Anda mungkin juga menyukai
- Extension Springs: Selecting An Extension SpringDokumen60 halamanExtension Springs: Selecting An Extension SpringjrklingBelum ada peringkat
- 10.mechanica..l SpringsDokumen149 halaman10.mechanica..l SpringsAekkasit SenaartBelum ada peringkat
- NutsDokumen49 halamanNutsIshant JaiswalBelum ada peringkat
- F= Π X Dt3 X Τk 8Xdmxk: Technical InformationDokumen6 halamanF= Π X Dt3 X Τk 8Xdmxk: Technical InformationaleaubrBelum ada peringkat
- Sales Rep Locator Call Us at 815-968-3000: Select State Request A QuoteDokumen8 halamanSales Rep Locator Call Us at 815-968-3000: Select State Request A QuoteJulio Cesar Aguilar CaceresBelum ada peringkat
- Spring DesignDokumen2 halamanSpring DesignPrabu ArBelum ada peringkat
- md-8 Spring DesignDokumen8 halamanmd-8 Spring DesignBharatiyulamBelum ada peringkat
- General Kinematics - UncoalerDokumen38 halamanGeneral Kinematics - UncoalerJogesh NarulaBelum ada peringkat
- Natural RubberDokumen7 halamanNatural RubberFrancis AdrianBelum ada peringkat
- Selecting Couplings For Large LoadsDokumen7 halamanSelecting Couplings For Large Loadsanup_nairBelum ada peringkat
- Basic of FastenersDokumen53 halamanBasic of FastenersKomal TagraBelum ada peringkat
- Hydraulic OilDokumen7 halamanHydraulic OilAdelina MaicanBelum ada peringkat
- Technical Data (Thai) 3Dokumen1 halamanTechnical Data (Thai) 3NatKThBelum ada peringkat
- Hydrodynamic Journal Bearings by MFDokumen72 halamanHydrodynamic Journal Bearings by MFTanweer Ahmed100% (1)
- Uebersicht Schalldaempfer 5,56 MMDokumen1 halamanUebersicht Schalldaempfer 5,56 MMSamuel VonlanthenBelum ada peringkat
- Wecall CatalogDokumen20 halamanWecall Catalogpdoherty100% (2)
- Evaluating The Microstructure of Graphite in Iron Castings: Standard Test Method ForDokumen13 halamanEvaluating The Microstructure of Graphite in Iron Castings: Standard Test Method Forraulpalma93Belum ada peringkat
- HighTens EN25Dokumen2 halamanHighTens EN25Annamali Thiayagarajan0% (1)
- Technical Data FN Evolys 762Dokumen1 halamanTechnical Data FN Evolys 762Zedney ZedneyBelum ada peringkat
- Disclosure To Promote The Right To InformationDokumen11 halamanDisclosure To Promote The Right To InformationAtendra SinghBelum ada peringkat
- Beretta Arx 160Dokumen9 halamanBeretta Arx 160Stefanos TzortzisBelum ada peringkat
- Rochi 2019 PDFDokumen26 halamanRochi 2019 PDFGautamBelum ada peringkat
- Application of Aerogels in Textile IndustryDokumen8 halamanApplication of Aerogels in Textile IndustrySanmedha AmbureBelum ada peringkat
- Spring ProofDokumen9 halamanSpring ProofthewallstreetBelum ada peringkat
- Concordia University: MECH 390 - Mechanical Engineering Design ProjectDokumen58 halamanConcordia University: MECH 390 - Mechanical Engineering Design ProjectAlexander Rueda OrduzBelum ada peringkat
- Wear ProtectionDokumen6 halamanWear ProtectionRafael CortezBelum ada peringkat
- O RingsDokumen6 halamanO RingsCuepattBelum ada peringkat
- Slurry Pump The KproDokumen11 halamanSlurry Pump The Kpro4lk0nBelum ada peringkat
- ValveDokumen136 halamanValveRAVI kayjayBelum ada peringkat
- Is 6051 1970Dokumen15 halamanIs 6051 1970harshal161987100% (1)
- How To Analyze Gear FailuresDokumen12 halamanHow To Analyze Gear FailuresOuld EulerBelum ada peringkat
- (17CrNiMo6) 4317 Case Hardening SteelDokumen3 halaman(17CrNiMo6) 4317 Case Hardening Steelazhar mohammedBelum ada peringkat
- Outotec - Seismic Design of Elevated Slurry Storage Tanks For As NZS 1170 (Rosart)Dokumen8 halamanOutotec - Seismic Design of Elevated Slurry Storage Tanks For As NZS 1170 (Rosart)Serguei DobrinBelum ada peringkat
- Spare Parts For Mechanical SealsDokumen21 halamanSpare Parts For Mechanical SealsmadairkifBelum ada peringkat
