Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Fed STD 209eDokumen55 halamanFed STD 209eJeremy ShepherdBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Energies: Blockchain in Energy E Applications and BenefitsDokumen14 halamanEnergies: Blockchain in Energy E Applications and BenefitsAlaa M El-adlBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Chapter-3 Electrical Protection System PDFDokumen101 halamanChapter-3 Electrical Protection System PDFBalachandra MallyaBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Ejaet 2 3 84 89Dokumen6 halamanEjaet 2 3 84 89Alaa M El-adlBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- 49 - EE449T - Electric Power in ShipsDokumen3 halaman49 - EE449T - Electric Power in ShipsAlaa M El-adlBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Full Page PhotoDokumen1 halamanFull Page PhotoAlaa M El-adlBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Blockchain Meets EnergyDokumen45 halamanBlockchain Meets EnergyAnonymous TUwCKWBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Engineering Software Bundle for Plumbing, HVAC, Fire Protection & MoreDokumen20 halamanEngineering Software Bundle for Plumbing, HVAC, Fire Protection & MoreAlaa M El-adlBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Es710 D00109 01 D XxenDokumen8 halamanEs710 D00109 01 D XxenAlaa M El-adlBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Abb AtsDokumen156 halamanAbb AtsmherbakBelum ada peringkat
- Fuji ContactorsDokumen152 halamanFuji ContactorsAlaa M El-adl0% (1)
- Abb AtsDokumen156 halamanAbb AtsmherbakBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- CircutorDokumen97 halamanCircutorAlaa M El-adlBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- CIRCUTOR: Leaders in electrical energy efficiency solutionsDokumen16 halamanCIRCUTOR: Leaders in electrical energy efficiency solutionsAlaa M El-adlBelum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- PLC Adv FuncDokumen28 halamanPLC Adv FuncJobin VargheseBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Final Presentation 2011Dokumen52 halamanFinal Presentation 2011Alaa M El-adlBelum ada peringkat
- Motor Sangkar Tupai - MesinDokumen24 halamanMotor Sangkar Tupai - MesinKuri-kuri DorayakiBelum ada peringkat
- IESLuxLevel 1Dokumen12 halamanIESLuxLevel 1tr_nisitBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- ECM and EDMDokumen23 halamanECM and EDMVinay KumarBelum ada peringkat
- Electrical Transformers and Rotating Machines 4th Edition Herman Solutions ManualDokumen2 halamanElectrical Transformers and Rotating Machines 4th Edition Herman Solutions Manuala2264888170% (1)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- CT100B System User ManualDokumen22 halamanCT100B System User ManualJose RojasBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- LC 22 Le 320Dokumen367 halamanLC 22 Le 320Yanto SaeBelum ada peringkat
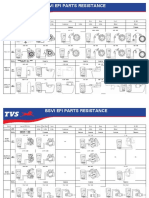
- EFI ResistanceDokumen3 halamanEFI ResistanceMuni Muniyappan33% (3)
- Catalogo Numatics 554SA400K046T30Dokumen25 halamanCatalogo Numatics 554SA400K046T30Jair Mata Cuenca100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Bulb AssignmentDokumen2 halamanBulb AssignmentJamie McGregorBelum ada peringkat
- 1 - Introduction To Microelectronics LMSverDokumen74 halaman1 - Introduction To Microelectronics LMSverroxy8marie8chanBelum ada peringkat
- Certificado Inversor Sunny Boy 6.0Dokumen1 halamanCertificado Inversor Sunny Boy 6.0PoloRodriguezBelum ada peringkat
- Computer 8 Fourth QuarterDokumen8 halamanComputer 8 Fourth QuarterReygina Mae Sibayan PalaganasBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Jevi - Junction Boxes For Immersion Heaters - Technical Data SheetDokumen2 halamanJevi - Junction Boxes For Immersion Heaters - Technical Data SheetHasibKaabiBelum ada peringkat
- Global Positioning System Fill in The Blanks Unit I: IntroductionDokumen15 halamanGlobal Positioning System Fill in The Blanks Unit I: IntroductionHoney Durga Tiwari100% (1)
- LPDDR 4Dokumen1 halamanLPDDR 4SamBelum ada peringkat
- Physical Layer ProceduresDokumen145 halamanPhysical Layer ProceduresTanzyy.2018Belum ada peringkat
- DatasheetDokumen56 halamanDatasheetrajkumarmalathiBelum ada peringkat
- User Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faDokumen84 halamanUser Manual Readwell Touch Elisa Plate Analyser Ve - 5ac1cece1723dd45806d81faCarlos ReisBelum ada peringkat
- Ds SSG 8 Baur En-GbDokumen2 halamanDs SSG 8 Baur En-Gbrupesh kumarBelum ada peringkat
- JVC Car Stereo KD-S595 Service ManualDokumen42 halamanJVC Car Stereo KD-S595 Service ManualAnonymous j5apk2AumBelum ada peringkat
- s66698 138URecPrtrDokumen36 halamans66698 138URecPrtrPeter SamuelBelum ada peringkat
- Cat Digital Voltage Regulator Manual: Read/DownloadDokumen2 halamanCat Digital Voltage Regulator Manual: Read/DownloadBrian Jr Ruiz Alegre0% (1)
- Fuses Del PicDokumen7 halamanFuses Del PicCarlos RodríguezBelum ada peringkat
- CEPT Novice 1Dokumen26 halamanCEPT Novice 1Ster RncBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- DataSheet SRM50-HFA0-K21 1037071 enDokumen6 halamanDataSheet SRM50-HFA0-K21 1037071 entrinoBelum ada peringkat
- CA902005E (Web) Acti9 Vigi Ic60Dokumen22 halamanCA902005E (Web) Acti9 Vigi Ic60Rino NainggolanBelum ada peringkat
- Introduction to PLC Programming LanguagesDokumen17 halamanIntroduction to PLC Programming LanguagesBandi vennelaBelum ada peringkat
- Positive IsolationDokumen10 halamanPositive IsolationArunava Basak0% (1)
- Datasheet 3L2Dokumen6 halamanDatasheet 3L2juan carlos diaz cardozoBelum ada peringkat
- AC ScrollDokumen12 halamanAC ScrollKamalMuralikumarBelum ada peringkat
- Instantaneous 4 Contact RelaysDokumen3 halamanInstantaneous 4 Contact RelaysSetecma IndustrialBelum ada peringkat
- 8 isolated DC output module with optical isolation and diode protectionDokumen1 halaman8 isolated DC output module with optical isolation and diode protectionDelshad DuhokiBelum ada peringkat
- Einstein's Fridge: How the Difference Between Hot and Cold Explains the UniverseDari EverandEinstein's Fridge: How the Difference Between Hot and Cold Explains the UniversePenilaian: 4.5 dari 5 bintang4.5/5 (50)
- Hyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionDari EverandHyperspace: A Scientific Odyssey Through Parallel Universes, Time Warps, and the 10th DimensionPenilaian: 4.5 dari 5 bintang4.5/5 (3)
- Practical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsDari EverandPractical Guides to Testing and Commissioning of Mechanical, Electrical and Plumbing (Mep) InstallationsPenilaian: 3.5 dari 5 bintang3.5/5 (3)