Anda mungkin juga menyukai
- Neural Based Tabu Search Method For Solving Unit Commitment Problem With Cooling-Banking ConstraintsDokumen18 halamanNeural Based Tabu Search Method For Solving Unit Commitment Problem With Cooling-Banking ConstraintsJaime Carrasco AguadoBelum ada peringkat
- Combined Use of Genetic Algorithm and Gradient Optimization Methods For Unit Commitment ResolutionDokumen15 halamanCombined Use of Genetic Algorithm and Gradient Optimization Methods For Unit Commitment ResolutionSahbi MarrouchiBelum ada peringkat
- ITS Algorithm Reduces Emission Dispatch CostDokumen5 halamanITS Algorithm Reduces Emission Dispatch CostMohandRahimBelum ada peringkat
- Unit Commitment Solution MethodsDokumen6 halamanUnit Commitment Solution MethodsPatrick SmithBelum ada peringkat
- Capacitor Placement of Distribution Systems Using Particle Swarm Optimization ApproachesDokumen13 halamanCapacitor Placement of Distribution Systems Using Particle Swarm Optimization ApproachesRezy Achazia Defianty BrcBelum ada peringkat
- An Improved PSO Technique For Short-Term Optimal Hydrothermal SchedulingDokumen7 halamanAn Improved PSO Technique For Short-Term Optimal Hydrothermal SchedulingAjit Kumar BarisalBelum ada peringkat
- Particle Optimisation Dispatch Cost Function: Swarm For Economic With Cubic FuelDokumen4 halamanParticle Optimisation Dispatch Cost Function: Swarm For Economic With Cubic FuelPavan KumarBelum ada peringkat
- A Cross Entropy-Genetic Algorithm For M-Machines No-Wait Job - ShopScheduling ProblemDokumen11 halamanA Cross Entropy-Genetic Algorithm For M-Machines No-Wait Job - ShopScheduling ProblemFrancisco Javier Gonzalez MolinaBelum ada peringkat
- In the simplest case, an optimization problem consists of maximizing or minimizing a real function by systematically choosing input values from within an allowed set and computing the value of the function. The generalization of optimization theory and techniques to other formulations comprises a large area of applied mathematics. More generally, optimization includes finding "best available" values of some objective function given a defined domain (or a set of constraints), including a variety of different types of objective functions and different types of domains.Dokumen7 halamanIn the simplest case, an optimization problem consists of maximizing or minimizing a real function by systematically choosing input values from within an allowed set and computing the value of the function. The generalization of optimization theory and techniques to other formulations comprises a large area of applied mathematics. More generally, optimization includes finding "best available" values of some objective function given a defined domain (or a set of constraints), including a variety of different types of objective functions and different types of domains.abhywaBelum ada peringkat
- Nav PreetDokumen7 halamanNav PreetER Publications, IndiaBelum ada peringkat
- 10 1 1 456 3557 PDFDokumen9 halaman10 1 1 456 3557 PDFNawar HamoudBelum ada peringkat
- Mathematical Modelling of Engineering Problems: Received: 30 November 2021 Accepted: 9 June 2022Dokumen9 halamanMathematical Modelling of Engineering Problems: Received: 30 November 2021 Accepted: 9 June 2022Engr Shahzaib ShahBelum ada peringkat
- Proceedings of the World Congress on Engineering and Computer Science 2019Dokumen6 halamanProceedings of the World Congress on Engineering and Computer Science 2019Purushottam SethyBelum ada peringkat
- Multi-Objective Design of Advanced Power Distribution Networks Using Restrictedpopulation-Based Multi-Objective Seekeroptimisation-Algorithm and Fuzzy-OperatorDokumen21 halamanMulti-Objective Design of Advanced Power Distribution Networks Using Restrictedpopulation-Based Multi-Objective Seekeroptimisation-Algorithm and Fuzzy-OperatorApikShafieeBelum ada peringkat