- Undetected Bearing Wear Leads To Catastrophic Compressor FailureDokumen5 halamanUndetected Bearing Wear Leads To Catastrophic Compressor FailureMuhammad ImranBelum ada peringkat
- Fit Selection BasicDokumen1 halamanFit Selection Basicapi-3848892100% (2)
- Review On Study of Jaw Crusher PDFDokumen4 halamanReview On Study of Jaw Crusher PDFRagab AbulmagdBelum ada peringkat
- Rolling Contact Bearings - DMEDokumen28 halamanRolling Contact Bearings - DMESumitBelum ada peringkat
- Ball Screw CalculatorDokumen60 halamanBall Screw Calculatorمنير بوزيدBelum ada peringkat
- Journal Bearings Practice PDFDokumen20 halamanJournal Bearings Practice PDFPrabhath KumaraBelum ada peringkat
- Centrifugal ForceDokumen6 halamanCentrifugal ForceJayDee ReynosoBelum ada peringkat
- FA25i FA5i FA5Ti Parts Information AirToolProDokumen48 halamanFA25i FA5i FA5Ti Parts Information AirToolProEslam Saeed100% (1)
- Friction and Wear of Ptfe Comp at Cry TempDokumen10 halamanFriction and Wear of Ptfe Comp at Cry Tempa100acomBelum ada peringkat
- A Study On Tribological & Statistical Investigation of PTFE, Tin Bronze and White MetalDokumen9 halamanA Study On Tribological & Statistical Investigation of PTFE, Tin Bronze and White MetalIJRASETPublicationsBelum ada peringkat
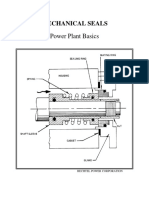
- Mechanical Seals: Power Plant BasicsDokumen26 halamanMechanical Seals: Power Plant BasicsService Port100% (1)
- 9 CirclipsDokumen48 halaman9 CirclipsmukeshkumarjBelum ada peringkat
- Flyer Rolling Bearing AnalysisDokumen4 halamanFlyer Rolling Bearing AnalysisBikash Ranjan SahooBelum ada peringkat
- Vibration Formula ScribDokumen2 halamanVibration Formula ScribiulianstoicaBelum ada peringkat
- Analysis of Spiral Power SpringDokumen4 halamanAnalysis of Spiral Power SpringMuhd IlhamBelum ada peringkat
- SKF Couplings Catalogue 6897 SKFDokumen72 halamanSKF Couplings Catalogue 6897 SKFAriel Linder Ureña MontenegroBelum ada peringkat
- Spring Design 101: Ace Wire Spring & Form Co., IncDokumen15 halamanSpring Design 101: Ace Wire Spring & Form Co., IncmshameliBelum ada peringkat
- Restrictors and Compensation of Hydrostatic Bearings - Rowe PDFDokumen7 halamanRestrictors and Compensation of Hydrostatic Bearings - Rowe PDFramaanan0% (2)
- DME Unit 5 Springs PDFDokumen51 halamanDME Unit 5 Springs PDFsachinroy8638Belum ada peringkat
- Springs: Source: Machine Design-An Integrated Approach by Robert L. Norton (2010)Dokumen25 halamanSprings: Source: Machine Design-An Integrated Approach by Robert L. Norton (2010)Rana AamirBelum ada peringkat
- Design of A Helical Compression Spring For Honda CityDokumen11 halamanDesign of A Helical Compression Spring For Honda CityZaryan IjazBelum ada peringkat
- Extension Springs Torsion Spring: Active Coils (N)Dokumen9 halamanExtension Springs Torsion Spring: Active Coils (N)Pidathala Raghu Vamsi ReddyBelum ada peringkat
- Mechanical SpringsDokumen33 halamanMechanical SpringsAhmedOMBelum ada peringkat
- Springs 2nd-TermDokumen10 halamanSprings 2nd-TermCarl John MantacBelum ada peringkat
- Spring 1Dokumen48 halamanSpring 1Owais Ahmad KhanBelum ada peringkat
- Refractory Engineering and Kiln Maintenance in Cement PlantsDokumen4 halamanRefractory Engineering and Kiln Maintenance in Cement Plantskikin312012Belum ada peringkat
- Using Equations and ParametersDokumen2 halamanUsing Equations and Parameterskikin312012Belum ada peringkat
- Design HandbookDokumen49 halamanDesign HandbookStas Zabarsky100% (1)
- Calculo de ResortesDokumen27 halamanCalculo de Resortesermayo15Belum ada peringkat
- Fundamentals of Mechanical DesignDokumen150 halamanFundamentals of Mechanical DesignMiguelDiazVBelum ada peringkat
