
1 a
n4
a
1
a
n5
a
n1
=
a
n1
a
n4
a
n5
a
n1
b
3
=
1 a
n6
a
1
a
n7
a
n1
=
a
n1
a
n6
a
n7
a
n1
c
1
=
a
n1
a
n3
b
1
b
2
b
1
=
b
1
a
n3
a
n1
b
2
b
1
c
2
=
a
n1
a
n5
b
1
b
3
b
1
=
b
1
a
n5
a
n1
b
3
b
1
c
3
=
a
n1
a
n7
b
1
b
4
b
1
=
b
1
a
n7
a
n1
b
4
b
1
Este arranjo e construdo seguindo um procedimento sistem atico.
1. Na linha correspondente a s
n
colocam-se os coecientes do polin omio em ordem decrescente com
rela c ao ao grau dos termos, come cando com o grau n, e pulando o coeciente seguinte. Assim, os
coecientes de grau n 2, n 4 e assim sucessivamente, s ao posicionados.
2. Na linha seguinte, correspondente a s
n1
, colocam-se os coecientes do polin omio que foram pulados
na primeira linha, em ordem decrescente quanto ao grau.
3. Os coecientes das linhas seguintes s ao calculados usando as duas linhas anteriores, como indicado
acima.
4. Para as linhas correspondentes ao termos s
1
e s
0
, existe apenas um termo.
Criterio de Routh O n umero de razes no semi-plano direito e igual ao n umero de mudan cas de
sinal na primeira coluna da tabela. Portanto todas as razes est ao no semi-plano esquerdo se todos os
elementos da primeira coluna da tabela tiverem o mesmo sinal (positivos se a
n
> 0).
54 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Exemplo 4.5.1 O polin omio
a(s) = s
6
+ 4s
5
+ 3s
4
+ 2s
3
+s
2
+ 4s + 4
possui todos os coecientes positivos. Verique se todas as razes est ao no SPE.
Solu c ao: Construmos o arranjo de Routh,
s
6
1 3 1 4
s
5
4 2 4 0
s
4
b
1
b
2
b
3
s
3
c
1
c
2
c
3
s
2
d
1
d
2
s
1
e
1
e
2
s
0
f
1
onde os elementos s ao calculados por
b
1
=
1 3
4 2
4
=
5
2
b
2
=
1 1
4 4
4
= 0 b
3
=
1 4
4 0
4
= 4
c
1
=
4 2
2, 5 0
2, 5
= 2 c
2
=
4 4
2, 5 4
2, 5
=
12
5
c
3
=
4 0
2, 5 0
2, 5
= 0
d
1
=
2, 5 0
2
12
5
2
= 3 d
2
=
2, 5 4
2 0
2
= 4
e
1
=
2
12
5
3 4
3
=
76
15
e
2
=
2 0
3 0
3
= 0
f
1
=
3 4
76
15
0
76
15
= 4
Como existem 2 trocas de sinal nos elementos da primeira coluna, conclumos que existem 2 razes
fora do SPE.
4.5.3.1 Propriedades e casos especiais
Existem algumas propriedades que simplicam a aplica c ao do criterio de Routh-Hurwitz ou permitem
resolver alguns casos especiais, como o aparecimento de zeros na primeira coluna. Estes resultados s ao
teoremas, mas n ao apresentaremos demonstra c oes destes resultados.
Teorema 1 (Divis ao ou multiplica c ao de uma linha por um n umero) Os coecientes de qualquer
linha podem ser multiplicados ou divididos por um n umero positivo.
EEL-DAS-UFSC 55
Exemplo 4.5.2 A ser apresentado em aula
Teorema 2 (Coeciente nulo na primeira coluna) Quando o primeiro elemento de uma das linhas
for nulo, mas existem elementos diferente de zero na mesma linha, 3 procedimentos podem ser usados
para aplicar o criterio de Routh-Hurwitz:
1. Substituir s por
1
x
, onde x e uma nova vari avel em fun c ao da qual o polin omio ser a escrito. A
tabela e ent ao construda usando o novo polin omio.
2. Multiplicar o polin omio por (s+a), com a > 0. Por conveniencia, escolhe-se a = 1. O procedimento
introduz uma raiz no polin omio localizada no semi-plano esquerdo e portanto n ao altera o resultado
do criterio de Routh-Hurwitz.
3. Substituir o zero por = 0, pequeno e com o mesmo sinal do termo da linha anterior, na primeira
coluna, e prosseguir com a aplica c ao do metodo. O sinal dos elementos da primeira coluna e
determinado considerando que 0.
Exemplo 4.5.3 A ser apresentado em aula
Teorema 3 (Uma linha nula) Quando todos os elementos de uma linha forem nulos o polin omio tem
razes sobre o eixo imagin ario ou reais simetricas em rela c ao ao eixo imagin ario. Para o caso de sistemas
de controle isto j a indica instabilidade, mas a aplica c ao do criterio de Routh-Hurwitz produz informa c oes
importantes sobre a natureza das razes do sistema e e interessante prosseguir com a aplica c ao do criterio.
Se a i-esima linha e nula, formamos o seguinte polin omio auxiliar
a
1
(s) =
1
s
i+1
+
2
s
i1
+
3
s
i3
+. . . (4.5.7)
onde
i
s ao os coecientes da linha anterior (i 1). Em seguida substitumos a linha nula pela linha
formada com os coecientes da derivada de a
1
(s) e completamos a tabela. Ao resultado obtido com a
tabela deve-se adicionar o fato de que as razes de a
1
(s) tambem s ao razes de a(s).
Exemplo 4.5.4 Dado o polin omio
a(s) = s
5
+ 5s
4
+ 11s
3
+ 23s
2
+ 28s + 12 (4.5.8)
s
5
1 11 28
s
4
5 23 12
s
3
6, 4 25, 6
s
2
3 12
s
1
0 0 a
1
(s) = 3s
2
+ 12
Nova s
1
6 0
da
1
ds
= 6s
s
0
12
N ao h a mudan ca de sinal na primeira coluna, logo todas as razes est ao no semi-plano esquerdo,
exceto aquelas razes que tambem s ao razes de a
1
(s) e que estiverem sobre o eixo imagin ario
a
1
(s) = s
2
+ 4 = 0 e, portanto s = 2j
Uma aplica c ao importante do criterio de Routh-Hurwitz em sistemas de controle e a determina c ao
da faixa de valores de um par ametro para o qual o sistema e est avel. O exemplo a seguir ilustra esta
aplica c ao.
56 Captulo 4: Propriedades Basicas de Sistemas Realimentados
K
s + 1
s(s 1)(s + 6)
R(s) Y (s) +
Exemplo 4.5.5 Determine a faixa de ganho K para a qual o sistema da Figura 4.5.5, e est avel.
A equa c ao caracterstica e
1 +K
s + 1
s(s 1)(s + 6)
= 0
ou s
3
+ 5s
2
+ (K 6)s +K = 0
Aplicando-se o criterio de Routh temos
s
3
1 K 6
s
2
5 K
s
1
(K K(K 6))
1
s
0
s
0
K
Para a estabilidade devemos ter K > 0 e 5K 30 K > 0 e portanto K >
30
4
4.5.3.2 Estabilidade relativa
Algumas vezes h a interesse em saber n ao somente se o sistema e est avel, mas tambem se todas as razes
est ao em uma regi ao a esquerda de uma linha, por exemplo, a esquerda de s =
1
, com
1
> 0. O
criterio de Routh-Hurwitz pode ainda ser aplicado, com uma transla c ao de eixos, movendo a origem para
s =
1
.
A transla c ao do eixo e dada por
s = z
1
(4.5.9)
Observe que a origem na referencia s deve corresponder a
1
na referencia z e portanto a transforma c ao
a ser usada e f acil de ser determinada.
Exemplo 4.5.6 Para o sistema com equa c ao caracterstica
s
3
+ 7
2
+ 25s + 39 = 0 (4.5.10)
deseja-se testar se todas as razes est ao a esquerda de 1.
Usamos a transforma c ao s = z 1, e obtemos a nova equa c ao caracterstica
z
3
+ 4z
2
+ 14z + 20 = 0 (4.5.11)
Formando-se o arranjo de Routh obtem-se
z
3
1 14
z
2
4 20
z
1
9
z
0
20
Portanto, todas as razes da equa c ao original est ao a esquerda de s = 1 no plano s.
EEL-DAS-UFSC 57
4.5.4 Lugar das razes
A tecnica do Lugar Geometrico das Razes (LGR) ou simplesmente Lugar das Razes (LR) e um metodo
gr aco para plotar o lugar das razes no plano s correspondente ` a varia c ao de um par ametro do sistema.
Este metodo fornece uma medida da sensibilidade das razes do sistema a uma varia c ao do par ametro
em considera c ao.
O metodo permite avaliar o ajuste de par ametros do sistema de forma a se obter uma resposta
satisfat oria no que diz respeito ao lugar geometrico das razes.
O princpio b asico do metodo e a rela c ao existente entre os p olos da Fun c ao de Transferencia em
Malha Fechada (FTMF) e os p olos e zeros da Fun c ao de Transferencia em Malha Aberta (FTMA) e o
seu ganho.
