Anda mungkin juga menyukai
- Certi Ed Professional: Kaspersky Endpoint Security and Management (002.11.6)Dokumen6 halamanCerti Ed Professional: Kaspersky Endpoint Security and Management (002.11.6)AnamBelum ada peringkat
- Home Automation Using Cisco Packet TracerDokumen8 halamanHome Automation Using Cisco Packet Tracerhimanshu kumar100% (3)
- Abt-Ccp299-Tis 2013-09 PDFDokumen66 halamanAbt-Ccp299-Tis 2013-09 PDFRichard BritoBelum ada peringkat
- Multilizer PDF Translator Full Crack PDFDokumen4 halamanMultilizer PDF Translator Full Crack PDFChristian Barreto0% (3)
- Introduction To The Linux KernelDokumen51 halamanIntroduction To The Linux Kernelbharath_mv7-1Belum ada peringkat
- VX WorksDokumen42 halamanVX Worksrakeshkalathil100% (1)
- Vxworks - Final PDFDokumen125 halamanVxworks - Final PDFBhanu Prakash K100% (1)
- Unit - 4 & 5Dokumen86 halamanUnit - 4 & 5Chaturya DoddiBelum ada peringkat
- Lecture 2: Implementation Alternatives & Concurrent Programming Implementation AlternativesDokumen8 halamanLecture 2: Implementation Alternatives & Concurrent Programming Implementation Alternativespkrsuresh2013Belum ada peringkat
- Embedded SystemsDokumen27 halamanEmbedded Systemsvenkat7186Belum ada peringkat
- Elg 6171 Scheduling PresentationDokumen20 halamanElg 6171 Scheduling PresentationMoulali SkBelum ada peringkat
- Simplified Design Flow: (A Picture From Ingo Sander)Dokumen37 halamanSimplified Design Flow: (A Picture From Ingo Sander)Rachana SrinivasBelum ada peringkat
- RTXC Real Time Executive in CDokumen63 halamanRTXC Real Time Executive in Cvansi84Belum ada peringkat
- Real Time Operating System Based Design-1Dokumen121 halamanReal Time Operating System Based Design-1Prajna S BhatBelum ada peringkat
- Con CurrencyDokumen33 halamanCon CurrencymirandamonBelum ada peringkat
- Realtime Linux (RTAI) - Radboud University Nijmegen Exercise #2 Multi-TaskingDokumen7 halamanRealtime Linux (RTAI) - Radboud University Nijmegen Exercise #2 Multi-TaskingPedro Ortiz MendezBelum ada peringkat
- Copia Di Freertos - v1.7 - Cmsis Os APIDokumen260 halamanCopia Di Freertos - v1.7 - Cmsis Os APIantlebBelum ada peringkat
- Embedded Systems Overview: - RTOS/EOS Design ConceptDokumen19 halamanEmbedded Systems Overview: - RTOS/EOS Design ConceptbravotolitsBelum ada peringkat
- Corestart Whats New Performance Dotnet Core 2 0Dokumen56 halamanCorestart Whats New Performance Dotnet Core 2 0elisaBelum ada peringkat
- Embedded RTOS TasksDokumen42 halamanEmbedded RTOS TaskshvrkBelum ada peringkat
- SuperscalarDokumen38 halamanSuperscalarNusrat Mary ChowdhuryBelum ada peringkat
- Embedded - PPT - 4-5 Unit - DR Monika-EditedDokumen87 halamanEmbedded - PPT - 4-5 Unit - DR Monika-EditedProf.Monika JainBelum ada peringkat
- PostgreSQL Query Optimization TechniquesDokumen50 halamanPostgreSQL Query Optimization TechniquesMohammad Mizanur RahmanBelum ada peringkat
- Scheduling in Linux and Windows 2000Dokumen34 halamanScheduling in Linux and Windows 2000darshil shahBelum ada peringkat
- Elements of Processor Management: CIS 250 Operating SystemsDokumen36 halamanElements of Processor Management: CIS 250 Operating SystemsAsawari SurveBelum ada peringkat
- ES&RTOS Unit-2Dokumen45 halamanES&RTOS Unit-2Sai KallemBelum ada peringkat
