Anda mungkin juga menyukai
- Vibration Control and Actuation of Large-Scale SystemsDari EverandVibration Control and Actuation of Large-Scale SystemsHamid Reza KarimiBelum ada peringkat
- 16 Part2.ActiveVibrationControlPiezo FuzzyDokumen45 halaman16 Part2.ActiveVibrationControlPiezo FuzzyJason ChiangBelum ada peringkat
- Active Vibration Control of Ed Cantilever BeamDokumen33 halamanActive Vibration Control of Ed Cantilever BeamCaner GençoğluBelum ada peringkat
- Smart MaterialsDokumen61 halamanSmart MaterialsMadhusudhanan ChelliahBelum ada peringkat
- B.Tech (ECE) 5th SemDokumen12 halamanB.Tech (ECE) 5th Semak182007Belum ada peringkat
- Beltrán Et Al - 2006 - Atomic Force Microscopy Cantilever Simulation by Finite Element Methods For2Dokumen9 halamanBeltrán Et Al - 2006 - Atomic Force Microscopy Cantilever Simulation by Finite Element Methods For2Deepak patelBelum ada peringkat
- B.tech (EE) 5th & 6th SemDokumen23 halamanB.tech (EE) 5th & 6th SemAdan HoodaBelum ada peringkat
- Mdu, B.tech (ECE) 5th and 6th Sem New SyllabusDokumen23 halamanMdu, B.tech (ECE) 5th and 6th Sem New SyllabusAshish Singh50% (2)
- Adaptive Feedforward Cancellation of Sinusoidal Disturbances in Superconducting RF CavitiesDokumen7 halamanAdaptive Feedforward Cancellation of Sinusoidal Disturbances in Superconducting RF CavitiesEsiBelum ada peringkat
- Fea Simulation For Vibration Control of Shaft System by Magnetic Piezoelectric Control MountDokumen4 halamanFea Simulation For Vibration Control of Shaft System by Magnetic Piezoelectric Control MountInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Seminar ReportDokumen16 halamanSeminar ReportHemraj SonarBelum ada peringkat
- Numerical Computation of The Sound Radiation FromDokumen22 halamanNumerical Computation of The Sound Radiation FromNURI ONUR CATAKBelum ada peringkat
- FALLSEM2013 14 CP3001 02 Aug 2013 RM01 Int BioTechFall2013QuantumPhysDokumen57 halamanFALLSEM2013 14 CP3001 02 Aug 2013 RM01 Int BioTechFall2013QuantumPhysRaksha RankaBelum ada peringkat
- Mechanical Vibration TransformerDokumen19 halamanMechanical Vibration TransformerTan Phuong LuongBelum ada peringkat
- Seismic Analysis and Design of Structures Using Response Spectra Time History MotionsDokumen60 halamanSeismic Analysis and Design of Structures Using Response Spectra Time History MotionsGanesh KonarBelum ada peringkat
- Seismic Analysis and Design of Structures Using Response Spectra Time History MotionsDokumen60 halamanSeismic Analysis and Design of Structures Using Response Spectra Time History MotionsDiego Benavides KBelum ada peringkat
- CalTrans 2010Dokumen60 halamanCalTrans 2010Kamal Gm100% (1)
- Seismic Analysis and Design of Structures Using Response Spectra Time History MotionsDokumen60 halamanSeismic Analysis and Design of Structures Using Response Spectra Time History Motionstraisimdo100% (1)
- Development of 765 KV AC Transmission KEPCODokumen4 halamanDevelopment of 765 KV AC Transmission KEPCOGuru MishraBelum ada peringkat
- Peak Force Tapping ModeDokumen17 halamanPeak Force Tapping ModeAshok Kumar BakshiBelum ada peringkat
- Mayer-2016-Fatigue & Fracture of Engineering Materials & StructuresDokumen27 halamanMayer-2016-Fatigue & Fracture of Engineering Materials & StructuresmohamadBelum ada peringkat
- SYLLABOUSDokumen17 halamanSYLLABOUSKyle WallsBelum ada peringkat
- Analog Ic SyllabusDokumen4 halamanAnalog Ic SyllabusAhmed KamalBelum ada peringkat
- 1402.4753 Non Linear 88Dokumen25 halaman1402.4753 Non Linear 88Mohamed HachemiBelum ada peringkat
- CD Paper Pag 307Dokumen10 halamanCD Paper Pag 307Anonymous lEBdswQXmxBelum ada peringkat
- HARM - en ProgramDokumen3 halamanHARM - en ProgramSergio ValentinBelum ada peringkat