As principais vantagens do metodo s ao as seguintes:
a solu c ao exata e detalhada dos regimes transit orios e permanente pode ser obtida facilmente. Isto
devido ao fato de os p olos de malha fechada serem diretamente obtidos do lugar geometrico das
razes.
solu c oes aproximadas podemser obtidas com uma consider avel redu c ao de trabalho, quando solu c oes
exatas n ao s ao requeridas.
O objetivo desta se c ao e a apresenta c ao do metodo de constru c ao do lugar geometrico das razes e a
interpreta c ao dos resultados.
Exemplo 4.5.7 Exemplo introdut orio Considere o sistema de controle em MF mostrado na Figura
4.8.
K
1
s(s +p)
R(s) Y (s) +
Figura 4.8: Diagrama de blocos do sistema de 2a. ordem
A FTMF deste sistema de 2
a
ordem e igual a
Y (s)
R(s)
=
K/s(s +a)
1 +K/s(s +a)
=
K
s
2
+as +K
onde a equa c ao caracterstica e expressa como
a(s) = s
2
+as +K = 0
A aplica c ao do criterio de Routh-Hurwitz nesta equa c ao fornece
s
2
s
1
s
0
1 K
a 0
K
O sistema e est avel se K > 0 e p > 0. Se uma destas (ou as duas simultaneamente) condi c oes n ao
for satisfeita (isto e, K < 0 e/ou p < 0), o sistema ser a inst avel.
Varia c ao das razes da equa c ao caracterstica a(s) = 0
As razes da equa c ao caracterstica mostrada anteriormente s ao dadas por
s
1,2
=
p
_
p
2
4K
2
para as quais s ao observados os seguintes casos:
58 Captulo 4: Propriedades Basicas de Sistemas Realimentados
4K < p
2
: razes reais e diferentes
4K = p
2
: razes reais e iguais
4K > p
2
: razes complexas conjugadas
Vamos estudar a varia c ao da posi c ao dos p olos da fun c ao de transferencia, ou seja, das razes da
equa c ao caracterstica para dois par ametros, o ganho K e o par ametro p, o qual est a associado ` a posi c ao
do p olo de malha aberta.
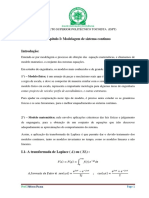
1. Supondo p = 2, observe a varia c ao das razes para < K < +. As razes da equa c ao
caracterstica s ao dadas, neste caso, por s
1,2
= 1
1 K.
Para diferentes faixas de varia c ao do ganho tem-se:
< K < 0: 2 razes, uma positiva e outra negativa
K = 0: s
1
= 0 e s
2
= 2 ; ou seja, as razes s ao os p olos da FTMA
0 < K < 1: s
1
e s
2
s ao n umeros reais negativos
K = 1: s
1
= s
2
= 1
1 < K < +: razes complexas conjugadas com partes reais iguais a -1
O lugar das razes e apresentado na Figura 4.9.
3.0 2.6 2.2 1.8 1.4 1.0 0.6 0.2 0.2 0.6 1.0
40
30
20
10
0
10
20
30
40
50
60
K = 0
K
K = 1 K = 0
K
Figura 4.9: LGR para varia c oes < K < +, com p = 2
2. Supondo agora que o ganho K e mantido constante com valor K = 1, vamos determinar o lugar
geometrico das razes para 0 < p < +
As razes da equa c ao caracterstica s ao dadas por
s
1,2
=
_
_
p
2
_
2
+
_
_
4K p
2
2
_
2
EEL-DAS-UFSC 59
Para diferentes faixas de varia c ao de p tem-se:
p = 0: s
1,2
= j
K (razes complexas e iguais)
p > 0
4K > p
2
_
duas razes complexas conjugadas, com parte real igual a -p/2
p
2
= 4K : duas razes reais, ambas iguais a -p/2
p
2
> 4K
p > 0
_
duas razes reais, uma positiva e outra negativa
O lugar das razes e mostrado na Figura 4.10.
11 9 7 5 3 1 1
1.2
0.8
0.4
0
0.4
0.8
1.2
a = 0
a = 0
a a
Figura 4.10: LGR para varia c oes 0 < a < +
Este exemplo mostra que e possvel plotar o Lugar Geometrico das Razes com rela c ao a varia c ao de
qualquer par ametro do sistema, embora geralmente seja o ganho o par ametro vari avel. Voltaremos a esta
quest ao posteriormente.
4.5.4.1 Fundamentos Te oricos do LGR
Considere o caso geral do sistema de controle com realimenta c ao mostrado na Figura 4.11, onde o ganho
K foi representado explicitamente. Em todo o desenvolvimento a seguir, vamos considerar o ganho como
o par ametro vari avel.
K G(s)
R(s) Y (s) +
Figura 4.11: Sistema de controle com realimenta c ao
A fun c ao de transferencia e dada por
G(s) =
s
m
+b
1
s
m1
+ +b
m
s
n
+a
1
s
n1
+ +a
n
=
b(s)
a(s)
(4.5.12)
60 Captulo 4: Propriedades Basicas de Sistemas Realimentados
e
Y (s)
R(s)
=
KG(s)
1 +KG(s)
e a fun c ao de transferencia em malha fechada.
O metodo do Lugar Geometrico das Razes plota as razes do denominador da fun c ao de transferencia
Y (s)
R(s)
, isto e, de a(s) = 1 +KG(s).
A determina c ao dos p olos da FTMF e feita ` a partir da equa c ao caracterstica 1 + KG(s) = 0. A
solu c ao desta equa c ao fornece
KG(s) = 1 (4.5.13)
Esta equa c ao pode ser desdobrada em duas outras:
|KG(s)| = 1 (4.5.14)
chamada condi c ao de m odulo e
KG(s) = (2l + 1), l = 0, 1, 2, 3, (4.5.15)
chamada condi c ao de angulo.
Estas equa c oes, chamadas equa c oes de pertinencia, por indicarem os pontos que pertencem ao lugar
das razes, estabelecem as duas condi c oes que devem ser satisfeitas para que um ponto s
t
do plano
complexo seja um p olo em malha fechada:
1. O angulo de KG(s
t
) deve corresponder ao semi-eixo real negativo do plano-s, ou seja, deve ser
180
ou um m ultiplo mpar de 180
2. O m odulo de KG(s
t
) deve ser unit ario.
Observe que a condi c ao de m odulo e equivalente a
|G(s)| =
1
K
Como o par ametro K e o par ametro vari avel, esta equa c ao ser a satisfeita para qualquer ponto
s do plano complexo. Portanto a condi c ao de pertinencia que realmente decide se um
ponto pertence ao lugar das razes e a condi c ao de angulo. A condi c ao de m odulo e
usada apenas para determinar qual o ganho para o qual o ponto e um p olo da malha fechada.
Observa c ao 1 No desenvolvimento anterior para chegar ` as condi c oes de pertinencia, consideramos o
sistema da Figura 4.11, onde a realimenta c ao e unit aria. No entanto, as condi c oes de pertinencia podem
ser derivadas para o sistema com realimenta c ao n ao-unit aria, como representado na Figura 4.12. Neste
K G(s)
H(s)
R(s) Y (s) +
Figura 4.12: Sistema de controle com realimenta c ao
caso, as condi c oes de pertinencia s ao
|KG(s) H(s)| = 1
KG(s) H(s) = (2l + 1), l = 0, 1, 2, 3,
A regra geral e usar a fun c ao de transferencia de malha aberta.
EEL-DAS-UFSC 61
E interessante interpretar as condi c oes de pertinencia em termos geometricos. Para isto basta usar a
interpreta c ao de n umeros complexos como vetores no plano complexo.
Considerando a fun c ao de transferencia G(s), com p olos dados por p
i
, i = 1, . . . n e zeros z
j
, j = 1 . . . m,
calculada em um ponto teste do plano complexo s
t
G(s) =
(s
t
z
1
)(s
t
z
2
) . . . (s
t
z
m
)
(s
t
p
1
)(s
t
p
2
) . . . (s
t
p
n
)
(4.5.16)
Cada termo s
t
z
j
corresponde a um vetor do ponto z
j
ao ponto s
t
, com m odulo |s
t
z
j
| e angulo
z
j
. Do mesmo modo, cada termo s
t
p
i
corresponde a um vetor do ponto p
i
ao ponto s
t
, com m odulo
|s
t
p
i
| e angulo
p
i
. Portanto, para que o ponto s
t
perten ca ao lugar das razes, deve-se ter que
m
j=1
z
j
n
i=1
p
i
= 180
(4.5.17)
A constru c ao do lugar geometrico das razes para um sistema particular e iniciada com a localiza c ao
dos p olos e zeros de malha aberta no plano complexo. Outros pontos do LGR podem ser obtidos,
escolhendo-se v arios pontos do teste, e determinando se eles satisfazem ou n ao a condi c ao de angulo. O
angulo de G(s) pode ser facilmente obtido em qualquer ponto de teste no plano complexo, atraves da
medi c ao dos angulos que contribuem a ele (p olos e zeros da FTMA). Por exemplo, considere o sistema
de controle por realimenta c ao onde,
FTMA = G(s) =
K(s +z
1
)(s +z
2
)
s(s +p
2
)(s +p
3
)
, K > 0 e p
1
= 0
Num ponto de teste s
t
, G(s) tem o valor:
G(s
t
) =
K(s
t
+z
1
)(s
t
+z
2
)
s(s
t
+p
2
)(s
t
+p
3
)
O angulo de G(s) e
G(s
t
) =
angulos(zeros)
angulos(p olos)
ou seja,
G(s
t
) = (s
t
+z
1
) +(s
t
+z
2
) [(s
t
) +(s
t
+p
2
) +(s
t
+p
3
)]
A Figura 4.13 ilustra geometricamente o c alculo do angulo de G(s
t
).
