Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Beginning Android DevelopmentDokumen721 halamanBeginning Android DevelopmentNikola Johnny Popadic67% (3)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
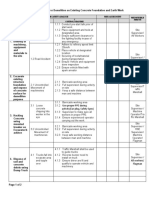
- ULSADO-JSA-Demolation Existing Concrete FoundationDokumen2 halamanULSADO-JSA-Demolation Existing Concrete FoundationKelvin Tan75% (4)
- Sap Bods TutorialDokumen26 halamanSap Bods TutorialPavan Sandeep V V0% (1)
- Sap Bods TutorialDokumen26 halamanSap Bods TutorialPavan Sandeep V V0% (1)
- MPC6515 ManualDokumen37 halamanMPC6515 ManualJerome CeleraBelum ada peringkat
- OMEGA AIR Alternative Filter Elements English PDFDokumen56 halamanOMEGA AIR Alternative Filter Elements English PDFbinhleduc36Belum ada peringkat
- Static Electricity and Charge AccumulationDokumen75 halamanStatic Electricity and Charge AccumulationArjav DesaiBelum ada peringkat
- Boq Grand SummaryDokumen44 halamanBoq Grand Summaryelsabet gezahegnBelum ada peringkat
- RDSO - Vendor Directory July 16 FinalDokumen233 halamanRDSO - Vendor Directory July 16 Finalabhics6750% (2)
- Synchronization of GeneratorsDokumen3 halamanSynchronization of Generatorsneo_nitinBelum ada peringkat
- Design and Development of DAS For Measurement of Low Level and Low Frequency Electric FieldsDokumen41 halamanDesign and Development of DAS For Measurement of Low Level and Low Frequency Electric FieldsPavan Sandeep V VBelum ada peringkat
- Project With Header Spring 2015 PDFDokumen111 halamanProject With Header Spring 2015 PDFPavan Sandeep V VBelum ada peringkat
- Sap Bods TutorialDokumen9 halamanSap Bods TutorialPavan Sandeep V VBelum ada peringkat
- 08 Chapter 2Dokumen13 halaman08 Chapter 2Pavan Sandeep V VBelum ada peringkat
- Sap Bods TutorialDokumen9 halamanSap Bods TutorialPavan Sandeep V VBelum ada peringkat
- Manuals Tvs WegoDokumen73 halamanManuals Tvs WegoPavan Sandeep V V0% (1)
- GLCP sequential linear programming methodDokumen8 halamanGLCP sequential linear programming methodPavan Sandeep V VBelum ada peringkat
- Manuals Tvs WegoDokumen73 halamanManuals Tvs WegoPavan Sandeep V V0% (1)
- CSDM-WebDev User Guide10bDokumen16 halamanCSDM-WebDev User Guide10bPavan Sandeep V VBelum ada peringkat
- Photonic Crystal Fiber2Dokumen14 halamanPhotonic Crystal Fiber2Pavan Sandeep V VBelum ada peringkat
- New Microsoft Word DocumentDokumen2 halamanNew Microsoft Word DocumentPavan Sandeep V VBelum ada peringkat
- VizianagaramDokumen32 halamanVizianagaramPavan Sandeep V VBelum ada peringkat
- Salesforce Creating On Demand AppsDokumen412 halamanSalesforce Creating On Demand AppsPavan Sandeep V VBelum ada peringkat
- Room BookingDokumen65 halamanRoom BookingPavan Sandeep V VBelum ada peringkat
- UseCase 1Dokumen4 halamanUseCase 1Pavan Sandeep V VBelum ada peringkat
- Direct Hooke and Jeeves Optimization For Nonsmooth ModelsDokumen19 halamanDirect Hooke and Jeeves Optimization For Nonsmooth ModelselataniBelum ada peringkat
- M.Tech. Sensor Systems Technology Curriculum GuideDokumen33 halamanM.Tech. Sensor Systems Technology Curriculum GuidePavan Sandeep V VBelum ada peringkat
- RafaelDokumen185 halamanRafaelhemanta57jenaBelum ada peringkat
- Final Report v3Dokumen146 halamanFinal Report v3Pavan Sandeep V VBelum ada peringkat
- Circuit AnalysisDokumen90 halamanCircuit AnalysisPavan Sandeep V VBelum ada peringkat
- CMM007 2013 PDFDokumen6 halamanCMM007 2013 PDFPavan Sandeep V VBelum ada peringkat