- Hydropower Optimization Using Deep Learning: (Ole - Granmo, Jivitesh - Sharma) @uia - NoDokumen13 halamanHydropower Optimization Using Deep Learning: (Ole - Granmo, Jivitesh - Sharma) @uia - Nojorge jorgeBelum ada peringkat
- Energy Efficient Task Scheduling For Real-Time Embedded SystemsDokumen15 halamanEnergy Efficient Task Scheduling For Real-Time Embedded SystemsMasoud IbrahimBelum ada peringkat
- Application: Power System OperationDokumen1 halamanApplication: Power System Operationeisuhlaing8Belum ada peringkat
- Constrained Dynamic Economic Dispatch Solution Using Particle Swarm OptimizationDokumen6 halamanConstrained Dynamic Economic Dispatch Solution Using Particle Swarm OptimizationChiko KheruBelum ada peringkat
- Optimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationDokumen12 halamanOptimal Placement of Multi-Distributed Generation Units Including Different Load Models Using Particle Swarm OptimisationAhmed WestministerBelum ada peringkat
- A Collaborative Iterated Greedy Algorithm With Reinforcement Learning for Energy-Aware Distributed Blocking Flow-shop SchedulingDokumen23 halamanA Collaborative Iterated Greedy Algorithm With Reinforcement Learning for Energy-Aware Distributed Blocking Flow-shop SchedulingAyoub OuhadiBelum ada peringkat
- Environmental/economic Power Dispatch Using A Fuzzified Multi-Objective Particle Swarm Optimization AlgorithmDokumen11 halamanEnvironmental/economic Power Dispatch Using A Fuzzified Multi-Objective Particle Swarm Optimization AlgorithmSivasubramani ShanmugaveluBelum ada peringkat
- A Modified Particle Swarm Technique For Distribution Systems ReconfigurationDokumen9 halamanA Modified Particle Swarm Technique For Distribution Systems ReconfigurationDiego MendezBelum ada peringkat
- Simulated Annealing Evolutionary Programming Approach Hydro-Thermal Unit CommitmentDokumen8 halamanSimulated Annealing Evolutionary Programming Approach Hydro-Thermal Unit CommitmentSalman ZafarBelum ada peringkat
- Research Article: Sizing A Hybrid Renewable Energy System by A Coevolutionary Multiobjective Optimization AlgorithmDokumen9 halamanResearch Article: Sizing A Hybrid Renewable Energy System by A Coevolutionary Multiobjective Optimization AlgorithmfbhkeBelum ada peringkat
- TMP 3135Dokumen13 halamanTMP 3135FrontiersBelum ada peringkat
- Generator SchedulingDokumen16 halamanGenerator SchedulingAbdulmalik Yusuf ZangoBelum ada peringkat
- Hydro-Thermal Generation Scheduling Using Integrated Gravitational Search Algorithm and Predator-Prey Optimization TechniqueDokumen20 halamanHydro-Thermal Generation Scheduling Using Integrated Gravitational Search Algorithm and Predator-Prey Optimization Techniquehassan499Belum ada peringkat
- Applied Sciences: Multi-Objective Electric Vehicles Scheduling Using Elitist Non-Dominated Sorting Genetic AlgorithmDokumen18 halamanApplied Sciences: Multi-Objective Electric Vehicles Scheduling Using Elitist Non-Dominated Sorting Genetic AlgorithmLIEW HUI FANG UNIMAPBelum ada peringkat
- A Literature Review of Recent Advances in Optimal Power FlowDokumen5 halamanA Literature Review of Recent Advances in Optimal Power FlowInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- A Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemDokumen14 halamanA Genetic Algorithm Approach For Solving Ac-Dc Optimal Power Flow ProblemJoe RanteBelum ada peringkat
- JOAPE - Volume 11 - Issue 2 - Pages 130-143 1Dokumen14 halamanJOAPE - Volume 11 - Issue 2 - Pages 130-143 1Venkatesh PeruthambiBelum ada peringkat
- Thesis On Economic Load Dispatch Using Genetic AlgorithmDokumen6 halamanThesis On Economic Load Dispatch Using Genetic Algorithmambervoisineanchorage100% (1)