O ponto de teste s
t
pertence ao lugar geometrico das razes se e somente se
(
z
1
+
z
2
) (
p
1
+
p
2
+
p
3
) = 180
, 540
,
|G(s
t
)| = 1, ou seja,
K =
|s
t
| |s
t
+p
2
| |s
t
+p
3
|
|s
t
+z
1
| |s
t
+z
2
|
Se a soma algebrica dos angulos e igual a l180
, l = 1, 3, 5 o ponto s
t
pertence ao LGR. Caso
contr ario, s
t
n ao pertence ao LGR e um novo ponto dever a ser testado. No primeiro caso, as magnitudes
dos vetores (s
t
+z
i
), i = 1, n e (s
t
+p
j
), j = 1, m s ao determinadas e substitudas na equa c ao do m odulo
de G(s), para o c alculo do valor do ganho K no ponto s
t
.
Felizmente, a constru c ao do LGR n ao implica numa busca innita no plano complexo. Desde que
os zeros da equa c ao caracterstica s ao fun c oes contnuas dos coecientes, o LGR e uma curva contnua,
e, por conseguinte, deve ter certas formas gerais governadas pelo n umero e posi c ao dos p olos e zeros de
malha aberta. Uma vez estabelecidas as regras de constru c ao, a plotagem do LGR deixar a de ser tediosa
e lenta. A seguir s ao apresentadas as regras b asicas que auxiliam na determina c ao aproximada do LGR.
62 Captulo 4: Propriedades Basicas de Sistemas Realimentados
z
2
z
2
p
3
p
3
p
2
p
2
z
1
z
1
p
1
p
1
Figura 4.13: C alculo do angulo de fase de G(s)
4.5.4.2 Regras Para a Constru c ao do LGR (0 K < )
N umero de ramos O n umero de lugares geometricos separados e igual a ordem da equa c ao carac-
terstica. Portanto, tem-se tantas razes (ou ramos) do lugar das razes quanto for a ordem da
equa c ao caracterstica. Cada segmento ou ramo do lugar descreve a varia c ao de um p olo particular
do sistema em malha fechada, quando o ganho K varia na faixa 0 K < +
Come co e termino do LR Os p olos de malha aberta denem o come co do LGR (K = 0) e os zeros de
MA denem o m do LGR (K +). Isso pode ser facilmente mostrado considerando a equa c ao
|G(s
t
)| = 1 =
K|s
t
+z
1
||s
t
+z
2
|
|s
t
||s
t
+p
2
||s
t
+p
3
|
Nos p olos de malha aberta (s
t
= 0, s
t
= p
2
e s
t
= p
3
), K deve ser igual a zero para
satisfazer a equa c ao |G(s
t
)| = 1.
Nos zeros de MA (s
t
= z
1
e s
t
= z
2
), K deve tender a + para que |G(s
t
)| = 1.
Quando a ordem de denominador da FTMA for maior do que a do numerador, o lugar geometrico
terminar a em zeros no innito. O n umero de zeros no innito e a diferen ca n m entre o n umero
de p olos e o n umero de zeros.
Se c oes do eixo real que fazem parte do LR Se c oes do eixo real fazem parte do LGR se o n umero
de p olos e zeros ` a direita de um ponto de explora c ao no eixo e mpar.
Esta regra e conseq uencia direta da condi c ao de pertinencia angular. P olos e zeros sobre o eixo real,
` a esquerda do ponto teste, contribuem com angulo zero e portanto n ao tem inuencia na condi c ao
angular. Se o n umero de p olos e zeros a direita for par, a contribui c ao total ser a um m ultiplo de
360
e portanto n ao atende ` a condi c ao angular.
Assntotas e zeros no innito Para K a equa c ao G(s) =
1
K
ser a satisfeita para valores de s
tais que G(s) = 0. A condi c ao
G(s) =
(s z
1
)...(s z
m
)
(s p
1
)...(s p
n
)
= 0
pode ocorrer em duas situa c oes:
1. s = z
i
com i = 1, . . . , m, quando m = n, ou seja, para o mesmo n umero de p olos e zeros.
EEL-DAS-UFSC 63
(a) Sada do eixo real
(b) Entrada no eixo real
Figura 4.14: Pontos de separa c ao do eixo real
2. s no caso onde n > m, ou seja o n umero de p olos e maior que o n umero de zeros.
Portanto, se m e o n umero de zeros nitos e n e o n umero de p olos nitos, n m se c oes do LGR
terminam no innito, tendendo para zeros no innito.
Para K m p olos convergem para os m zeros {z
1
, ..., z
m
} e os nm p olos restantes convergem
para o innito segundo assntotas que podem ser determinadas da seguinte forma. Visto do innito
a equa c ao caracterstica pode ser aproximada por
G(s)
s
1
(s )
mn
=
1
K
onde =
P
i
z
i
n m
e o p olo medio visto do innito que tem multiplicidade nm e est a sobre
o eixo real.
Os angulos das assntotas ao lugar das razes s ao dados por
l
=
(1 + 2 l)180
n m
onde, l = 0, 1, 2, 3, , (n m1).
A intersec c ao das assntotas com o eixo real acontece em
0
, dado por
0
=
(
p olos
zeros)
(n m)
onde n e m s ao os mesmos anteriormente denidos.
O valor de
0
e basicamente o centr oide da congura c ao de p olos e zeros em MA.
Pontos de separa c ao ou m ultiplas razes O ponto de separa c ao do LGR do eixo real corresponde
ao ponto onde um ramo deixa ou entra no eixo real. Este ponto corresponde ` a existencia de razes
m ultiplas. O ponto de separa c ao corresponde ` a sada do eixo real se ocorrer entre dois p olos e ` a
entrada no eixo real se ocorrer entre dois zeros. A Figura 4.14 ilustra estes casos. Para o caso de
dois p olos, observa-se que o ganho parte de zero e aumenta ate um valor m aximo, quando ent ao o
ramo deixa o eixo real. Para o caso de dois zeros, o ramo entra no eixo real com um valor mnimo
e ent ao aumenta para innito quando atinge os zeros. Portanto pontos de separa c ao correspondem
a pontos de m aximo ou mnimo da fun c ao
K =
1
G(s)
(4.5.18)
64 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Os pontos de separa c ao podem ent ao ser facilmente obtidos calculando-se a derivada da fun c ao
K(s) =
1
G(s)
, com rela c ao a s e igualando-se a zero.
d
_
1
G(s)
_
ds
= 0 (4.5.19)
Interse cao com o eixo imagin ario A intersec c ao do LGR com o eixo imagin ario pode ser determinada
atraves do criterio de Routh-Hurwitz.
Angulo de partida (chegada) de p olos (zeros) complexos Quando existirem p olos e zeros com-
plexos, ramos do lugar das razes saem ou chegam destes p olos e zeros, respectivamente.
O angulo de sada de um p olo (ou chegada a um zero) complexo pode ser calculado aplicando-se a
condi c ao de pertinencia angular
G(s) = (2n + 1), n = 0, 1, 2,
Como desejamos apenas determinar a dire c ao na qual o lugar das razes se afasta do p olo ou se
aproxima do zero, podemos tomar um ponto teste pr oximo ao p olo (ou zero). A condi c ao angular
pode ser aplicada a este ponto, que deve pertencer ao lugar das razes. A interpreta c ao geometrica
da condi c ao angular e util para entender o metodo. Como o ponto e pr oximo ao p olo (ou zero),
mantemos como inc ognita apenas o angulo do vetor que parte do p olo (ou zero) cuja dire c ao do
lugar das razes deseja-se determinar. Os angulos dos vetores que partem dos demais p olos e zeros
do sistema e terminam no ponto teste, s ao aproximados pelos angulos dos vetores que partem destes
p olos e zeros e terminam no p olo (ou zero), cuja dire c ao do lugar das razes deseja-se determinar.