- Pref - 2 - Grammar 1.2 - Revisión Del IntentoDokumen2 halamanPref - 2 - Grammar 1.2 - Revisión Del IntentoJuan M. Suarez ArevaloBelum ada peringkat
- ChipmunkDokumen19 halamanChipmunkema.nemec13Belum ada peringkat
- Army Aviation Digest - Nov 1978Dokumen52 halamanArmy Aviation Digest - Nov 1978Aviation/Space History Library100% (1)
- Natural Disasters Vocabulary Exercises Fun Activities Games Icebreakers Oneonone Activiti 42747Dokumen2 halamanNatural Disasters Vocabulary Exercises Fun Activities Games Icebreakers Oneonone Activiti 42747Andrea Tercero VillarroelBelum ada peringkat
- Drug Study LidocaineDokumen15 halamanDrug Study LidocaineFrancym R. BatengaBelum ada peringkat
- 10th Aug. 2011 Structural Calculation (For Sub.) - 03Dokumen29 halaman10th Aug. 2011 Structural Calculation (For Sub.) - 03Nguyễn Tiến Việt100% (1)
- Aluminium Alloy - Wikipedia, The Free EncyclopediaDokumen12 halamanAluminium Alloy - Wikipedia, The Free EncyclopediaAshishJoshi100% (1)
- Binet Kamat Test For General Mental AbilitiesDokumen54 halamanBinet Kamat Test For General Mental AbilitiesSana Siddiq100% (14)
- HMT RM65 Radial DrillDokumen2 halamanHMT RM65 Radial Drillsomnath213Belum ada peringkat
- Multiple Choice Enzymes Plant and Animal NutritionDokumen44 halamanMultiple Choice Enzymes Plant and Animal Nutritionliufanjing07Belum ada peringkat
- Properties of Matter ReviewDokumen8 halamanProperties of Matter Reviewapi-290100812Belum ada peringkat
- Superposition and Statically Indetermina - GDLCDokumen25 halamanSuperposition and Statically Indetermina - GDLCAnonymous frFFmeBelum ada peringkat
- ME 352 Design of Machine Elements: Lab ReportDokumen5 halamanME 352 Design of Machine Elements: Lab ReportKeshav VermaBelum ada peringkat
- St. John's Wort: Clinical OverviewDokumen14 halamanSt. John's Wort: Clinical OverviewTrismegisteBelum ada peringkat
- THE WEATHER LISTENING - Stalin GuañunaDokumen1 halamanTHE WEATHER LISTENING - Stalin GuañunaSTALIN JESUS GUA�UNA CHICAIZABelum ada peringkat
- GLP BmsDokumen18 halamanGLP BmsDr.Subhashish TripathyBelum ada peringkat
- Rac Question PaperDokumen84 halamanRac Question PaperibrahimBelum ada peringkat
- Bhagwati School Strap Report AnalysisDokumen60 halamanBhagwati School Strap Report AnalysisReverse Minded100% (1)
- MATLAB Fundamentals Quick ReferenceDokumen43 halamanMATLAB Fundamentals Quick ReferenceCarlos Manuel Cardoza EspitiaBelum ada peringkat
- Analysis of LaminatedDokumen31 halamanAnalysis of LaminatedKaustubh JadhavBelum ada peringkat
- The Variable Resistor Has Been AdjustedDokumen3 halamanThe Variable Resistor Has Been AdjustedPank O RamaBelum ada peringkat
- Ecotopia Remixed II-FormattedDokumen54 halamanEcotopia Remixed II-FormattedthisisdarrenBelum ada peringkat
- Modern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaDokumen2 halamanModern Myth and Magical Face Shifting Technology in Girish Karnad Hayavadana and NagamandalaKumar KumarBelum ada peringkat
- Is 4031 Part 4 - ConsistencyDokumen4 halamanIs 4031 Part 4 - ConsistencyCrypto AbhishekBelum ada peringkat
- Illuminati TruthsDokumen27 halamanIlluminati TruthsDonnaveo ShermanBelum ada peringkat
- Factors Affecting Physical FitnessDokumen7 halamanFactors Affecting Physical FitnessMary Joy Escanillas Gallardo100% (2)
- AR BuildingDokumen819 halamanAR BuildingShithin KrishnanBelum ada peringkat
- Generative Shape DesignDokumen195 halamanGenerative Shape DesignAdi Fiera100% (1)
- Approved Project 25 StandardsDokumen5 halamanApproved Project 25 StandardsepidavriosBelum ada peringkat
- Cell Structure, Function Practice Test With AnswersDokumen16 halamanCell Structure, Function Practice Test With AnswersDJ ISAACSBelum ada peringkat