- Electromagnetic Testing-EMT-ACFM Chapter 10b-LibreDokumen237 halamanElectromagnetic Testing-EMT-ACFM Chapter 10b-Libresafeer ahmadBelum ada peringkat
- Journalnx PZTDokumen3 halamanJournalnx PZTJournalNX - a Multidisciplinary Peer Reviewed JournalBelum ada peringkat
- Vacuum Electronics Research at The University of MichiganDokumen14 halamanVacuum Electronics Research at The University of MichiganBeverly PamanBelum ada peringkat
- Lecture 20 On-Wafer SensorsDokumen62 halamanLecture 20 On-Wafer Sensorsmarija__3Belum ada peringkat
- Integrity Test of PileDokumen5 halamanIntegrity Test of PileDae Yeol KimBelum ada peringkat
- B.tech MDU Syllabus (ECE) 3yrDokumen22 halamanB.tech MDU Syllabus (ECE) 3yrbtechkarloBelum ada peringkat
- The 3 Mev H Test Stand at Cern - The First Part of The SPLDokumen24 halamanThe 3 Mev H Test Stand at Cern - The First Part of The SPLBeverly PamanBelum ada peringkat
- EINA No11p34-36 PDFDokumen3 halamanEINA No11p34-36 PDFSnehaSinghBelum ada peringkat
- Be Instrumentation and ControlDokumen26 halamanBe Instrumentation and ControlmasbmasbBelum ada peringkat
- Finite Element Numerical Simulation Analysis BasedDokumen8 halamanFinite Element Numerical Simulation Analysis BasedBenjoy JohnBelum ada peringkat
- Experimental and Numerical Analysis of A Transducer For The Generation of Guided WavesDokumen9 halamanExperimental and Numerical Analysis of A Transducer For The Generation of Guided Wavesdavood abbasiBelum ada peringkat
- B. Tech. Mechanical Engineering Scheme PDFDokumen87 halamanB. Tech. Mechanical Engineering Scheme PDFshubham.aggarwalBelum ada peringkat
- 07 TT 05 Seismic ABB PDFDokumen3 halaman07 TT 05 Seismic ABB PDFAhsanBelum ada peringkat
- Basics of Scanning Probe Microscopy: A.K. RaychaudhuriDokumen72 halamanBasics of Scanning Probe Microscopy: A.K. RaychaudhuriMallikarjunachari GangapuramBelum ada peringkat
- First-Stage AvDokumen19 halamanFirst-Stage AvAbdullah A. JabberBelum ada peringkat
- Recent Improvements in K-Factor ModelsDokumen19 halamanRecent Improvements in K-Factor ModelsDante FilhoBelum ada peringkat
- Bolt Design ReferenceDokumen11 halamanBolt Design ReferenceOliver SulibitBelum ada peringkat
- Application of An Analysis Technique To Characterise Impulse Response of Grounding SystemsDokumen6 halamanApplication of An Analysis Technique To Characterise Impulse Response of Grounding SystemsLaila JanBelum ada peringkat
- 10A7BDE500FF4295B7ABC9F036FC8968.xlsDokumen220 halaman10A7BDE500FF4295B7ABC9F036FC8968.xlsJakaBelum ada peringkat
- ICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaDokumen6 halamanICME09-AM-17: Anirban Mitra, Prasanta Sahoo and Kashinath SahaFGHUIJBelum ada peringkat
- ME3112-1 Lab Vibration MeasurementDokumen8 halamanME3112-1 Lab Vibration MeasurementLinShaodunBelum ada peringkat
- Nuclear Magnetic Resonance ImagingDokumen17 halamanNuclear Magnetic Resonance ImagingSanjaya Kumar BhoiBelum ada peringkat
- Research Progresses On Cherenkov and Transit-Time High-Power Microwave Sources at NUDTDokumen16 halamanResearch Progresses On Cherenkov and Transit-Time High-Power Microwave Sources at NUDTnanimedichaBelum ada peringkat
- 2002 Power Reactor Noise Studies and ApplicationsDokumen148 halaman2002 Power Reactor Noise Studies and ApplicationsMukhsin A SetiawanBelum ada peringkat
- Development of Non-Conventional Instrument Transformers (NCIT) Using Smart MaterialsDokumen7 halamanDevelopment of Non-Conventional Instrument Transformers (NCIT) Using Smart Materialsjuanandrea2014Belum ada peringkat
- DCCTDokumen84 halamanDCCTEduardo VeronezBelum ada peringkat
- Fishing With MultiphysicsDokumen3 halamanFishing With MultiphysicsRaj KumarBelum ada peringkat