Para ilustrar este metodo, considere o sistema
G(s) =
K(s + 1)
s(s
2
+ 4s + 8)
que, para K = 0 fornece o diagrama inicial mostrado na Figura 4.15, com p
1
= 0, p
2
= 2 j2 e
p
3
= 2 j2.
p
3
p
3
p
2
p
2
z
1
z
1
p
1
p
1
s
t
Figura 4.15:
Angulo de sada de um p olo
Observe que se o ponto estiver muito pr oximo da raiz considerada, os angulos
p
1
,
p
3
e theta
z
1
ser ao aproximadamente iguais a 135
, 90
e 116.6
, respectivamente. Aplicando-se a condi c ao de
pertinencia de angulo, tem-se:
z
1
p
1
p
2
p
3
) = 180
EEL-DAS-UFSC 65
ou usando-se as aproxima c oes,
116.6
135
p
2
90
= 180
e segue que a dire c ao de afastamento do lugar das razes de p
2
e
p
2
= 71.6
Uma vez esbo cado o LGR utilizando-se as regras apresentadas, a exatid ao gr aca pode ser aumentada
determinado-se a posi c ao exata de alguns pontos. Isto pode ser facilmente realizado usando-se a equa c ao
do angulo de G(s), isto e G(s). O ganho K em qualquer ponto e determinado com auxilio da equa c ao
do m odulo de G(s), isto e |G(s)|.
Algumas observa c oes sobre o LR
1. O par ametro de interesse deve aparecer como fator multiplicativo. Se este par ametro for o ganho
K, a equa c ao caracterstica deve estar na forma
1 +KG(s) = 0
2. A fun c ao de transferencia G(s) deve estar na forma m onica como mostrado a seguir
1 +KG(s) = 1 +K
m
i=1
(s +z
i
)
n
j=1
(s +p
j
)
Exemplo 4.5.8 : Dado a planta com fun c ao de transferencia
G(s) =
K
s(s + 4)(s + 5)
determinar o LGR para o sistema em malha fechada com realimenta c ao unit aria.
N ao h a necessidade de seguir rigorosamente a seq uencia das regras dadas. Mas aqui seguiremos o
procediemnto na seq uencia indicada.
N umero de se c oes do LGR Como o sistema e de terceira ordem tem-se 3 ramos no lugar das razes.
P olos e zeros de malha aberta Os p olos e zeros de malha aberta denem o come co e m do lugar
das razes. O n umero de p olos da FTMA e 3, p
1
= 0, p
2
= 4 e p
3
= 5. Logo n = 3. O n umero
de zeros nitos da FTMA e zero. Logo m = 0. Posicionamos os p olos no plano complexo, como
mostrado na Figura ??.
Pontos do eixo real que pertencem ao lugar das razes Os segmentos do eixo real que pertencem
ao lugar das r aizes est ao entre os p olos 0 e 4 e entre 5 e . Estes segmentos s ao indicados
na Figura 4.16(b)
Assntotas Como n = 3 e m = 0, existem 3 0 = 3 zeros no innito. Portanto existir ao 3 assntotas.
A intercess ao destas assntotas com o eixo real (centr oide) e o angulo destas assntotas s ao dados
por:
_
Centr oide:
0
=
045
30
= 3
Angulos:
0
= 60
,
1
= 180
,
2
= 300
As assntotas est ao representadas na Figura ??.
66 Captulo 4: Propriedades Basicas de Sistemas Realimentados
28 24 20 16 12 8 4 0 4 8 12
30
20
10
0
10
20
30
40
50
(a) P olos da FTMA
28 24 20 16 12 8 4 0 4 8 12
30
20
10
0
10
20
30
40
50
300
180
60
(b) Assntotas
Figura 4.16: Constru c ao do LR
Pontos de separa c ao Estes pontos correspondem a pontos de m aximo ou mnimo da fun c ao K(s) =
1
G(s)
, ou
K(s) = (s
3
+ 9s
2
+ 20s)
Derivando-se com rela c ao a s e igualando-se a zero:
K
(s) = (3s
2
+ 18s + 20) = 0 : s
1,2
=
18
18
2
4 3 20
6
A solu c ao fornece duas razes, ou seja, dois pontos no eixo real:
s
1,2
=
_
1, 5
4, 5
No entanto a ultima raiz est a situada num ramo que n ao faz parte do LGR, e portanto apenas a
solu c ao s = 1.5 corresponde a um ponto de separa c ao. Veremos mais adiante o signicado da raiz
que cou fora do LR.
Interse c ao com o eixo imagin ario O criterio de Routh-Hurwitz e aplicado ` a equa c ao a(s) = s
3
+
9s
2
+K = 0
s
3
s
2
s
1
s
0
1 20
9 K
b
1
0
c
1
b
1
=
180 K
9
c
1
= K
c
1
0 e b
1
0 : K = 180
Equa c ao auxiliar:
9s
2
+K = 0 : s =
20j 4, 48j
O Lugar das Razes completo e mostrado na Figura 4.17.
EEL-DAS-UFSC 67
28 24 20 16 12 8 4 0 4 8 12
30
20
10
0
10
20
30
40
50
Figura 4.17: LGR de G(s) =
K
s(s+4)(s+5)
Exemplo 4.5.9 Construa o lugar das razes para a planta com fun c ao de transferencia
KG(s) =
K
s(s + 4)(s
2
+ 8s + 32)
N umero de se c oes do LGR O sistema e de quarta ordem tendo ent ao o lugar das razes 4 ramos.
Zeros e p olos de malha aberta Tem-se n = 4 (0, 4, 4 +j4, 4 j4)) e m = 0. Os p olos de malha
aberta s ao localizados no plano complexo como mostrado na Figura 4.18(a)
16 12 8 4 0 4 8 12
13
9
5
1
3
7
11
15
(a) P olos da FTMA
16 12 8 4 0 4 8 12
13
9
5
1
3
7
11
15
45
135
225
315
(b) Assntotas
Figura 4.18: Constru c ao do LR
Pontos que pertencem ao eixo real O lugar das razes existe no segmento entre os p olos 0 e 4,
como mostrado na Figura 4.18(a).
68 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Assntotas TEM-se n m = 4 zeros no innito, ou seja, 4 assntotas, com intercess ao com o eixo real
e com angulo das assntotas dados por:
Centr oide
A
=
4 4 + 4j 4 4j
4
= 3
Angulos:
0
= 45
,
1
= 135
,
2
= 225
,
3
= 315
Pontos de separa c ao Derivando-se a fun c ao
K(s) = (s
4
+ 12s
3
+ 64s
2
+ 128s)
obtem-se
K
(s) = (4s
3
+ 36s
2
+ 128s + 128) = 0
_
_
_
1, 58
s
2
= 3.71 + 2.55j
s
3
= 3.71 2.55j
Somente a primeira raiz tem signicado. As razes complexas s ao desconsideradas.
Intersec c ao com o eixo imagin ario Aplicando-se o criterio de Routh-Hurwitz tem-se
s
4
s
3
s
2
s
1
s
0
1 64 K
12 128 0
b
1
b
2
c
1
c
2
d
1
b
1
= 53, 33 b
2
= K 0 : K 0
c
1
=
128 53, 33 12K
53, 33
0 : K 570 c
2
= 0
d
1
= K 0 : K 0
Equa c ao auxiliar: 53, 33s
2
+K = 0 : s = 3, 25j
Angulo de partida dos p olos complexos Como existem dois p olos complexos, deve-se calcular o
angulo de partida, com o qual o ramo deixa cada p olo complexo.
p
1
+
p
2
+
p
3
+
p
4
= 180
0
p
1
+ 90
0
+
p
3
+ 90
0
= 180
0
p
1
+
p
3
= 0
0
_
_
_
3
135
0
1
135
0
2
225
0
(4.5.20)
O lugar das razes completo e mostrado na Figura 4.19
4.5.4.3 Constru c ao do LGR Para < K 0
O lugar das razes para o caso em que o par ametro e negativo, e chamado de lugar das razes comple-
mentar. Para valores do par ametro negativos, as regras de constru c ao do LR s ao alteradas. A raz ao e
essencialmente o fato de que um valor negativo introduz um angulo de 180
, o que altera a condi c ao de
pertinencia. As seguintes regras se aplicam:
Origem e termino dos ramos Considerando que as razes da equa c ao caracterstica satisfazem a equa c ao
G(s) =
b(s)
a(s)
=
1
K
segue que quando K tem-se b(s) = 0 ou s . Quando K = 0 tem-se que a(s) = 0.
Portanto, para < K < 0), o lugar das razes parte dos zeros de G(s) para K e termina
nos p olos de G(s).
EEL-DAS-UFSC 69
16 12 8 4 0 4 8 12
13
9
5
1
3
7
11
15
Figura 4.19: LGR de
K
s(s+4)(s
2
+8s+32)
Ramos sobre o eixo real Os pontos do LGR sobre o eixo real est ao ` a esquerda de um n umero par de
p olos mais zeros nitos.
Assntotas O ponto de intercess ao com o eixo real e o mesmo que para o caso de par ametro positivo e
dado por:
Centro:
0
=
(p olos em MA)
(zeros finitos em MA)
(n m)
No entanto, devido ` a contribui c ao de 180
, do par amtro negativo, os angulos das assntotas s ao
dados por
l
=
2l180
(n m)
, l = 0, 1, 2, , (n m1)
Todas as demais regras se mantem.
4.5.4.4 Cancelamento de p olos/zeros
No caso de cancelamento de p olos por zeros, a fun c ao de transferencia pode ainda apresentar o p olo
cancelado, o qual deve aparecer no lugar das razes.
Seja inicialmente o sistema apresentado na Figura 4.20.