- A Simulated Annealing Method To Cover Dynamic Load Balancing in Grid EnvironmentDokumen10 halamanA Simulated Annealing Method To Cover Dynamic Load Balancing in Grid EnvironmentMauricio PalettaBelum ada peringkat
- ARPN JournalDokumen12 halamanARPN JournalbaalaajeeBelum ada peringkat
- Power Systems Generation Scheduling and Optimization Using Fuzzy Logic TechniquesDokumen8 halamanPower Systems Generation Scheduling and Optimization Using Fuzzy Logic TechniquesInternational Journal of computational Engineering research (IJCER)Belum ada peringkat
- Expert Systems With Applications: Ruey-Maw ChenDokumen10 halamanExpert Systems With Applications: Ruey-Maw ChenJuan Sebastián Poveda GulfoBelum ada peringkat
- Methodological Priority List (MPL) For Unit Commitment ProblemDokumen6 halamanMethodological Priority List (MPL) For Unit Commitment ProblemArunPandiyanBelum ada peringkat
- Tezis EngDokumen12 halamanTezis EngiazcuzcBelum ada peringkat
- Chapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsDokumen14 halamanChapter - 1: Another Problem During The Time of Optimizing Any Objective FunctionsHossein HosseinBelum ada peringkat
- Optimal Power Flow Using Genetic AlgorithmDokumen6 halamanOptimal Power Flow Using Genetic AlgorithminesBelum ada peringkat
- HTSDEIJEPESJuly 2011Dokumen7 halamanHTSDEIJEPESJuly 2011Sujoy DasBelum ada peringkat
- UGC - 10 - Leela and AyaniDokumen11 halamanUGC - 10 - Leela and AyaniVIKRAM KUMARBelum ada peringkat
- Long-Term Maintenance Scheduling for Power PlantsDokumen10 halamanLong-Term Maintenance Scheduling for Power PlantsFarhad BahramiBelum ada peringkat
- Research Article: A Hybrid Differential Evolution and Tree Search Algorithm For The Job Shop Scheduling ProblemDokumen20 halamanResearch Article: A Hybrid Differential Evolution and Tree Search Algorithm For The Job Shop Scheduling ProblemDaniel WyczolkowskiBelum ada peringkat
- Optimal Generation Scheduling Based On AHP ANPDokumen5 halamanOptimal Generation Scheduling Based On AHP ANPvcoolfoxBelum ada peringkat
- Ajit Epes3Dokumen10 halamanAjit Epes3Ajit Kumar BarisalBelum ada peringkat
- B2 1 PDFDokumen10 halamanB2 1 PDFKiranBelum ada peringkat
- Adaptive Evolutionary Approach Solves Short-Term Electrical Generation SchedulingDokumen15 halamanAdaptive Evolutionary Approach Solves Short-Term Electrical Generation SchedulingSantiago CabreraBelum ada peringkat
- Transaction HTS2012Dokumen11 halamanTransaction HTS2012Sujoy DasBelum ada peringkat
- Multiple Objective Particle Swarm Optimization Technique For Economic Load DispatchDokumen8 halamanMultiple Objective Particle Swarm Optimization Technique For Economic Load DispatchbaalaajeeBelum ada peringkat
- Maintenance Scheduling of Generating Units in Electric Power SystemDokumen7 halamanMaintenance Scheduling of Generating Units in Electric Power SystemGirish MakwanaBelum ada peringkat
- Optimization Methods and Algorithms For Solving of HydroThermal Scheduling Problems.Dokumen8 halamanOptimization Methods and Algorithms For Solving of HydroThermal Scheduling Problems.Sujoy DasBelum ada peringkat
- 1 s2.0 S266679242100055X MainDokumen19 halaman1 s2.0 S266679242100055X MainBernard EeBelum ada peringkat
- An Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling ProblemDokumen13 halamanAn Improved Discrete Migrating Birds Optimization Algorithm For The No-Wait Flow Shop Scheduling Problemzrdasma01Belum ada peringkat
- DEED IntroDokumen10 halamanDEED IntroVeerasundaram MBelum ada peringkat
- A Review For Scheduling Algorithm in Hard Real Time System in DVS PlatformDokumen3 halamanA Review For Scheduling Algorithm in Hard Real Time System in DVS PlatformerpublicationBelum ada peringkat
- Genetic Algorithms Short Term Unit CommitmentDokumen14 halamanGenetic Algorithms Short Term Unit CommitmentSaheem ZafarBelum ada peringkat