- Measurement Vibrations and Radiated Acoustic Noise of Electrical MachinesDokumen6 halamanMeasurement Vibrations and Radiated Acoustic Noise of Electrical Machinesnar1019Belum ada peringkat
- BTP Presentation - Sem 8Dokumen24 halamanBTP Presentation - Sem 8Nihal MohammedBelum ada peringkat
- BTP Presentation - Sem 8Dokumen24 halamanBTP Presentation - Sem 8Nihal MohammedBelum ada peringkat
- Structural Health Monitoring and Diagnostic Technology: Maria Q. FengDokumen16 halamanStructural Health Monitoring and Diagnostic Technology: Maria Q. FengsekkeiBelum ada peringkat
- ★★Electron RF Linacs for Industrial Applications - ICABU11 - 17 - 포스텍Dokumen34 halaman★★Electron RF Linacs for Industrial Applications - ICABU11 - 17 - 포스텍KoseokhoBelum ada peringkat
- Mechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationDari EverandMechanical Characterization of Materials and Wave Dispersion: Instrumentation and Experiment InterpretationYvon ChevalierBelum ada peringkat
- Lecture 7 Problem Solving: AME 455 Control Systems DesignDokumen12 halamanLecture 7 Problem Solving: AME 455 Control Systems DesignJason ChiangBelum ada peringkat
- Lecture 4 First Order Systems: AME 455 Control Systems DesignDokumen22 halamanLecture 4 First Order Systems: AME 455 Control Systems DesignJason ChiangBelum ada peringkat
- Lecture 8 Disturbance Rejection: AME 455 Control Systems DesignDokumen15 halamanLecture 8 Disturbance Rejection: AME 455 Control Systems DesignJason ChiangBelum ada peringkat
- ME 535 - Vibrations Transient Vibration: F FTDTDokumen3 halamanME 535 - Vibrations Transient Vibration: F FTDTJason ChiangBelum ada peringkat
- Lecture 6 Time Domain Response of Second Order Systems: AME 455 Control Systems DesignDokumen14 halamanLecture 6 Time Domain Response of Second Order Systems: AME 455 Control Systems DesignJason ChiangBelum ada peringkat
- Lecture 5 Poles and Zeros. Dominant Poles. Second Order System ResponseDokumen14 halamanLecture 5 Poles and Zeros. Dominant Poles. Second Order System ResponseJason ChiangBelum ada peringkat
- Lecture 2 Modeling of Physical Systems: AME 455 Control Systems DesignDokumen17 halamanLecture 2 Modeling of Physical Systems: AME 455 Control Systems DesignJason ChiangBelum ada peringkat
- Lecture 1 Introduction To Dynamical Systems and Control AME 455 Control System DesignDokumen12 halamanLecture 1 Introduction To Dynamical Systems and Control AME 455 Control System DesignJason ChiangBelum ada peringkat
- AME 455 Control Systems DesignDokumen12 halamanAME 455 Control Systems DesignJason ChiangBelum ada peringkat
- Tekla - Precast ConcreteDokumen6 halamanTekla - Precast ConcreteJason ChiangBelum ada peringkat
- Problems and SolutionsDokumen13 halamanProblems and SolutionsJason ChiangBelum ada peringkat
- Lyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Dokumen21 halamanLyapunov Stability Theorems: Definition 1 (Positive Definite Functions)Jason ChiangBelum ada peringkat
- Feedback Linearization Continued: Consider The Control Affine SISO SystemDokumen23 halamanFeedback Linearization Continued: Consider The Control Affine SISO SystemJason ChiangBelum ada peringkat
- Feedback Linearisation: N N N N N NDokumen22 halamanFeedback Linearisation: N N N N N NJason ChiangBelum ada peringkat
- 9 NNC Part3Dokumen25 halaman9 NNC Part3Jason ChiangBelum ada peringkat
- Ac Power: Ower Apparent PDokumen2 halamanAc Power: Ower Apparent PJason ChiangBelum ada peringkat
- Theorem 1 (Uniform Stability For Non-Autonomous Systems)Dokumen18 halamanTheorem 1 (Uniform Stability For Non-Autonomous Systems)Jason ChiangBelum ada peringkat
- 9 NNC Part1 PDFDokumen36 halaman9 NNC Part1 PDFJason ChiangBelum ada peringkat