- Project With Header Spring 2015Dokumen111 halamanProject With Header Spring 2015Pavan Sandeep V VBelum ada peringkat
- Field PointDokumen5 halamanField PointPavan Sandeep V VBelum ada peringkat
- O2 Blue User Manual v2Dokumen16 halamanO2 Blue User Manual v2Pavan Sandeep V VBelum ada peringkat
- CCNA 4 Final Exam - Connecting Networks (Version 5.02) - CCNA5Dokumen15 halamanCCNA 4 Final Exam - Connecting Networks (Version 5.02) - CCNA5Pavan Sandeep V VBelum ada peringkat
- A.Ravalika A.KrishnaveniDokumen1 halamanA.Ravalika A.KrishnaveniPavan Sandeep V VBelum ada peringkat
- Alcohol Vapor Sensors Multi-Walled Carbon: Ultra-Low-Power Based On NanotubeDokumen5 halamanAlcohol Vapor Sensors Multi-Walled Carbon: Ultra-Low-Power Based On NanotubePavan Sandeep V VBelum ada peringkat
- Everything you need to know about your new washing machineDokumen20 halamanEverything you need to know about your new washing machinesenhbox4180Belum ada peringkat
- Ma3022 Propeller Drydockingworks 1 Aug05Dokumen18 halamanMa3022 Propeller Drydockingworks 1 Aug05NAGENDRA KUMAR DBelum ada peringkat
- Xxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedDokumen2 halamanXxxpol / 65° Az 17.3 / 17.0 / 17.3 Dbi: DiplexedMahamoud HamoudBelum ada peringkat
- TL2 Number SystemsDokumen78 halamanTL2 Number SystemsKhushbu SavaliyaBelum ada peringkat
- Portfolio Isaura SagredoDokumen22 halamanPortfolio Isaura SagredoIsauraBelum ada peringkat
- Customer service records for auto repairsDokumen30 halamanCustomer service records for auto repairsAsad LaghariBelum ada peringkat
- 12V-84Ah lithium-ion battery pack specificationsDokumen2 halaman12V-84Ah lithium-ion battery pack specificationsramshukla2001Belum ada peringkat
- Dell Operation ManagementDokumen13 halamanDell Operation ManagementIsha GosainBelum ada peringkat
- 2023.04.24 BSNL FTTH LeafletDokumen2 halaman2023.04.24 BSNL FTTH LeafletSatan SinghBelum ada peringkat
- Ulei Honda Jazz 1.4i CVTDokumen1 halamanUlei Honda Jazz 1.4i CVTcmlad1Belum ada peringkat
- ESP ARECA Manual 03112011Dokumen22 halamanESP ARECA Manual 03112011sridharBelum ada peringkat
- N-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDDokumen9 halamanN-Channel Low QG Mosfet 30V, 100A, 3.3m: MOS-TECH Semiconductor Co.,LTDAnonymous p1ig0zX6p0Belum ada peringkat
- Scie 5 q1 Week 1 FinalDokumen74 halamanScie 5 q1 Week 1 FinalPrecilla HalagoBelum ada peringkat
- TBR Wipro LeanDokumen8 halamanTBR Wipro LeanAnonymous fVnV07HBelum ada peringkat
- TAICDokumen8 halamanTAICparthBelum ada peringkat
- Traffic Engineering Bachelor of Science in Civil EngineeringDokumen22 halamanTraffic Engineering Bachelor of Science in Civil EngineeringDaisy AstijadaBelum ada peringkat
- Durehete 1055Dokumen5 halamanDurehete 1055alextentwenty100% (1)
- 2012 JBLM MILCON Tacoma Chamber of Commerce Oct2012Dokumen13 halaman2012 JBLM MILCON Tacoma Chamber of Commerce Oct2012Brackett427Belum ada peringkat
- Sae j419 1983 Methods of Measuring Decarburization PDFDokumen8 halamanSae j419 1983 Methods of Measuring Decarburization PDFSumeet SainiBelum ada peringkat
- Efecto de La Temperatura Del Hipoclorito de SodioDokumen4 halamanEfecto de La Temperatura Del Hipoclorito de SodioMarriano DarinoBelum ada peringkat
- System 1: Bently NevadaDokumen4 halamanSystem 1: Bently Nevadanabil160874Belum ada peringkat
- 12 ElectrostaticsDokumen24 halaman12 ElectrostaticsTanvi ShahBelum ada peringkat