- Analog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsDokumen12 halamanAnalog Circuit Optimization System Based On Hybrid Evolutionary AlgorithmsashishmanyanBelum ada peringkat
- Cloud Computing for Engineering ApplicationsDari EverandCloud Computing for Engineering ApplicationsBelum ada peringkat
- Computational Methods for Process SimulationDari EverandComputational Methods for Process SimulationPenilaian: 3 dari 5 bintang3/5 (1)
- Amar Ami - Uttom Kumar (Amarboi - Com)Dokumen263 halamanAmar Ami - Uttom Kumar (Amarboi - Com)avishekkgec0% (1)
- Nhpcrecruit English Scripts RecruitApDokumen1 halamanNhpcrecruit English Scripts RecruitApavishekkgecBelum ada peringkat
- Gate 2014 SolutionsDokumen25 halamanGate 2014 SolutionsNaim Maktumbi NesaragiBelum ada peringkat
- Dynamicprogramming 090902132828 Phpapp01Dokumen12 halamanDynamicprogramming 090902132828 Phpapp01avishekkgecBelum ada peringkat
- General KnowlwdgeDokumen115 halamanGeneral KnowlwdgeMUDASSAR IDRIS98% (44)
- KS Swarup - Unit CommitmentDokumen9 halamanKS Swarup - Unit CommitmentavishekkgecBelum ada peringkat
- Bengali Indrajal Comics Release No. 1 - V20N01 - Saitaner Swarga Part I Scanned For You by JharagramdevilDokumen29 halamanBengali Indrajal Comics Release No. 1 - V20N01 - Saitaner Swarga Part I Scanned For You by Jharagramdevilbinoy_ju07100% (2)
- Top 5 IT Candidates by CGPADokumen2 halamanTop 5 IT Candidates by CGPAavishekkgecBelum ada peringkat
- Land 16x16 1stimage Medium LandslideDokumen1 halamanLand 16x16 1stimage Medium LandslideavishekkgecBelum ada peringkat
- SRL No Image Image BlockDokumen37 halamanSRL No Image Image BlockavishekkgecBelum ada peringkat
- Akrur Songbad by Bani Basu PDFDokumen22 halamanAkrur Songbad by Bani Basu PDFavishekkgecBelum ada peringkat
- Effective Factors@RippletDokumen3 halamanEffective Factors@RippletavishekkgecBelum ada peringkat
- SRL No Contrast Homogeneity Energy Correlation Entropy TEP KurtosisDokumen6 halamanSRL No Contrast Homogeneity Energy Correlation Entropy TEP KurtosisavishekkgecBelum ada peringkat
- Data Set Fian L Ripple TDokumen6 halamanData Set Fian L Ripple TavishekkgecBelum ada peringkat
- Land 16X16 1stimageDokumen42 halamanLand 16X16 1stimageavishekkgecBelum ada peringkat
- Kmeans Analysis@CosineDokumen99 halamanKmeans Analysis@CosineavishekkgecBelum ada peringkat
- SRL No Image Image BlockDokumen37 halamanSRL No Image Image BlockavishekkgecBelum ada peringkat
- Fuzzycmeans@Full QualityDokumen12 halamanFuzzycmeans@Full QualityavishekkgecBelum ada peringkat
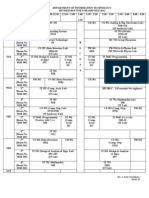
- IT Routine Odd Sem 25-07-2013Dokumen2 halamanIT Routine Odd Sem 25-07-2013avishekkgecBelum ada peringkat
- Classification of Landslide Using Fuzzy SystemsDokumen2 halamanClassification of Landslide Using Fuzzy SystemsavishekkgecBelum ada peringkat
- Time-Probabilistic Evaluation of Seismically Induced Landslide Hazard in IrpiniaDokumen14 halamanTime-Probabilistic Evaluation of Seismically Induced Landslide Hazard in IrpiniaavishekkgecBelum ada peringkat
- 1Dokumen2 halaman1avishekkgecBelum ada peringkat
- Pi FinalDokumen5 halamanPi FinalavishekkgecBelum ada peringkat
- Image Recognition Using Neural NetworksDokumen10 halamanImage Recognition Using Neural NetworksavishekkgecBelum ada peringkat
- Kmeans Analysis@CosineDokumen99 halamanKmeans Analysis@CosineavishekkgecBelum ada peringkat
- Fuzzycmeans@Full QualityDokumen12 halamanFuzzycmeans@Full QualityavishekkgecBelum ada peringkat
- PassportApplicationForm Main English V1.0Dokumen1 halamanPassportApplicationForm Main English V1.0avishekkgecBelum ada peringkat
- BulbulDokumen2 halamanBulbulavishekkgecBelum ada peringkat
- PassportApplicationForm Main English V1.0Dokumen1 halamanPassportApplicationForm Main English V1.0avishekkgecBelum ada peringkat