G(s)
H(s)
R(s) Y (s) +
Figura 4.20: Cancelamento de p olo-zero
onde
G(s) =
s +c
(s +a)(s +b)
k H(s) =
s +a
s +d
Para construir o lugar das razes devemos usar a fun c ao de transferencia de malha aberta. Nesta
fun c ao, dada por G(s)H(s), o p olo em a cancela com o zero em a. No entanto, se calcularmos a
70 Captulo 4: Propriedades Basicas de Sistemas Realimentados
fun c ao de transferencia de malha fechada, temos
Y (s)
R(s)
=
k(s +c)(s +d)
[(s +b)(s +d) +k(s +c)](s +a)
Ou seja, o p olo a cancelado aparece na fun c ao de transferencia de malha fechada. Este p olo n ao
aparece no lugar das razes e e um p olo xo, ou seja, permanece na mesma localiza c ao qualquer que seja
o valor do par ametro vari avel, e portanto nenhum ramo parte deste p olo.
Consideremos agora a congura c ao mostrada na Figura 4.21. com as mesmas fun c oes de transferencia
G(s) H(s)
R(s) Y (s) +
Figura 4.21: Cancelamento de p olo-zero
G(s) e H(s).
Na fun c ao de transferencia de malha aberta, usada para construir o LR, o p olo em a e cancelado.
Quando determinamos a fun c ao de transferencia de malha fechada obtemos
s +c
(s +b)(s +d) +s +c
e portanto o p olo em s = a n ao e mais um p olo de malha fechada. Conclumos que quando o cancela-
mento e na malha direta, o p olo e realmente cancelado na fun c ao de transferencia de malha fechada.
4.5.4.5 Lugar das razes para um par ametro diferente do ganho
Algumas vezes o par ametro vari avel no sistema n ao e o ganho, e neste caso o lugar das razes n ao pode
ser construdo diretamente. O exemplo a seguir ilustra o procedimento usado.
Seja a fun c ao de transferencia
G(s) =
1
s(s +c)
(4.5.21)
Deseja-se tra car o lugar das razes para o par ametro c. A equa c ao caracterstica do sistema e
1 +
1
s(s +c)
= 0 ou s
2
+cs + 1 = 0 (4.5.22)
Dividindo-se por s
2
+ 1 tem-se
1 +c
s
s
2
+ 1
(4.5.23)
Observe que esta equa c ao e a equa c ao caracterstica do sistema da Figura 4.22
c
s
s
2
+ 1
R(s) Y (s) +
Figura 4.22: Sistema equivalente com c como ganho
Pode-se ent ao tra car o lugar das razes para o sistema com fun c ao de transferencia de malha aberta
s
s
2
+ 1
(4.5.24)
EEL-DAS-UFSC 71
4.5.4.6 Efeito de p olos-zeros no L.R.
Uma quest ao que pode facilmente ser analisada pelo lugar das razes e o efeito da adi c ao de p olos e zeros
a um sistema.
Adi c ao de p olos Para ilustrar este efeito, seja o sistema com fun c ao de transferencia de malha aberta
dada por
G(s)H(s) =
K
s(s + 1)
, com a > 0 (4.5.25)
O lugar das razes deste sistema e dada apresentado na Figura 4.24(a).
1.3 1.1 0.9 0.7 0.5 0.3 0.1 0.1 0.3
30
20
10
0
10
20
30
40
50
(a) Sistema original
17 13 9 5 1 3 7
13
9
5
1
3
7
11
15
(b) Adi c ao de p olo em 3
11 9 7 5 3 1 1 3 5 7
9
7
5
3
1
1
3
5
7
9
Evans root locus
Real axis
Imag. axis
(c) Adi c ao de mais um p olo em 4
9 7 5 3 1 1 3 5 7
8
6
4
2
0
2
4
6
8
(d) Adi c ao de p olos complexos em 2 j2
Figura 4.23: Efeito da adi c ao de p olos
Consideremos inicialmente a adi c ao de um p olo em s = 3. A fun c ao de transferencia de malha
aberta e ent ao
G(s)H(s) =
K
s(s +a)(s +b)
(4.5.26)
o lugar das razes e agora apresentado na Figura 4.23(b)
72 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Consideremos a adi c ao de mais um p olo em 4, ou seja, s fun c ao de transferencia de malha aberta e
G(s)H(s) =
K
s(s + 1)(s + 3)(s + 4)
(4.5.27)
O lugar das razes correspondente e mostrado na Figura 4.23(c)
Para o caso onde um par de p olos complexos em 2 j2 for adicionado ao sistema original, tem-se
o lugar das razes da Figura 4.23(d).
Atraves destes exemplos pode-se concluir que a adi c ao de p olos ` a fun c ao de transferencia G(s)H(s)
desloca o lugar das razes para o lado direito do plano complexo, o que tem efeito desestabilizante no
sistema. Note que os p olos tendem a reduzir o valor do angulo das assntotas, o que entorta os ramos
para o lado direito.
Adi c ao de zeros Consideremos o sistema original, dado por 4.5.25. Um zero e adicionado em b. O
LR do sistema e mostrado na Figura 4.24(b).
1.3 1.1 0.9 0.7 0.5 0.3 0.1 0.1 0.3
30
20
10
0
10
20
30
40
50
(a) Sistema original
7 6 5 4 3 2 1 0 1
3
2
1
0
1
2
3
(b) Adi c ao de zero em 3
3.0 2.6 2.2 1.8 1.4 1.0 0.6 0.2 0.2 0.6 1.0
3
2
1
0
1
2
3
(c) Adi c ao de zeros complexos 2 j2
3.7 3.3 2.9 2.5 2.1 1.7 1.3 0.9 0.5 0.1 0.3
40
30
20
10
0
10
20
30
40
50
60
(d) Adi c ao de p olo em 3 e de zero em 3.5
Figura 4.24: Efeito da adi c ao de zeros
Se um par de zeros complexos for adicionado, ent ao o lugar das razes e dado na Figura 4.24(c)
Seja agora o sistema 4.5.26, com mais um zero real adicionado. O lugar das razes e mostrado na
Figura ??.
EEL-DAS-UFSC 73
Observe que as assntotas que tinham inclina c ao 60
, passam a ter inclina c ao 90
.
Dos exemplos estudados, observamos que a adi c ao de zeros desloca o lugar das razes para a esquerda
e tem, portanto, um efeito estabilizante no sistema.
4.5.5 Estabilidade no domnio da freq uencia
Toda a an alise de estabilidade desenvolvida ate aqui foi baseada no estudo das razes da equa c ao ca-
racterstica do sistema. No entanto, a estabilidade tambem pode ser estudada a partir da resposta em
freq uencia do sistema, como dada, por exemplo, pelo diagrama de Bode e pelo diagrama polar do sistema.
A condi c ao de estabilidade e dada pela equa c ao caracterstica
1 +KG = 0
, ou
_
|K G(s)| = 1
G(s) = 180
Supondo que o lugar das razes seja o mostrado na Figura, onde o cruzamento do eixo imagin ario ocorre
para K = K
c
, com = omega
C
, a condi c ao no limiar da instabilidade (p olos sobre o eixo imagin ario
j), corresponde ` a
_
|K
c
G(j
c
)| = 1
G(j
c
) = 180
Do exemplo acima conclumos que o sistema e est avel desde que |K G(j)| < 1 na freq uencia onde
G(j) = 180
. Esta conclus ao n ao e generica pois existem sistemas est aveis que n ao satisfazem essa
condi c ao. Para resolver essa diculdade devemos utilizar o criterio de estabilidade de Nyquist.
4.5.5.1 Criterio de Nyquist
O criterio de estabilidade de Nyquist relaciona a fun c ao G(j) com o n umero de p olos de M.F. no semi
plano direito (SPD) e est a baseado no resultado conhecido como Princpio do argumento.
O Princpio do argumento tem uma deriva c ao rigorosa na teoria de fun c oes de vari aveis complexas,
mas a abordagem usada a seguir apenas exp oe a base deste princpio.
Consideremos uma fun c ao de transferencia G
1
(s), com a congura c ao de p olos e zeros no plano
complexo, mostrada na Figura 4.25. Consideremos ainda um contorno fechado no plano complexo,
denotado C
1
, na mesma gura. Vamos determinar a varia c ao angular de G
1
(s) quando s varia sobre o
Re(s)
z1
z2
Im(s)
C
1
s
0
p2
p1
Figura 4.25: Contorno C
1
indicando varia c ao de s
contorno C
1
, realizando uma volta completa no sentido hor ario. Este c alculo n ao e difcil se lembrarmos da
interpreta c ao vetorial de n umeros complexos. Ou seja, estaremos acompanhando a varia c ao dos angulos
74 Captulo 4: Propriedades Basicas de Sistemas Realimentados
dos vetores que come cam em cada zero e cada p olo de G
1
(s), e terminam em s. Isto est a representado
na Figura 4.25. Para o ponto s
0
sobre o contorno, tem-se que,
G
1
(s
0
) = =
z
1
+
z
2
(
p
1
+
p
2
)
O gr aco de G
s
e mostrado na Figura 4.26
ImG
1
(s)
ReG
1
(s)
Figura 4.26: Gr aco de G
1
(s) quando s varia sobre o contorno C
1
Observa-se que este gr aco n ao envolve a origem. O envolvimento da origem signicaria uma varia c ao
angular de 360
da fun c ao de transferencia. Ou seja, o vetor que representa G
1
(s
0
), parte da origem e
termina em G
1
(s
0
), com angulo . Este vetor n ao completa nenhuma volta em torno da origem.
