Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- EE2092 6 2011 Waveform AnalysisDokumen113 halamanEE2092 6 2011 Waveform AnalysisTharaka MethsaraBelum ada peringkat
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Laws of Motion Advanced Level Problems For IIT-JEEDokumen5 halamanLaws of Motion Advanced Level Problems For IIT-JEEEr. Vineet Loomba (IIT Roorkee)89% (9)
- SKF Certificate of OriginDokumen1 halamanSKF Certificate of OriginTharaka Methsara100% (4)
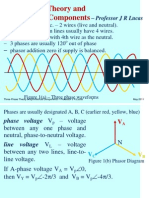
- Three Phase Theory and Symmetrical Components: - Professor J R LucasDokumen54 halamanThree Phase Theory and Symmetrical Components: - Professor J R LucasTharaka MethsaraBelum ada peringkat
- C12 Electromagnetic WavesDokumen48 halamanC12 Electromagnetic WavesRosemarie Cabanilla50% (2)
- Short CircuitDokumen33 halamanShort Circuitlusifadilah100% (1)
- Palm Oil Processing and CharacterisationDokumen17 halamanPalm Oil Processing and CharacterisationTharaka Methsara100% (1)
- BU Board Exam QuestionsDokumen5 halamanBU Board Exam QuestionsMaricarBarquezBelum ada peringkat
- POWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyDokumen26 halamanPOWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyAbhilash ReddyBelum ada peringkat
- Evaluating Design and Performance Characteristics of Fitness EquipmentDokumen9 halamanEvaluating Design and Performance Characteristics of Fitness EquipmentAhmad Zubair RasulyBelum ada peringkat
- Float Level TransmitterDokumen4 halamanFloat Level TransmitterTharaka MethsaraBelum ada peringkat
- 432ZX Brochure Final LowDokumen8 halaman432ZX Brochure Final LowTharaka MethsaraBelum ada peringkat
- Machine Screws: ISO Metric Machine Screws Are Limited To Four Different HeadDokumen4 halamanMachine Screws: ISO Metric Machine Screws Are Limited To Four Different HeadTharaka MethsaraBelum ada peringkat
- Paddle DryerDokumen10 halamanPaddle DryerTharaka MethsaraBelum ada peringkat
- Introduction For Controls 260217 - 2in1Dokumen23 halamanIntroduction For Controls 260217 - 2in1Tharaka MethsaraBelum ada peringkat
- Simplex MethodDokumen4 halamanSimplex MethodTharaka MethsaraBelum ada peringkat
- Business StatisticsDokumen138 halamanBusiness StatisticsTharaka MethsaraBelum ada peringkat
- Assignment ProblemsDokumen9 halamanAssignment ProblemsTharaka MethsaraBelum ada peringkat
- CEB Net Metering Manual - 3Dokumen15 halamanCEB Net Metering Manual - 3Tharaka Methsara100% (1)
- Micro Controller SinhalaDokumen1 halamanMicro Controller SinhalaTharaka Methsara100% (1)
- File ManagementDokumen67 halamanFile ManagementTharaka MethsaraBelum ada peringkat
- Electrical MeasurementsDokumen10 halamanElectrical MeasurementsTharaka MethsaraBelum ada peringkat
- Renewable Electricity-Generation Technologies: House of Commons Innovation, Universities, Science and Skills CommitteeDokumen77 halamanRenewable Electricity-Generation Technologies: House of Commons Innovation, Universities, Science and Skills CommitteeTharaka MethsaraBelum ada peringkat
- Power SystemsDokumen14 halamanPower SystemsTharaka MethsaraBelum ada peringkat
- ME1802 2011 - Lecture-1-Introduction To Manufacturing EngineeringDokumen64 halamanME1802 2011 - Lecture-1-Introduction To Manufacturing EngineeringTharaka MethsaraBelum ada peringkat
- Chapter 1 Det50063 - IntroductionDokumen12 halamanChapter 1 Det50063 - IntroductionFara FaraBelum ada peringkat
- Computation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodDokumen4 halamanComputation of Leakage Flux and Magnetic Force in Transformer by Using Field-Circuit Coupled Finite Element MethodmehdivinciBelum ada peringkat
- Network Theory - BASICS - : By: Mr. Vinod SalunkheDokumen17 halamanNetwork Theory - BASICS - : By: Mr. Vinod Salunkhevinod SALUNKHEBelum ada peringkat
- Chapter 25Dokumen25 halamanChapter 25Reparting Unit IE ClubBelum ada peringkat
- 1 - ForceDokumen42 halaman1 - ForceJessa YaunBelum ada peringkat
- Nelson Vectors 12 SupplementDokumen185 halamanNelson Vectors 12 Supplementrygoa100% (2)
- PROBLEMS - University Physics 2 - Homework 1 - Electric FieldDokumen3 halamanPROBLEMS - University Physics 2 - Homework 1 - Electric FieldNguyễn Hoàng ĐăngBelum ada peringkat
- Fig 5Dokumen1 halamanFig 5api-502619593Belum ada peringkat
- Fundamentals OF ElectricityDokumen37 halamanFundamentals OF ElectricityMarvin Sarmiento TalimonganBelum ada peringkat
- CH11 ProbsDokumen10 halamanCH11 Probser denice catamoraBelum ada peringkat
- Synchronous Generator Operating ChartDokumen4 halamanSynchronous Generator Operating Chartp41005679Belum ada peringkat
- Applied Design Codes On International Long-Span Bridge Projects in AsiaDokumen8 halamanApplied Design Codes On International Long-Span Bridge Projects in Asiaafzal taiBelum ada peringkat
- The Activity Aims:: Familiarization of The OscilloscopeDokumen40 halamanThe Activity Aims:: Familiarization of The Oscilloscopeangelo dedicatoria100% (1)
- Senr 1446 A 00001Dokumen12 halamanSenr 1446 A 00001Nicole SmithBelum ada peringkat
- Antenna Tutorials - Reflection Coefficient and VSWRDokumen5 halamanAntenna Tutorials - Reflection Coefficient and VSWREmilio EscalanteBelum ada peringkat
- LSMTRON Catalogue v1.1Dokumen17 halamanLSMTRON Catalogue v1.1duong nguyenBelum ada peringkat
- ADR219 CMDokumen133 halamanADR219 CMRajiv ChandranBelum ada peringkat
- 4140 MosfetDokumen19 halaman4140 MosfetVolkan YılmazBelum ada peringkat
- Conversion of AC Input Into DC OutputDokumen10 halamanConversion of AC Input Into DC OutputSehar KhanBelum ada peringkat
- Free Fall - Problems and SolutionsDokumen7 halamanFree Fall - Problems and SolutionsSanBelum ada peringkat
- User Manuals of Micro-Ohmmeter MOM200 PDFDokumen20 halamanUser Manuals of Micro-Ohmmeter MOM200 PDFPhước Khang NguyễnBelum ada peringkat
- Chapter 2. Mathematical MethodsDokumen17 halamanChapter 2. Mathematical Methodsdeep34Belum ada peringkat
- Diploma in Agriculture EngineeringDokumen11 halamanDiploma in Agriculture EngineeringTiffany Ivy Anak JonathanBelum ada peringkat
- PHYSICSDokumen1 halamanPHYSICSBarathraj D18Belum ada peringkat