- A Seminar Report On: Submitted By-1. 2. 3. 4. 5. 6. 7. 8Dokumen2 halamanA Seminar Report On: Submitted By-1. 2. 3. 4. 5. 6. 7. 8avishekkgecBelum ada peringkat
- 21EI44 - Linear Control Systems - SyllabusDokumen4 halaman21EI44 - Linear Control Systems - Syllabuskrushnasamy subramaniyanBelum ada peringkat
- Current Status of Fuzzy System Applications in Power SystemsDokumen6 halamanCurrent Status of Fuzzy System Applications in Power SystemsAndres ZuñigaBelum ada peringkat
- Profit HRDokumen369 halamanProfit HRseminarskiiBelum ada peringkat
- Pilz Pss Programmable Safety Controller PDFDokumen74 halamanPilz Pss Programmable Safety Controller PDFClub Bal de TenaBelum ada peringkat
- State SpaceDokumen4 halamanState SpaceHai NguyenBelum ada peringkat
- Introduction To SynergyDokumen9 halamanIntroduction To SynergyRafael BabianoBelum ada peringkat
- System Analysis and DesignDokumen68 halamanSystem Analysis and DesignClarisse RegaladoBelum ada peringkat
- CIM Systems for Manufacturing Design, Planning & ControlDokumen1 halamanCIM Systems for Manufacturing Design, Planning & ControlJeganBelum ada peringkat
- Coursework of Signals and Systems: Moh. Kamalul Wafi December 6, 2018Dokumen2 halamanCoursework of Signals and Systems: Moh. Kamalul Wafi December 6, 2018kartiniBelum ada peringkat
- SumitDokumen10 halamanSumitSumit LunaychBelum ada peringkat
- Beyond ERP: Towards Intelligent Manufacturing Planning and ControlDokumen49 halamanBeyond ERP: Towards Intelligent Manufacturing Planning and ControldedikiBelum ada peringkat
- Robotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationDokumen15 halamanRobotics: Trajectory Planning and Tracking Control of A Differential-Drive Mobile Robot in A Picture Drawing ApplicationMinh CaoBelum ada peringkat
- Chapter 5 Linear ProgrammingDokumen9 halamanChapter 5 Linear ProgrammingBiraj GhimireBelum ada peringkat
- Angel charities IT module question bankDokumen1 halamanAngel charities IT module question bankImran JamadarBelum ada peringkat
- Ch.1Dokumen29 halamanCh.1ackmxqz100% (3)
- Review and Classification of Control Systems in Grid Tied InvertersDokumen10 halamanReview and Classification of Control Systems in Grid Tied InvertersmanBelum ada peringkat
- ComplexityDokumen19 halamanComplexityRejoy VMBelum ada peringkat
- Finite Impulse ResponseDokumen6 halamanFinite Impulse ResponseYoga Putra PratamaBelum ada peringkat
- ENERGY ANALYSIS OF CLOSED SYSTEMSDokumen3 halamanENERGY ANALYSIS OF CLOSED SYSTEMSAnonymous mXicTi8hBBelum ada peringkat
- Control Systems PDFDokumen24 halamanControl Systems PDFlum_78Belum ada peringkat
- 11 Chemistry Notes ch06 Thermodynamics PDFDokumen4 halaman11 Chemistry Notes ch06 Thermodynamics PDFRangbaaz DA FIRENZEBelum ada peringkat
- MEEN655 Syllabus Sp16 PDFDokumen5 halamanMEEN655 Syllabus Sp16 PDFAndrea SpencerBelum ada peringkat
- Transient and Steady-State Analyses of First-Order SystemsDokumen39 halamanTransient and Steady-State Analyses of First-Order SystemsAhmed SaidBelum ada peringkat
- SICE03 Conference Tutorial on Smith Predictor & IMC ControlDokumen5 halamanSICE03 Conference Tutorial on Smith Predictor & IMC Controldsshin_psBelum ada peringkat
- Quality Function DeploymentDokumen54 halamanQuality Function DeploymentAhmad dérouicheBelum ada peringkat
- Ecs-602 Software Engineering 2013-14Dokumen4 halamanEcs-602 Software Engineering 2013-14Abhinav DwivediBelum ada peringkat
- Object Oriented Analysis and Design: Applying UML and Patterns - Craig LarmanDokumen17 halamanObject Oriented Analysis and Design: Applying UML and Patterns - Craig LarmanInnoxentDollBelum ada peringkat
- Case Study MLDokumen3 halamanCase Study MLsaurabh tiwariBelum ada peringkat
- Devops RecordDokumen109 halamanDevops RecordPriya NeelamBelum ada peringkat
- FrontsimDokumen2 halamanFrontsimALEXANDER100% (1)