Anda mungkin juga menyukai
- Problemas (101 200)Dokumen39 halamanProblemas (101 200)Pedro SônegoBelum ada peringkat
- Lista de Exercícios Circuitos ElétricosDokumen35 halamanLista de Exercícios Circuitos ElétricosRenato Al100% (1)
- Resolução Anm #68, de 30 de Abril de 2021 - Resolução Anm #68, de 30 de Abril de 2021 - Dou - Imprensa NacionalDokumen4 halamanResolução Anm #68, de 30 de Abril de 2021 - Resolução Anm #68, de 30 de Abril de 2021 - Dou - Imprensa Nacionalpedro martucciBelum ada peringkat
- Relatório AP2Dokumen15 halamanRelatório AP2Danilo VieiraBelum ada peringkat
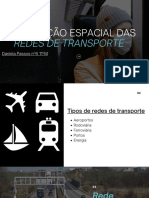
- Transporte de Materiais Karen e DahianeDokumen81 halamanTransporte de Materiais Karen e DahianePascal CustonBelum ada peringkat
- Bombas Hidraulicas PDFDokumen270 halamanBombas Hidraulicas PDFclaudioBelum ada peringkat
- Como examinar um pistãoDokumen9 halamanComo examinar um pistãoAdriano ColusiBelum ada peringkat
- Problemas sobre Oscilador HarmônicoDokumen7 halamanProblemas sobre Oscilador HarmônicoLucas CordeiroBelum ada peringkat
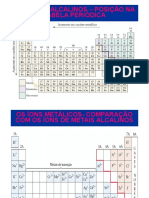
- Metais AlcalinosDokumen67 halamanMetais AlcalinosPedro RicardoBelum ada peringkat
- Colégio Pedro II - Aprofundamento de MatemáticaDokumen2 halamanColégio Pedro II - Aprofundamento de Matemáticacarlos de sousa100% (1)
- Documentário Sobre Saúde A Alimentação VivaDokumen81 halamanDocumentário Sobre Saúde A Alimentação VivaPaty ZorzenonBelum ada peringkat
- Distribuição Espacial Das Redes de TransporteDokumen28 halamanDistribuição Espacial Das Redes de TransporteDaniela PassosBelum ada peringkat
- Questões Física Fundamentos Energia MecânicaDokumen3 halamanQuestões Física Fundamentos Energia MecânicaLaiz Leite67% (3)
- Manual SEFDokumen73 halamanManual SEFEDUARDO-FRED100% (1)
- TCC - Apresentação Medidor de Consumo de Energia Elétrica Com Esp8266 - 2018-1 v1Dokumen32 halamanTCC - Apresentação Medidor de Consumo de Energia Elétrica Com Esp8266 - 2018-1 v1GersonSenaBelum ada peringkat
- Marcelo Araujo - Sistemas Elétricos - Aula 01Dokumen60 halamanMarcelo Araujo - Sistemas Elétricos - Aula 01Louise RosaBelum ada peringkat
- Instalações elétricas campo futebol UFVJMDokumen39 halamanInstalações elétricas campo futebol UFVJMguiill9009Belum ada peringkat
- Parametros de Corte FresamentoDokumen5 halamanParametros de Corte FresamentoAndré PissolattiBelum ada peringkat
- Extensão 7.2Dokumen32 halamanExtensão 7.2Pedro FloresBelum ada peringkat
- Manual eletrificador cercaDokumen20 halamanManual eletrificador cercaejortBelum ada peringkat
- Potência Elétrica: Conceitos e Triângulo de PotênciasDokumen20 halamanPotência Elétrica: Conceitos e Triângulo de PotênciasAnderson GabrielBelum ada peringkat
- Proteção e comando de motores elétricosDokumen95 halamanProteção e comando de motores elétricosroddiasdrBelum ada peringkat
- DinamicaDokumen14 halamanDinamicajeversonprofBelum ada peringkat
- Exercicio Resolvido EstequiometriaDokumen7 halamanExercicio Resolvido EstequiometriawggonzagaBelum ada peringkat
- TCC Amanda Zilli-Versão FinalDokumen71 halamanTCC Amanda Zilli-Versão FinalLeonardoBelum ada peringkat
- Antenas 18fev08Dokumen34 halamanAntenas 18fev08diney m e willemen100% (17)
- Energia solar casaDokumen23 halamanEnergia solar casaRodrigo FernandesBelum ada peringkat
- Trabalho de FisicaDokumen11 halamanTrabalho de FisicaMarciliaBelum ada peringkat
- A Resolução Conama N°393/07 Nas Atividades de Produção de PetróleoDokumen1 halamanA Resolução Conama N°393/07 Nas Atividades de Produção de Petróleoboy.eacBelum ada peringkat
- Reflexao Eficiência TérmicaDokumen16 halamanReflexao Eficiência TérmicaArtur Tadeu SolettoBelum ada peringkat