Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Multi Phase InductionDokumen11 halamanMulti Phase InductionsathishBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Valliammai Engineering College Question Bank on Electrical Drives and ControlDokumen13 halamanValliammai Engineering College Question Bank on Electrical Drives and Controlsathish0% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Ijesit201405 31Dokumen12 halamanIjesit201405 31sathishBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- PowSysEnggDokumen38 halamanPowSysEnggvinodlifeBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- BEEE CIAT TEST Design of Transformers and Induction MotorsDokumen4 halamanBEEE CIAT TEST Design of Transformers and Induction MotorssathishBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Anna University PG Regulations 2013Dokumen16 halamanAnna University PG Regulations 2013tskmeBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Lic Two Marks EditedDokumen43 halamanLic Two Marks EditedsathishBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- EE6351-Electrical Drives and ControlDokumen10 halamanEE6351-Electrical Drives and ControlsathishBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Unit1 EditedDokumen32 halamanUnit1 EditedsathishBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Cover LetterDokumen2 halamanCover LettersathishBelum ada peringkat
- Art of LivingDokumen155 halamanArt of Livingsathish50% (2)
- ArticleDokumen2 halamanArticlesathishBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- List of Deemed Universities: SR - No. WebsiteDokumen6 halamanList of Deemed Universities: SR - No. WebsitesathishBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Realization of An Asynchronous Six-Phase Induction Motor Drive Test-RigDokumen5 halamanRealization of An Asynchronous Six-Phase Induction Motor Drive Test-Rigsathish100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- A Review of Induction Motors Signature Analysis As A Medium For Faults DetectionDokumen10 halamanA Review of Induction Motors Signature Analysis As A Medium For Faults DetectiongasdeswerBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Modeling and Analysis of A Hybrid Solar-Dish Brayton Engine: Sara Ghaem SigarchianDokumen78 halamanModeling and Analysis of A Hybrid Solar-Dish Brayton Engine: Sara Ghaem SigarchiansathishBelum ada peringkat
- Practical Induction 01Dokumen5 halamanPractical Induction 01sathishBelum ada peringkat
- Emergency PowerDokumen51 halamanEmergency PowersathishBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Thermal Model Induction MotorDokumen17 halamanThermal Model Induction MotorTaylor100% (1)
- 1 PBDokumen7 halaman1 PBsathishBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Trends of Power Electronics On Renewable Energy SystemDokumen8 halamanTrends of Power Electronics On Renewable Energy SystemsathishBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- 1 PBDokumen7 halaman1 PBsathishBelum ada peringkat
- Solar CoolDokumen10 halamanSolar CoolBhanu Shree GowdaBelum ada peringkat
- Single-Switch High Step-Up Converters With Built-In Transformer Voltage Multiplier CellDokumen11 halamanSingle-Switch High Step-Up Converters With Built-In Transformer Voltage Multiplier CellsathishBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Early Warning SystemDokumen12 halamanEarly Warning SystemsathishBelum ada peringkat
- Work Shop Course Brochure-Hybrid Electric VehiclesDokumen2 halamanWork Shop Course Brochure-Hybrid Electric VehiclessathishBelum ada peringkat
- HVDC IN Future Transmission System: Reasons For Ac Generation and TransmissionsDokumen6 halamanHVDC IN Future Transmission System: Reasons For Ac Generation and TransmissionssathishBelum ada peringkat
- Modelling BLDC Motor Drive Using Sensored and Sensorless ControlDokumen10 halamanModelling BLDC Motor Drive Using Sensored and Sensorless ControlvishiwizardBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Proposal Guidelinesproposal - Guidelines PDFDokumen5 halamanProposal Guidelinesproposal - Guidelines PDFKilari UmeshBelum ada peringkat
- GSM Frequency Bands Table ExplainedDokumen2 halamanGSM Frequency Bands Table Explainedamits_aumBelum ada peringkat