Seja agora G
2
(s), com p olos e zeros conforme mostrado na Figura 4.27.
Re(s)
z1
z2
Im(s)
C
1
s
0
p2
p1
Figura 4.27: Contorno C
2
indicando varia c ao de s
Devido ao p olo no interior do contorno C
2
, o angulo de G
2
sofre uma varia c ao de 360
ap os s
0
fazer
uma volta sobre C
1
. Ent ao o angulo de G
2
tambem sofre uma volta de 360
(no sentido anti-hor ario, por
ser um p olo em C
2
), como mostrado na Figura 4.28. Logo G
2
envolve a origem no sentido anti-hor ario.
Com estes resultados, podemos enunciar o princpio do argumento.
Princpios do argumento: o mapa de contorno de uma fun c ao complexa envolve a origem se o
contorno contem uma singularidade (p olo ou zero) da fun c ao.
Generaliza c ao: m ultiplas singularidades podem estar no contorno. O n umero e o sentido dos
envolvimentos da origem ent ao mudam. Por exemplo, se o n umero de p olos e zeros dentro de C
1
e o
mesmo, ent ao n ao haver a envolvimento da origem.
Este resultado pode ser aplicado ao problema de estabilidade. Suponha que C
1
e o contorno que
envolve todo o semiplano direito (SPD), como mostrado na Figura 4.29 Ent ao G(s) envolve a origem
EEL-DAS-UFSC 75
z
1
z
2
p
1
p
2
Im(s)
Re(s)
s
0
Figura 4.28: Gr aco de G
2
(s) quando s varia sobre o contorno C
2
C
1
Im(s)
Re(s)
Figura 4.29: Contorno C
1
envolvendo todo o lado direito do plano complexo
somente se tiver um p olo ou zero no lado direito.
O objetivo agora e usar os resultados anteriores para determinar a estabilidade de um sistema de
controle em malha fechada.
Considere o sistema com fun c ao de transferencia de malha fechada:
Y (s)
R(s)
= T(s) =
KG(s)
1 +K G(s)
(4.5.28)
com razes de malha fechada dadas por 1 +K G(s) = 0.
Devemos denir o contorno e a fun c ao cujo mapeamento envolve ou n ao a origem, quando a vari avel
s percorre o contorno. Escolheremos o contorno C
1
que envolve todo o semi-plano direito. A fun c ao a
ser mapeada ser a 1 +KG(s).
Se o contorno que envolve o SPD contem um zero ou p olo de 1+K G(s) ent ao 1+K G(s) vai envolver
a origem. Note que 1 + K G(s) e KG(s) deslocado ` a direita de uma unidade. Portanto se o gr aco de
1 +K G(s) envolve a origem, o gr aco de KG(s) vai envolver o ponto -1 do eixo real.
76 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Desta forma 1 e o ponto crtico e o c alculo de KG(s) e o diagrama polar ou de Nyquist (magnitude
e angulo de KG(jw)).
Para se determinar se um envolvimento e devido a um p olo ou zero, pode-se escrever.
1 +KG(s) = 1 +K
b(s)
a(s)
=
a(s) +Kb(s)
a(s)
Os p olos de 1 + KG(s) s ao os p olos de G(s), e em geral, sabe-se se existem p olos de malha fechada no
SPD.
Se n ao existirem p olos de G(s) no SPD, o envolvimento do ponto 1 por KG(s) indica que um zero
de 1 +KG(s) est a no SPD e e portanto um p olo do sistema em malha fechada.
Generaliza c ao: um contorno C
1
no sentido hor ario envolvendo um zero de 1 +KG(s), ou seja, um
p olo inst avel de MF, resulta em KG(s) envolvendo o ponto 1 no sentido hor ario. Se C
1
envolve um p olo
de 1 + KG(s), ou seja, um p olo inst avel de MA, haver a um envolvimento de 1 por KG(s) no sentido
anti-hor ario.
O n umero lquido de envolvimentos, N e igual ao n umero de zeros (p olos de malha fechada) no SPD,
Z, menos o n umero de p olos de malha aberta no SPD, P. Chega-se ent ao ` a rela c ao:
N = Z P (4.5.29)
que relaciona p olos de malha fechada, de malha aberta e n umero de envolvimentos do ponto 1.
O procedimento para aplicar o criterio de Nyquist resume-se nos seguintes passos:
Diagrama polar da FTMA Tra ca-se o diagrama polar de KG(jw). Devido ` a simetria plota-se apenas
para w 0 a . Desde que n < m (n umero de zeros menor do que o n umero de p olos), a parte de
C
1
correspondente ` a s e mapeada pr oxima ` a origem. Ou seja, deve-se mapear K G(s) para
s j a j, ou de 0 a +j e ent ao reetindo-se com rela c ao ao eixo real.
N umero de p olos de malha aberta O n umero de p olos de malha aberta inst aveis e conhecido da
fun c ao de transferencia de malha aberta. Portanto P e conhecido.
N umero de envolvimentos de -1 Determine o n umero de envolvimento do ponto 1. Isto pode ser
feito tra cando um vetor que come ca em 1 e termina sobre o diagrama polar. O ponto nal do vetor
deve se deslocar desde o ponto do diagrama correspondente a = ate o ponto correspondente
a = +. Verique quantas voltas completas em torno de 1 foram completadas pelo vetor no
sentido hor ario (positivo) e anti-hor ario (negativo). Alternativamente, trace uma reta partindo de
-1, em qualquer dire c ao, e veja quantas vezes o gr aco cruza esta reta da esquerda para a direita
(positivo) ou da direita para a esquerda (negativo). A soma algebrica destes valores e o n umero N
de envolvimentos.
N umero de p olos de malha fechada Aplica-se a rela c ao N = Z P, determinando-se Z.
Em geral, o sistema de malha aberta e est avel e portanto P = 0. Neste caso, o sistema de malha
fechada e est avel se N = 0 ou seja, se n ao existir envolvimento do ponto 1.
Exemplo 4.5.10 Considere o sistema de segunda ordem da Figura 4.30. Determine a estabilidade do
K
1
(s + 2)
2
R(s) Y (s) +
Figura 4.30: Exemplo do criterio de Nyquist
sistema para K = 1.
EEL-DAS-UFSC 77
0.3 0.1 0.1 0.3 0.5 0.7 0.9 1.1 1.3
0.7
0.5
0.3
0.1
0.1
0.3
0.5
0.7
0.3 0.1 0.1 0.3 0.5 0.7 0.9 1.1 1.3
0.7
0.5
0.3
0.1
0.1
0.3
0.5
0.7
100
0.162
0.076
0.047
0.021
0.002
0.025
0.051
0.080
0.119
0.178
Nyquist plot
Re(h(2i*pi*f))
Im(h(2i*pi*f))
Figura 4.31: Diagrama polar
A fun c ao de transferencia de malha aberta n ao tem nenhum p olo inst avel. Logo P = 0. O diagrama
polar e apresentado na Figura 4.33.
Contando o n umero de envolvimentos do ponto 1 tem-se N = 0. Logo, Z = 0, P = 0:Z = 0. Logo
o sistema e est avel.
4.5.5.2 Criterio de Nyquist para uma faixa de ganho
Para aplicar o criterio de Nyquist, deve-se tra car o diagrama polar, o que requer que o ganho seja
conhecido a priori. No entanto, ` as vezes deseja-se determinar a faixa de ganhos para a qual o sistema e
inst avel, sem xar inicialmente o ganho. Nestes casos testa-se o envolvimento de
1
K
por G(s). Observa-
se que isto e equivalente a testar o envolvimento de 1 por KG(s).
Exemplo 4.5.11 Para o exemplo anterior deseja-se determinar a faixa de ganho para o qual o sistema
e est avel.
Deve-se ter:
1
K
< 0 ou
1
K
> 1 (para K > 0), logo K > 1 para o sistema ser est avel.
4.5.5.3 Fun c ao de malha aberta com p olo na origem
No caso onde a fun c ao de transferencia de malha aberta tem p olos na origem, o contorno deve ser
modicado, como mostrado na Figura. Deve-se ent ao mapear o semi-crculo em torno do p olo na origem,
dado por e
, com variando de
2
a
2
. Este mapeamento e determinado pelo p olo (ou p olos) na
origem da fun c ao de transferencia de malha aberta.
E f acil de ver, para o caso de um p olo da fun c ao
de transferencia de malha aberta na origem, que o p olo determina o mapeamento, ou seja, supondo a
fun c ao de transferencia G(s) =
1
s
G
, o mapeamento do semi-crculo e dado por G(e
) =
1
e
(e
),
este mapeamento corresponde a
1
, e portanto o semi-crculo em torno da origem e mapeado em um
semi-crculo de raio innito que vai de
pi
2
a
pi
2
, ou seja, um semi-crculo no sentido hor ario. Para um
n umero qualquer p de p olos na origem, tem-se p semi-crculos de raio innito no sentido hor ario.
