Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Agricultural MotorDokumen6 halamanAgricultural MotorSailesh BuntyBelum ada peringkat
- Agricultural MotorDokumen6 halamanAgricultural MotorSailesh BuntyBelum ada peringkat
- Atm Card Theft Identification and Remote Information SystemDokumen7 halamanAtm Card Theft Identification and Remote Information SystemSailesh BuntyBelum ada peringkat
- List of Adobe Photoshop CS5 Shortcut KeysDokumen20 halamanList of Adobe Photoshop CS5 Shortcut KeysrohitembeddedBelum ada peringkat
- Cardiovascular SyatemDokumen19 halamanCardiovascular SyatemSailesh BuntyBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- 1.2D Viewing TransformationsDokumen127 halaman1.2D Viewing TransformationsAbhigyan HarshaBelum ada peringkat
- Red Hat Enterprise Linux-7-Virtualization Deployment and Administration Guide-en-US PDFDokumen551 halamanRed Hat Enterprise Linux-7-Virtualization Deployment and Administration Guide-en-US PDFRomain KoffiBelum ada peringkat
- Sheet 2Dokumen4 halamanSheet 2Ahmed GamalBelum ada peringkat
- Module 3-Lesson 4Dokumen6 halamanModule 3-Lesson 4Kel LumawanBelum ada peringkat
- 6762792 (1)Dokumen2 halaman6762792 (1)BenjaBelum ada peringkat
- Stream CipherDokumen214 halamanStream CipherAyush TibrewalaBelum ada peringkat
- Acer Veriton S661 QSDokumen3 halamanAcer Veriton S661 QSAspurlah Mohamed Jidi IBelum ada peringkat
- DiyuDokumen8 halamanDiyunaturewisdomBelum ada peringkat
- Ajax CheatSheetDokumen7 halamanAjax CheatSheetdrypzBelum ada peringkat
- Condor ManualDokumen43 halamanCondor ManualPierulisBelum ada peringkat
- Rsae ITP QA: Document Review and Cover Sheet Company: Construction ContractorDokumen5 halamanRsae ITP QA: Document Review and Cover Sheet Company: Construction ContractorUtku Can KılıçBelum ada peringkat
- PT. Daya Mulia Turangga: Riko Wahyu DarusmanDokumen1 halamanPT. Daya Mulia Turangga: Riko Wahyu DarusmanAinur Bamol NamsembilanBelum ada peringkat
- Ip Telephony Voi P SystemDokumen22 halamanIp Telephony Voi P SystemFreeman JacksonBelum ada peringkat
- Esteban Roman III Resume 2023 PDFDokumen2 halamanEsteban Roman III Resume 2023 PDFapi-678574450Belum ada peringkat
- Flexible Renamer.#Dokumen69 halamanFlexible Renamer.#Gerardo Led HendrixBelum ada peringkat
- IEEE Xplore Abstract - Automatic Recommendation of API Methods From Feature RequestsDokumen2 halamanIEEE Xplore Abstract - Automatic Recommendation of API Methods From Feature RequestsKshitija SahaniBelum ada peringkat
- Programmable Zone Sensor: Installation, Operation, and MaintenanceDokumen32 halamanProgrammable Zone Sensor: Installation, Operation, and MaintenanceEdison EspinalBelum ada peringkat
- 10 1 1 37 307Dokumen50 halaman10 1 1 37 307Oluponmile AdeolaBelum ada peringkat
- LT5012 PCB BroInside Final PDFDokumen39 halamanLT5012 PCB BroInside Final PDFDavid LopezBelum ada peringkat
- Anguttaranikaya 5Dokumen437 halamanAnguttaranikaya 5Hansi ZhaiBelum ada peringkat
- Ipremier CaseDokumen29 halamanIpremier CaseRam Singh100% (1)
- Ark Embarked On Their VoyageDokumen25 halamanArk Embarked On Their VoyageChris Cider ThompsonBelum ada peringkat
- Statement: Foundation AccountDokumen12 halamanStatement: Foundation AccountJN Adingra0% (1)
- TPS54528 4.5-V To 18-V Input, 5-A Synchronous Step-Down Converter With Eco-Mode™Dokumen26 halamanTPS54528 4.5-V To 18-V Input, 5-A Synchronous Step-Down Converter With Eco-Mode™RADIO TG-JIUBelum ada peringkat
- Process Flow in Repetitive Manufacturing of Sap PP PDFDokumen8 halamanProcess Flow in Repetitive Manufacturing of Sap PP PDFHernandezPlauchú IvánBelum ada peringkat
- Test - Management (Robbins & Coulter) - Chapter 18 - Quizlet4Dokumen6 halamanTest - Management (Robbins & Coulter) - Chapter 18 - Quizlet4Muhammad HaroonBelum ada peringkat
- VariablestypesDokumen4 halamanVariablestypesJasvan SundarBelum ada peringkat
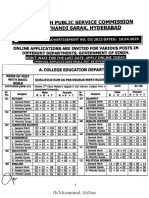
- 1000+ Education, Police & Anti Corruption Jobs Through SPSCDokumen12 halaman1000+ Education, Police & Anti Corruption Jobs Through SPSCZahid AliBelum ada peringkat
- Huawei Traffic Balance ApproachDokumen3 halamanHuawei Traffic Balance ApproachSandeepBelum ada peringkat
- Beckhoff Main Catalog 2021 Volume2Dokumen800 halamanBeckhoff Main Catalog 2021 Volume2ipmcmtyBelum ada peringkat