- Labview Multicore SystemsDokumen86 halamanLabview Multicore SystemsnisargBelum ada peringkat
- Dynamic Memory AllocationDokumen26 halamanDynamic Memory AllocationMirandaBelum ada peringkat
- Advanced CDokumen117 halamanAdvanced Capi-3776776100% (1)
- Advanced C: - Sushma - UkilDokumen117 halamanAdvanced C: - Sushma - UkilRamachandram JangiliBelum ada peringkat
- DWHDokumen18 halamanDWHsumaira khanBelum ada peringkat
- Basic Operating System ConceptsDokumen54 halamanBasic Operating System Conceptssybell8Belum ada peringkat
- A Study On Hyper-Threading: Vimal Reddy Ambarish Sule Aravindh AnantaramanDokumen29 halamanA Study On Hyper-Threading: Vimal Reddy Ambarish Sule Aravindh AnantaramanVetrivel SubramaniBelum ada peringkat
- Java Multi Threading 1Dokumen11 halamanJava Multi Threading 1N Guru PrasadBelum ada peringkat
- Slides12 04Dokumen47 halamanSlides12 04don504Belum ada peringkat
- Multitasking and Resource Sharing in Embedded SystemsDokumen31 halamanMultitasking and Resource Sharing in Embedded SystemsKhaled RelaTivBelum ada peringkat
- A1 OS ReviewDokumen53 halamanA1 OS ReviewThyaga RajBelum ada peringkat
- RTOS uCOS IIDokumen66 halamanRTOS uCOS IIAkshay BhosaleBelum ada peringkat
- Operating Systems Process Concepts and Scheduling AlgorithmsDokumen52 halamanOperating Systems Process Concepts and Scheduling AlgorithmsGopal KarmakarBelum ada peringkat
- Ch04 Network DesignDokumen45 halamanCh04 Network DesignEric KialBelum ada peringkat
- PytorchDokumen38 halamanPytorchjr.developer.78Belum ada peringkat
- EE-379 Embedded Systems and Applications: Real Time Operating Systems (RTOS) Part 1: Processes or Tasks and ThreadsDokumen22 halamanEE-379 Embedded Systems and Applications: Real Time Operating Systems (RTOS) Part 1: Processes or Tasks and ThreadsaesyopBelum ada peringkat
- Unit2 PDFDokumen30 halamanUnit2 PDFnARendRA sAIBelum ada peringkat
- So What Makes An RTOS Special?Dokumen8 halamanSo What Makes An RTOS Special?Mahmoud NaguibBelum ada peringkat
- Advanced C: - UdayDokumen117 halamanAdvanced C: - UdayRaghavendra Rajendra Basvan100% (1)
- Threads in Operating SystemDokumen103 halamanThreads in Operating SystemMonika SahuBelum ada peringkat
- AnsDokumen2 halamanAnsTHAKKAR NARAYAN JAISUKHLALBelum ada peringkat
- Unit-IV: Inter-Process CommunicationDokumen61 halamanUnit-IV: Inter-Process CommunicationdrkhamuruddeenBelum ada peringkat
- VxWorks6 7Dokumen93 halamanVxWorks6 7Raghunath N JettyBelum ada peringkat
- Aos - W03Dokumen21 halamanAos - W03GES ISLAMIA PATTOKIBelum ada peringkat
- Process and Thread Concurrency ModelsDokumen33 halamanProcess and Thread Concurrency ModelsSeham123123Belum ada peringkat
- Embedded C Programming GuideDokumen57 halamanEmbedded C Programming GuidePhạm Đức Sáng100% (1)
- Lecture #4, OS Threads and ProcessesDokumen20 halamanLecture #4, OS Threads and ProcessesHikmatullah SaqibBelum ada peringkat
- Process and Threads - LinuxDokumen34 halamanProcess and Threads - LinuxQuontraSolutionsBelum ada peringkat
- EcosDokumen36 halamanEcosarunmethaBelum ada peringkat
- Unit - 4 ErtosDokumen69 halamanUnit - 4 ErtosAbhi VarmaBelum ada peringkat
- Chapter 7: Runtime Environment: - Run Time Memory OrganizationDokumen18 halamanChapter 7: Runtime Environment: - Run Time Memory OrganizationAlex Solomon ABelum ada peringkat