Exemplo 4.5.12 Fun c ao de transferencia de malha aberta com zero na origem Considere o
sistema dado na Figura 4.32. O objetivo e determinar o n umero de p olos de malha fechada no lado direito
do plano complexo.
O diagrama polar para esta fun c ao, considerando K = 1, e mostrado na Figura 4.33
78 Captulo 4: Propriedades Basicas de Sistemas Realimentados
K
1
s(s + 2)
2
R(s) Y (s) +
Figura 4.32: Fun c ao de transferencia de malha aberta com p olo na origem
2.0 1.6 1.2 0.8 0.4 0 0.4 0.8 1.2
3
2
1
0
1
2
3
1000 0.35
0.24
0.17
0.12
0.1
0.14
Figura 4.33: Diagrama polar para o caso de um p olo na origem
Como existe um p olo na origem, temos um semi-crculo de raio innito no sentido hor ario, de = 0
a
0+
. Podemos agora aplicar o criterio de Nyquist. Vamos considerar o ganho vari avel, portanto
determinaremos o envolvimento do ponto
1
K
. Para 0, 5 <
1
K
< 0:N = 2, P = 0 e Z = 2, ou seja,
sistema inst avel.
Se
1
K
< 0 (no eixo real positivo), ent ao N = 1, P = 0 e Z = 1. Este e o caso de K < 0. Se K for
pequeno, ent ao
1
K
n ao e envolvido e N = 0, P = 0:2 = 0, o que resulta em sistema est avel.
Exemplo 4.5.13 Sistema inst avel em malha aberta. Considere o sistema da Figura unstol.
K
s + 1
s(0.1s 1)
R(s) Y (s) +
Figura 4.34: Sistema inst avel em malha aberta
O diagrama polar deste sistema, para K = 1, e apresentado na Figura 4.35. Como existe um p olo na
origem, temos que completar o diagrama polar com um semi-crculo no sentido hor ario, indo de = 0
a 0
+
.
Podemos estudar a estabilidade do sistema, para a varia c ao de K, usando o criterio de Nyquist.
Para K > 1, tem-se N = 1, P = 1 e portanto N = 0.
Para K < 1, tem-se N = +1, P = 1 e Z = 2. Portanto o sistema e inst avel. Observe que no caso de
um p olo de malha aberta inst avel, e preciso existir envolvimento para o sistema poder ser est avel.
4.5.5.4 Margens de Estabilidade
Muitas vezes e desej avel conhecer n ao somente se um sistema e est avel, mas qual a dist ancia da instabili-
dade, o que permite determinar qual o valor que um par ametro pode variar para se atingir a condi c ao de
EEL-DAS-UFSC 79
1.5 1.3 1.1 0.9 0.7 0.5 0.3 0.1 0.1 0.3
1.7
1.3
0.9
0.5
0.1
0.3
0.7
1.1
1.5
1.9
1000
1.75
1.03
0.47
0.18
0.1
0.1
0.18
1.71
Figura 4.35: Diagrama polar para sistema inst avel em malha aberta
instabilidade. No caso do criterio de Nyquist, a dist ancia do diagrama polar ao ponto 1 e uma medida
da margem de estabilidade. Ao inves de medir diretamente este valor, as deni c oes de margem de ganho
e margem de fase fornecem uma indica c ao daquela dist ancia, sendo uteis tanto para a an alise quanto
para o projeto de sistemas de controle. Estas margens podem ser medidas tanto no diagrama de Nyquist
quanto no diagrama de Bode.
Considerando o diagrama de Nyquist da Figura 4.36 observa-se que se a fun c ao de transferencia for
multiplicada por MG, o diagrama passa exatamente em cima do ponto 1. Por outro lado, se o diagrama
for girado no sentido hor ario por um angulo MF, novamente o diagrama passa pelo ponto 1. Nos dois
casos o sistema atinge o limiar da instabilidade. Isto leva ` as seguintes deni c oes de margem de ganho e
margem de fase.
Deni c ao 10 Margem de ganho (MG) Fator pelo qual o ganho deve ser multiplicado para se obter
o ganho crtico.
Se o ganho do sistema for K e K
c
e o ganho crtico correspondente ao limiar da instabilidade, ent ao
K
c
= K MG (4.5.30)
Se o ganho for em dB, ent ao a margem de ganho e o valor que somado ao ganho atual leva o sistema
ao limiar da instabilidade
K
c
|
dB
= K|
dB
+ MG|
dB
(4.5.31)
A margem de ganho pode ser determinada do Diagrama de Bode, do diagrama polar ou ainda L.R.
Deni c ao 11 Margem de fase (MF) valor correspondente a quanto G(j) excede 180
As margens de ganho e fase, usando o diagrama de Nyquist, s ao mostradas na Figura 4.36.
As margens de ganho e fase podem ser determinadas facilmente do DB, como mostrado na Figura ??.
Observe a correspondencia entre estas margens como determinadas pelos dois diagramas.
4.5.5.5 Rela c ao entre MF e amortecimento
A margem de fase fornece uma indica c ao do amortecimento de um sistema em malha fechada. Embora a
rela c ao seja derivada para um sistema de segunda ordem, pode-se generalizar este resultado para sistemas
de ordem mais elevada, que tenham um par de p olos dominantes.
Seja o sistema dado na Figura 4.38.
80 Captulo 4: Propriedades Basicas de Sistemas Realimentados
1
1
MG
MF
Im[KG(j)
Re[KG(j)
Figura 4.36: Margens de ganho e de fase
1
.
1
.
Magnitude
Fase
0
dB
Graus
(rad/seg)
(rad/seg)
180
(a) Ganho K = Kcrit
.
.
dB
Magnitude
Fase
Graus
0
MF()
(rad/seg)
(rad/seg)
MG()
180
(b) Ganho K > Kcrit
.
.
MG(+)
Magnitude
Fase
dB
Graus
(rad/seg)
(rad/seg)
MF()
180
(c) Ganho K < Kcrit
Figura 4.37: Margem de ganho e fase a partir do Diagrama de Bode
EEL-DAS-UFSC 81
n
2
s(s + 2
n
)
R(s) Y (s) +
Figura 4.38: Rela c ao entre amortecimento e margem de fase
A fun c ao de transferencia de malha fechada e
T(s) =
2
n
s
2
+ 2s +
n
2
(4.5.32)
com amortecimento .
Vamos calcular a margem de fase deste sistema.Para isto usamos a fun c ao de transferencia de malha
aberta. O seguintes passos nos fornecem aquela margem.
Freq uencia de cruzamento A passagem por 0 dB e dada por
n
2
(
c
)(j
c
+ 2
n
)
= 1 (4.5.33)
Com isto obtemos a freq uencia de cruzamento
c
.
C alculo da margem de fase A margem de fase e dada por MF = 180 +
n
2
(j
c
)(j
c
+ 2
n
)
. Com o
valor calculado na equa c ao anterior tem-se
PM = tg
1
2
_
_
1 + 4
4
2
2
(4.5.34)
O gr aco relacionando margem de fase e amortecimento e dado na Figura 4.5.5.5.
0 10 20 30 40 50 60 70 80
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
MF(deg)
82 Captulo 4: Propriedades Basicas de Sistemas Realimentados
Observa-se que e possvel tra car uma aproxima c ao para esta curva atraves de uma reta passando pelo
par (10
, 0.2) e (60
). Com isto, tem-se uma rela c ao importante entre margem de fase e amortecimento
MF
100
ou
= 0, 01MF
Limita c oes do uso da margem de ganho e fase O uso das margens de ganho e fase e limitado em
alguns sistemas. Para sistemas de primeira e segunda ordem, o diagrama de fase nunca cruza 180
,
e portanto n ao se pode determinar uma margem de fase. O ganho pode ser aumentado sem limite e o
sistema ainda ser a est avel, ou seja, a margem de ganho e innita. Em alguns sistemas pode-se ter v arias
passagens por 0 dB ou por 180
, sendo as margens de ganho e fase denidas de maneira n ao unica.
Em outros sistemas ainda, pode-se ter conito entre a MG e a MF, com, por exemplo, uma MG negativa
e uma MF positiva. Neste caso, o criterio de Nyquist pode ser aplicado para dirimir qualquer d uvida e
determinar a estabilidade do sistema.
A seguir s ao apresentados exemplos que ilustram alguns destes caso.
Exemplo 4.5.14 Propriedades de estabilidade de um sistema condicionalmente est avel. Con-
sidere o sistema com fun c ao de transferencia de malha aberta dada por G(S) =
K(s + 10)
2
s
3
.
O diagrama polar e mostrado na Figura para K = 7. Observe que devido ` a presen ca de 3 p olos de
malha aberta na origem, tem-se 3 semi-crculos no sentido hor ario, indo de 0
a 0
+
, com raio innito.