- Display Technologies: Kevin LongDokumen34 halamanDisplay Technologies: Kevin LongJason ChiangBelum ada peringkat
- 5.updated Draft Review of Modern ControlDokumen72 halaman5.updated Draft Review of Modern ControlJason ChiangBelum ada peringkat
- Aerospace Applications of Control of Smart Structures - Part 1Dokumen47 halamanAerospace Applications of Control of Smart Structures - Part 1Jason ChiangBelum ada peringkat
- 964019E PRV ElectricDokumen2 halaman964019E PRV ElectricHugh SagoBelum ada peringkat
- Do's and Don'Ts For Eq Resistant Design of BuildingsDokumen44 halamanDo's and Don'Ts For Eq Resistant Design of BuildingsPraveen Gavad100% (1)
- Parts Manual Ec210d-75-100Dokumen26 halamanParts Manual Ec210d-75-100Suharto Zuhri100% (1)
- Gpu400 120Dokumen2 halamanGpu400 120dedonezaBelum ada peringkat
- Dynomax 5in 7850 Motor Spec SheetDokumen1 halamanDynomax 5in 7850 Motor Spec SheetChinyere NkereBelum ada peringkat
- Project Report On Double Wall Corrugated (DWC) PipesDokumen10 halamanProject Report On Double Wall Corrugated (DWC) PipesEIRI Board of Consultants and PublishersBelum ada peringkat
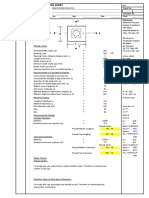
- Pilecap Sizing: Bukit Keteri (Pg3-Pc1)Dokumen8 halamanPilecap Sizing: Bukit Keteri (Pg3-Pc1)azwanBelum ada peringkat
- IndicatorsDokumen4 halamanIndicatorsLuis Alejandro Mariño - RamguzBelum ada peringkat
- Alfa Laval S927 FO PurifierDokumen209 halamanAlfa Laval S927 FO Purifieriacovosf836100% (3)
- Robotics Unit1 SlidesDokumen65 halamanRobotics Unit1 SlidesJanarthanan BalakrishnasamyBelum ada peringkat
- Pipes For Industrial Application enDokumen60 halamanPipes For Industrial Application enم.وليد شكرBelum ada peringkat
- Frames MachinesDokumen18 halamanFrames MachinesAkshay Arya100% (1)
- Pertemuan Kedua Dan Ketiga AKMDokumen45 halamanPertemuan Kedua Dan Ketiga AKMJohan NicholasBelum ada peringkat
- PETRO Filtration Donaldson Fuel and OilDokumen32 halamanPETRO Filtration Donaldson Fuel and OilGustavoBelum ada peringkat
- 5.3 Effective Moduli of CFRP LaminaDokumen20 halaman5.3 Effective Moduli of CFRP LaminaGanesh.MahendraBelum ada peringkat
- MRD Mrde MRV Mrve PDFDokumen48 halamanMRD Mrde MRV Mrve PDFmanutecnicoBelum ada peringkat
- GE Codigos Error Estufas, Lavavajillas, Microondas PDFDokumen5 halamanGE Codigos Error Estufas, Lavavajillas, Microondas PDFElvis Jesus Landa ReyesBelum ada peringkat
- Hermle C42 ENDokumen72 halamanHermle C42 ENKiril AngelovBelum ada peringkat
- One Way BearingDokumen3 halamanOne Way BearingMohd Asri Taip100% (1)
- Presentasi AwalDokumen77 halamanPresentasi AwalFadil AdamBelum ada peringkat
- Installation Procedure For The Fuel Transfer Kit On The Hydraulic Electronic Unit Injector (HEUI) Pump (1256)Dokumen13 halamanInstallation Procedure For The Fuel Transfer Kit On The Hydraulic Electronic Unit Injector (HEUI) Pump (1256)eliecerBelum ada peringkat
- Brosur Extraction Manifold WatersDokumen6 halamanBrosur Extraction Manifold Waterschaerul.anwar554Belum ada peringkat
- Alfa Romeo 146 Parts TableDokumen53 halamanAlfa Romeo 146 Parts TableeephantomBelum ada peringkat
- API - FB (Cavity Relief)Dokumen5 halamanAPI - FB (Cavity Relief)rossifrancescoBelum ada peringkat
- Parts Catalog: Revision 1Dokumen269 halamanParts Catalog: Revision 1Yesenia GonzalezBelum ada peringkat
- Technical Data LovejoyDokumen4 halamanTechnical Data LovejoyAmandeep SinghBelum ada peringkat
- CHANGES in AISC's SEISMIC PROVISIONS: AISC 341-05 To AISC 341-10Dokumen68 halamanCHANGES in AISC's SEISMIC PROVISIONS: AISC 341-05 To AISC 341-10Anonymous 7MdZQn167% (3)
- Sea Saw Gen FinalDokumen27 halamanSea Saw Gen FinalSanjay Jadhav67% (3)
- Catalogo Equipos de Camiones 1Dokumen124 halamanCatalogo Equipos de Camiones 1Guillermo GutierrezBelum ada peringkat