- FD-X Series: IO-Link Instruction ManualDokumen8 halamanFD-X Series: IO-Link Instruction ManualJenny Gonzalo MadrigalBelum ada peringkat
- Dda010 Ice2qr0665Dokumen21 halamanDda010 Ice2qr0665bassel alBelum ada peringkat
- TIC106DDokumen1 halamanTIC106DMauricio BurgosBelum ada peringkat
- Engineering PHYSICS NOTES VTUDokumen109 halamanEngineering PHYSICS NOTES VTUAkshay AnandBelum ada peringkat
- Introduction To Arduino MicrocontrollersDokumen32 halamanIntroduction To Arduino MicrocontrollerstopherskiBelum ada peringkat
- Vertx SeriesDokumen24 halamanVertx SeriesGert Baez CuevasBelum ada peringkat
- Global Positioning System Fill in The Blanks Unit I: IntroductionDokumen15 halamanGlobal Positioning System Fill in The Blanks Unit I: IntroductionHoney Durga Tiwari100% (1)
- Timers Din Rail Mount 17 5 MM 1 Relay 8a Mcr1 Part Number 88827135Dokumen3 halamanTimers Din Rail Mount 17 5 MM 1 Relay 8a Mcr1 Part Number 88827135Rodrigo Milla IrarrazabalBelum ada peringkat
- J449 NecDokumen8 halamanJ449 Necnaude visserBelum ada peringkat
- Actuadores Electrohidraulicos PDFDokumen6 halamanActuadores Electrohidraulicos PDFJorge ArimanaBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Addis Ababa University Addis Ababa Institute of TechnologyDokumen56 halamanAddis Ababa University Addis Ababa Institute of TechnologyFìrœ Lōv MånBelum ada peringkat
- D 8806 Paper Iii PDFDokumen32 halamanD 8806 Paper Iii PDFAryama MandalBelum ada peringkat
- Models - Acdc.capacitor DCDokumen16 halamanModels - Acdc.capacitor DCFrancisco Rafael CerónBelum ada peringkat
- NRS048 1Dokumen14 halamanNRS048 1rendanin100% (1)
- FactSheet TPS Controllers ORION enDokumen2 halamanFactSheet TPS Controllers ORION enlacda83Belum ada peringkat
- Numerical Busbar Protection: Technical Data SheetDokumen24 halamanNumerical Busbar Protection: Technical Data SheetamitdhamijaBelum ada peringkat
- S Cubed DatasheetDokumen2 halamanS Cubed DatasheetGulf JobzBelum ada peringkat
- Application Note - The Effects of Adjusting V/HZ Patterns On Torque Production For Variable Torque ApplicationsDokumen8 halamanApplication Note - The Effects of Adjusting V/HZ Patterns On Torque Production For Variable Torque ApplicationsQuality Team qc2.chennaiBelum ada peringkat
- Lab 5 Series and Parallel CircuitsDokumen3 halamanLab 5 Series and Parallel CircuitsJimmyPowellBelum ada peringkat
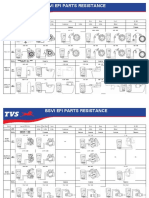
- EFI ResistanceDokumen3 halamanEFI ResistanceMuni Muniyappan33% (3)
- VI Lect - Notes#3 Btech Vii Sem Aug Dec2022Dokumen164 halamanVI Lect - Notes#3 Btech Vii Sem Aug Dec2022NAAZBelum ada peringkat
- Nirs DS2500 Analyzer: ManualDokumen54 halamanNirs DS2500 Analyzer: Manualedward tagarinoBelum ada peringkat
- Circuit BreakersDokumen64 halamanCircuit BreakersPhani Kumar100% (1)
- Star Delta Starter Selection ChartDokumen1 halamanStar Delta Starter Selection Chartphyo7799Belum ada peringkat
- ESIGDokumen670 halamanESIGalejandro calixtoBelum ada peringkat
- Dave Wilson: 2012 Texas Instruments Motor Control TrainingDokumen25 halamanDave Wilson: 2012 Texas Instruments Motor Control TrainingDongchoon GimBelum ada peringkat
- VB Instrument - Induction Motor Current Analysis - Support - CommtestDokumen5 halamanVB Instrument - Induction Motor Current Analysis - Support - CommtestaabejaroBelum ada peringkat
- SOP05-5002F Service Manual ProlyteDokumen41 halamanSOP05-5002F Service Manual ProlyteRogger Ruffini100% (1)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindDari EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindBelum ada peringkat
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureDari EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CulturePenilaian: 4.5 dari 5 bintang4.5/5 (2)
- Artificial Intelligence: From Medieval Robots to Neural NetworksDari EverandArtificial Intelligence: From Medieval Robots to Neural NetworksPenilaian: 4 dari 5 bintang4/5 (3)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceDari EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligencePenilaian: 5 dari 5 bintang5/5 (9)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessDari EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessBelum ada peringkat
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsDari EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsBelum ada peringkat