Observa-se que a MF e positiva, mas a MG e menor que 1, e portanto negativa em dB. Usando-se o
criterio de Nyquist, tem-se N = Z P, com N = 0, P = 0 e portanto Z = 0
Exemplo 4.5.15 Sistema com m ultiplas frequencias de cruzamento. Considere o sistema com
fun c ao de transferencia de malha aberta dada por G(s) =
85(s + 1)(s
2
+ 2s + 43.25)
s
2
(s
2
+ 2s + 82)(s
2
+ 2s + 101)
O diagrama polar deste sistema e apresentado em aula. Observa-se que o sistema apresenta 3 pontos
de cruzamento com o crculo unit ario, e portanto tem freq uencias de cruzamento correspondentes ao
ganho. Com isto pode-se denir 3 margens de fase, A escolha e pela proximidade do ponto -1. A menor
varia c ao de fase para chegar a este ponto determina a escolha. Portanto a MF escolhida e 37
.
EEL-DAS-UFSC 83
Exerccios
1. Considere o sistema abaixo:
1 + 3s
s
2
s(1 + 4s)
R(s) Y (s) +
Figura 4.39: Figura para o Exerccio 1
Pede-se o erro em regime permanente e
r
p para as entradas a seguir:
a)R(t) = 3 + 4t
b)R(t) = 5 + 6t + 4t
2
c)R(t) = 1 + 2t +t
2
+ 3t
2
+ 3t
3
2. Para o sistema abaixo, determine o mnimo valor do ganho K de modo que:
a. Quando C(s)=1, o erro est atico ao degrau deve ser no m aximo de 1%;
b. Quando C(s) =
3
s
, o erro est atico a R(t) = 6t + 5 deve ser no m aximo igual a 0.01.
C(s)
60 K
(s + 3)(s
3
+ 14s
2
+ 5s + 4)
R(s) Y (s) +
Figura 4.40: Figura para o Exerccio 2
3. Considere o sistema de controle em malha fechada abaixo. Os par ametros do modelo s ao os
seguintes: = 4 = 9; = 3; K1 = 4; K2 = 2. Determine o erro est atico ` a entrada r(t) = 5+2t+0, 2t
2
K
1
1
1 +s
s +
s
3
+s
R(s) Y (s) +
Figura 4.41: Figura para o Exerccio 3
4. Determine o erro est atico do sistema abaixo ` a entrada: R(t) = 2t
2
9t + 17
s + 1
s
3
(s + 2)
s
2
s(s + 6)
s
2
+s + 1
s(s + 2)
9
s
2
R(s) Y (s) +
Figura 4.42: Figura para o Exerccio 4
5. Esbo car o Lugar Geometrico das Razes (0 K ) correspondentes aos sistemas cujas con-
gura c oes de p olos e zeros de malha aberta est ao indicadas na Figura 4.43.
84 Captulo 4: Propriedades Basicas de Sistemas Realimentados
(a)
3
(b)
(c)
(d)
2
(e)
(f)
Figura 4.43: Figura para o Exerccio 5
6. Determine as propriedades geometricas pertinentes e esboce o Lugar Geometrico das razes, com
0 K 00, para os sistemas cujas fun c oes de transferencia em malha aberta est ao dadas abaixo:
a) G(s)H(s) =
K
(s + 1)(s + 5)
b)G(s)H(s) =
K
(s + 2)(s
2
+ 8s + 20)
c)G(s)H(s) =
K(s + 2)
(s + 1)(s
2
+ 6s + 10)
d)G(s)H(s) =
K
(1 + 0, 5s)(1 + 0, 2s)(1 +s)
2
7. Determine a faixa de valores de K para a qual cada um dos sistemas em malha fechada, cujas FTs
em malha aberta s ao dadas no problema anterior, e est avel.
EEL-DAS-UFSC 85
8. Dado o sistema em malha fechada abaixo, determine o lugar geometrico das razes em M.F no
plano -s quando a constante de tempo varia de 0 a .
s
s
3
+ 3s
2
+ 2s + 1
1 +s
R(s) Y (s) +
Figura 4.44: Figura para o Exerccio 8
9. Dadas as fun c oes de transferencia abaixo, calcule a margem de ganho, a margem de fase e estime
o amortecimento .
a) G(s) =
5
(1 + 4s)(1 + 10s)
b) G(s) =
3(1 + 10s)
(1 + 2s)(1 + 5s)
c) G(s) =
(1 + 4s)
s(1 + 3s)(1 + 10s)
d) G(s) =
5
(s + 1)(s + 3)
e) G(s) =
8(1 2s)
(1 + 2s)(1 + 15s)
10. Dadas as fun c oes de transferencia abaixo, determine a estabilidade do sistema em malha fechada,
usando o criterio de Nyquist.
a) G(s) =
4(s + 3)
s(s + 2)(s + 5)
b) G(s) =
15
(s + 1)(s + 5)
c) G(s) =
8(1 + 5s)
(1 + 2s)
d) G(s) =
10(s 4)
(s + 3)(s + 7)
e) G(s) =
(s 3)
(s + 5)(s 1)
Anda mungkin juga menyukai
- Capitulo 1°modelagem de Sistema ContinuoDokumen25 halamanCapitulo 1°modelagem de Sistema ContinuoBenjamin Oh PredilectoBelum ada peringkat
- 2.1 - Transformadas de FourierDokumen30 halaman2.1 - Transformadas de FourierPatrick MenezesBelum ada peringkat
- Laplace Aplicado em Circuitos ElétricosDokumen21 halamanLaplace Aplicado em Circuitos ElétricosMateo MonteroBelum ada peringkat
- Crema, J. - EDODokumen167 halamanCrema, J. - EDOgoblinrusBelum ada peringkat
- 04 Equacoes PoissonDokumen14 halaman04 Equacoes PoissonjuaciBelum ada peringkat
- Apostila CSD CombinadaDokumen128 halamanApostila CSD CombinadaPierri Della BrunaBelum ada peringkat
- 7 - Sistema Primeira OrdemDokumen28 halaman7 - Sistema Primeira Ordembersilveira8645Belum ada peringkat
- 3 - Slides de Métodos Aplicados À Engenharia - Transformada de Laplace e Circuitos ElétricosDokumen28 halaman3 - Slides de Métodos Aplicados À Engenharia - Transformada de Laplace e Circuitos ElétricosMarcelo AugustoBelum ada peringkat
- Av2 - Cálculo Diferencial e Integral IIIDokumen3 halamanAv2 - Cálculo Diferencial e Integral IIIAnderson PortelaBelum ada peringkat
- 4 Linearização e Transformadas de LaplaceDokumen54 halaman4 Linearização e Transformadas de LaplaceAlan ModestoBelum ada peringkat
- Deconvolução: ConteúdoDokumen82 halamanDeconvolução: ConteúdoAna LuizaBelum ada peringkat
- CII - Caderno - Exercicios 2 3 3Dokumen59 halamanCII - Caderno - Exercicios 2 3 3Tiago LuzBelum ada peringkat
- 4 - Lista LaplaceDokumen3 halaman4 - Lista LaplaceIvan FontelesBelum ada peringkat
- Lista de Exercício Cap2 NiseDokumen3 halamanLista de Exercício Cap2 NiseBreno Vinheiros MirandaBelum ada peringkat
- Aula 12 Laplace2Dokumen42 halamanAula 12 Laplace2Gustavo SantanaBelum ada peringkat
- Aula - Nise - Cap2 CONTROLE LINEARDokumen56 halamanAula - Nise - Cap2 CONTROLE LINEARLucas RodriguesBelum ada peringkat
- Apostila de Controle e ServomecanismoDokumen37 halamanApostila de Controle e ServomecanismoMarinaldo RodriguesBelum ada peringkat
- Plano Temático de Análise Matemática IIIDokumen3 halamanPlano Temático de Análise Matemática IIIMomade Antonio RihelaBelum ada peringkat
- Tutorial SAGEDokumen111 halamanTutorial SAGEIgor Patrício MichelsBelum ada peringkat
- Lista Ckts 4ºbiDokumen25 halamanLista Ckts 4ºbiDalton InacioBelum ada peringkat
- Capítulo 4 - Transformaç - o de LaplaceDokumen53 halamanCapítulo 4 - Transformaç - o de LaplaceHernane Da LuzBelum ada peringkat
- 03 Funcao DegrauDokumen19 halaman03 Funcao DegrauThiago DantasBelum ada peringkat
- Lista AnaliseDokumen3 halamanLista AnaliseKaio MenezesBelum ada peringkat
- Aula 02 Diagrama BlocosDokumen31 halamanAula 02 Diagrama BlocosAilton SorlagBelum ada peringkat
- Sistemas Vibratórios: Um Enfoque Da Solução Dinâmica Da Matriz de TransferênciaDokumen139 halamanSistemas Vibratórios: Um Enfoque Da Solução Dinâmica Da Matriz de TransferênciaFilipe MirandaBelum ada peringkat
- Métodos Matemáticos - Aula 06Dokumen168 halamanMétodos Matemáticos - Aula 06vinicius.camattaBelum ada peringkat
- CADERNO DIDÁTICO DE SISTEMAS DE CONTROLE 1 - Prof. Hélio Leães HeyDokumen145 halamanCADERNO DIDÁTICO DE SISTEMAS DE CONTROLE 1 - Prof. Hélio Leães Heyjonastibola100% (1)
- Função Degrau PDFDokumen20 halamanFunção Degrau PDFJorge FSMBelum ada peringkat