- Unit IV Rtos Based Embedded System DesignDokumen121 halamanUnit IV Rtos Based Embedded System DesignAnanda muthu mani K43% (7)
- Vxworks and Embedded LinuxDokumen26 halamanVxworks and Embedded LinuxLalith KrishnanBelum ada peringkat
- CS 194: Distributed Systems Processes, Threads, Code MigrationDokumen26 halamanCS 194: Distributed Systems Processes, Threads, Code MigrationShivakumar BarupatiBelum ada peringkat
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Dari EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Belum ada peringkat
- Aliance TutorialDokumen87 halamanAliance TutorialMonica Jackson PanovskaBelum ada peringkat
- MIT6 012S09 Lec01Dokumen23 halamanMIT6 012S09 Lec01Gopi KrishnaBelum ada peringkat
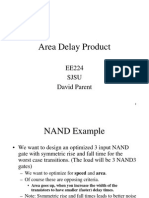
- NAND Example Area Delay Product OptimizationDokumen25 halamanNAND Example Area Delay Product OptimizationSiva KrishnaBelum ada peringkat
- Col10553-1 3 PDFDokumen47 halamanCol10553-1 3 PDFSiva KrishnaBelum ada peringkat
- Archimedes, The Free 2D Semicondutor Device SimulatorDokumen89 halamanArchimedes, The Free 2D Semicondutor Device SimulatorSiva KrishnaBelum ada peringkat
- Base PaperDokumen6 halamanBase PaperSiva KrishnaBelum ada peringkat
- Fpgas: An Overview: Sanjiv MalikDokumen24 halamanFpgas: An Overview: Sanjiv MalikSiva KrishnaBelum ada peringkat
- Mos Mismatch-2 PDFDokumen7 halamanMos Mismatch-2 PDFSiva KrishnaBelum ada peringkat
- Modeling and Simulation of Mos Mis Match PDFDokumen8 halamanModeling and Simulation of Mos Mis Match PDFSiva KrishnaBelum ada peringkat
- Lec 1Dokumen4 halamanLec 1Siva KrishnaBelum ada peringkat
- FPGA Implementation of Convolutional Encoder and Hard Decision Viterbi DecoderDokumen5 halamanFPGA Implementation of Convolutional Encoder and Hard Decision Viterbi DecoderSiva KrishnaBelum ada peringkat
- Trans Analysis1Dokumen39 halamanTrans Analysis1Wala SaadehBelum ada peringkat
- Polyphase Pulse Comprssion Codes With Optimal SidelobesDokumen9 halamanPolyphase Pulse Comprssion Codes With Optimal SidelobesSiva KrishnaBelum ada peringkat
- Verilog AMS TutorialDokumen29 halamanVerilog AMS TutorialSiva KrishnaBelum ada peringkat
- Matlab Command FunctionsDokumen17 halamanMatlab Command FunctionsbehroozfBelum ada peringkat
- (Ebook - Electronics) - Analog and Mixed Signal Vlsi CircuitDokumen418 halaman(Ebook - Electronics) - Analog and Mixed Signal Vlsi CircuitPuja GuptaBelum ada peringkat
- File 5eb1cd9f24a07a58 Recommended Books For ECE G..Dokumen5 halamanFile 5eb1cd9f24a07a58 Recommended Books For ECE G..Siva KrishnaBelum ada peringkat
- MOS Biasing Circuit Analysis and DesignDokumen6 halamanMOS Biasing Circuit Analysis and DesignSiva KrishnaBelum ada peringkat
- Cadence ManualDokumen51 halamanCadence Manualapi-27099960100% (4)
- What Is The Electron Spin?: by Gengyun LiDokumen91 halamanWhat Is The Electron Spin?: by Gengyun LiSiva Krishna100% (1)
- (Ebook - Electronics) - Analog and Mixed Signal Vlsi CircuitDokumen418 halaman(Ebook - Electronics) - Analog and Mixed Signal Vlsi CircuitPuja GuptaBelum ada peringkat
- Desinging Analog ChipsDokumen242 halamanDesinging Analog ChipsRyan Sullenberger100% (12)
- Anadigm® FPAA Solution For Sensor Signal ConditioningDokumen10 halamanAnadigm® FPAA Solution For Sensor Signal ConditioningSiva KrishnaBelum ada peringkat
- SLC Vs MLC WhitepaperDokumen9 halamanSLC Vs MLC WhitepaperSusi WijiyatiBelum ada peringkat
- Lecture5 MOSDokumen15 halamanLecture5 MOSSiva KrishnaBelum ada peringkat
- Mc36 Specification SheetDokumen2 halamanMc36 Specification Sheetetud3clBelum ada peringkat
- Microprocessor Lab ManualDokumen74 halamanMicroprocessor Lab ManualDhiraj IppiliBelum ada peringkat
- MIPS OpcodesDokumen3 halamanMIPS OpcodesAruna RajanBelum ada peringkat
- The Abbott Pocket Guide To Practical Peripheral Nerve BlockadeDokumen2 halamanThe Abbott Pocket Guide To Practical Peripheral Nerve BlockadeNyeinchan Soe100% (1)
- Digital Electronics and Microprocessor Lecture NotesDokumen187 halamanDigital Electronics and Microprocessor Lecture Notes514 Vaibhavi PawarBelum ada peringkat
- DCS-931L: Quick Install GuideDokumen16 halamanDCS-931L: Quick Install GuideAnonymous HVS4CqW67Belum ada peringkat
- Fortigate Wanopt Cache Proxy 520 PDFDokumen153 halamanFortigate Wanopt Cache Proxy 520 PDFMaría José ParrasBelum ada peringkat
- AltconfigDokumen20 halamanAltconfigRiteesh AgrawalBelum ada peringkat
- Introduction to Operating System StructuresDokumen18 halamanIntroduction to Operating System StructuresSahil NagarBelum ada peringkat
- Quickstart 750-880Dokumen414 halamanQuickstart 750-880Selom AgbaglaBelum ada peringkat
- Chapter 3: Characterizing The Existing InternetworkDokumen3 halamanChapter 3: Characterizing The Existing InternetworkKatherineBelum ada peringkat
- Serial Camera Module Programming Instructions and Tutorial PDFDokumen11 halamanSerial Camera Module Programming Instructions and Tutorial PDFeanneBelum ada peringkat
- MP l2 Vpns Xe 3s Asr920 BookDokumen204 halamanMP l2 Vpns Xe 3s Asr920 BookR.K. ThapaBelum ada peringkat
- CCN Lab 8 ICMPDokumen9 halamanCCN Lab 8 ICMPWaleed RazzaqBelum ada peringkat
- Low Cost 1 Gbps Full Duplex Wireless SolutionDokumen2 halamanLow Cost 1 Gbps Full Duplex Wireless SolutionHildy SanchezBelum ada peringkat
- HBase Succinctly PDFDokumen85 halamanHBase Succinctly PDFrisjakBelum ada peringkat
- Quantum Composers White Paper - Ethernet ConnectivityDokumen5 halamanQuantum Composers White Paper - Ethernet ConnectivityQuantum Composers, Inc.Belum ada peringkat
- Office 2016 Removal Utility LogDokumen10 halamanOffice 2016 Removal Utility LogSpookyBelum ada peringkat
- Asterisx Limpio Results CWESANSTop25 PDFDokumen159 halamanAsterisx Limpio Results CWESANSTop25 PDFFredy AvilaBelum ada peringkat
- Oracle 11gR2 Clusterware Startup SequenceDokumen4 halamanOracle 11gR2 Clusterware Startup SequencePraveen KumarBelum ada peringkat
- Ips BasicsDokumen19 halamanIps BasicsaloneheartsBelum ada peringkat
- HPC Unit Test QuestionsDokumen5 halamanHPC Unit Test QuestionsBECOB204 Sumaira HedaooBelum ada peringkat
- TUGAS 8 ARSITEKTUR KOMPUTER - Tumiar Angel Tampubolon - 200402118Dokumen5 halamanTUGAS 8 ARSITEKTUR KOMPUTER - Tumiar Angel Tampubolon - 200402118TUMIAR ANGEL TAMPUBOLON 200402118Belum ada peringkat
- Forticlient PDFDokumen4 halamanForticlient PDFmouhamadou adamou daoudaBelum ada peringkat
- Beginning FPGA Programming - Partie17Dokumen5 halamanBeginning FPGA Programming - Partie17ali alilouBelum ada peringkat
- PwntoolsDokumen343 halamanPwntoolsMahesh PatilBelum ada peringkat