Anda mungkin juga menyukai
- Development of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsDokumen8 halamanDevelopment of An Advanced Servo Manipulator For Remote Handling in Nuclear InstallationsK. JayarajanBelum ada peringkat
- Development of Sealed Three Piece Master Slave ManipulatorDokumen5 halamanDevelopment of Sealed Three Piece Master Slave ManipulatorK. JayarajanBelum ada peringkat
- ML041000284 PDFDokumen19 halamanML041000284 PDFAnuj DeoBelum ada peringkat
- Laser Dismantling of PHWR Spent Fuel Bundles and De-Cladding of Fuel Pins in The Highly Radioactive Hot CellsDokumen6 halamanLaser Dismantling of PHWR Spent Fuel Bundles and De-Cladding of Fuel Pins in The Highly Radioactive Hot CellsK. JayarajanBelum ada peringkat
- Incident Learning BalcoDokumen1 halamanIncident Learning BalcothehinduBelum ada peringkat
- List of Irs SpecificationsDokumen4 halamanList of Irs SpecificationsSambhav PoddarBelum ada peringkat
- Lloyd S Register Sec. III 2015 Edition OverviewDokumen23 halamanLloyd S Register Sec. III 2015 Edition OverviewYoshua PortugalBelum ada peringkat
- LR - Material and Qualification Procedures For ShipsDokumen17 halamanLR - Material and Qualification Procedures For ShipsprasetyoBelum ada peringkat
- Report On NTPC Industrial Training at Barh (Patna)Dokumen24 halamanReport On NTPC Industrial Training at Barh (Patna)Gautam KumarBelum ada peringkat
- PHYS430: Advanced Lab Laith Marzouka ID: Dr. Khaled Eid: Topic: Vacuum SystemDokumen6 halamanPHYS430: Advanced Lab Laith Marzouka ID: Dr. Khaled Eid: Topic: Vacuum SystemLaith MarzoukaBelum ada peringkat
- MaterialsDokumen36 halamanMaterialsGamalMahranBelum ada peringkat
- Study of Heat Affected Zone (HAZ) in Thermit Welding ProcessDokumen5 halamanStudy of Heat Affected Zone (HAZ) in Thermit Welding ProcessEgi NugrohoBelum ada peringkat
- T23 Field Weld Guidelines Rev 01Dokumen4 halamanT23 Field Weld Guidelines Rev 01tek_surinderBelum ada peringkat
- Mill TutorialDokumen208 halamanMill TutorialMatheus ManciniBelum ada peringkat
- Hydraulic MachineryDokumen60 halamanHydraulic MachinerySushil Kumar Singh100% (1)
- Component Parts KBDokumen12 halamanComponent Parts KBPato PuruncajasBelum ada peringkat
- Create 1 - 2 Hex Bolt - SolidWorks TutorialsDokumen9 halamanCreate 1 - 2 Hex Bolt - SolidWorks Tutorialsandres_palacios_1433Belum ada peringkat
- Welding of Stainless Steel - Sndo KouDokumen17 halamanWelding of Stainless Steel - Sndo KouGovind RajBelum ada peringkat
- Importance of Thermal Hydraulics Different Reactor TypesDokumen19 halamanImportance of Thermal Hydraulics Different Reactor TypesDilip YadavBelum ada peringkat
- Balance of PlantDokumen5 halamanBalance of PlantshringimaheshBelum ada peringkat
- ThermodynamicsDokumen334 halamanThermodynamicshayat100% (1)
- Quality Control in Welding Repair of Pelton RunnerDokumen8 halamanQuality Control in Welding Repair of Pelton RunnerDheeraj ThakurBelum ada peringkat
- Project at A Glance: 3 X 660 MW Boilers and Auxiliary InstallationDokumen16 halamanProject at A Glance: 3 X 660 MW Boilers and Auxiliary InstallationSumit Agrawal100% (1)
- I150 I350 Installation Operation Manual enDokumen9 halamanI150 I350 Installation Operation Manual enIvan ZuritaBelum ada peringkat
- SA253MA DetailDokumen16 halamanSA253MA Detailksquare2001100% (1)
- Slide TSP308 TSP 308 009 Metoda Dan Peralatan KonstruksiDokumen45 halamanSlide TSP308 TSP 308 009 Metoda Dan Peralatan KonstruksiLIKE MUSIC100% (1)
- NTPC Limited: Please Confirm Web Center To p43 Distance ReqdDokumen1 halamanNTPC Limited: Please Confirm Web Center To p43 Distance ReqdTAMILarasuBelum ada peringkat
- Lecture2 - Basic Electric Motor & Generator TheoryDokumen21 halamanLecture2 - Basic Electric Motor & Generator Theorythulasi_krishnaBelum ada peringkat
- Datasheet FXMDokumen6 halamanDatasheet FXMSumit ChaurasiaBelum ada peringkat
- Chapter 3 - Principles of Arc WeldingDokumen32 halamanChapter 3 - Principles of Arc Weldingsipi maseleBelum ada peringkat
- QC Vision SAIL DurgapurDokumen103 halamanQC Vision SAIL DurgapurPratap Panda100% (1)
- Heat Treatment of SteelsDokumen6 halamanHeat Treatment of SteelsSrinivas LaishettyBelum ada peringkat
- Development of Hot Cells and Their Embedded PartsDokumen3 halamanDevelopment of Hot Cells and Their Embedded PartsK. JayarajanBelum ada peringkat
- NBC Training Report - Ball Bearing DivisionDokumen51 halamanNBC Training Report - Ball Bearing DivisionBrandon Johnson100% (6)
- NPTEL - Vacuum TechnologyDokumen38 halamanNPTEL - Vacuum Technologyавдей александрBelum ada peringkat
- Chapter 5 Centre of GravityDokumen27 halamanChapter 5 Centre of Gravityq magicBelum ada peringkat
- 8 MC StructureDokumen26 halaman8 MC StructureNitesh KumarBelum ada peringkat
- Guidelines and Facilities Required For Fabrication Maintenance of Stainless Steel WagonsDokumen14 halamanGuidelines and Facilities Required For Fabrication Maintenance of Stainless Steel WagonsSourav PaulBelum ada peringkat
- GCMS-QP2010Plus User'sGuide (Ver2.5) PDFDokumen408 halamanGCMS-QP2010Plus User'sGuide (Ver2.5) PDFnguyenvietanhbtBelum ada peringkat
- Cutting Tool Materials and Cutting Fluids by Dr. Oğuzhan YILMAZDokumen33 halamanCutting Tool Materials and Cutting Fluids by Dr. Oğuzhan YILMAZpptmnltBelum ada peringkat
- Iodine FilterDokumen5 halamanIodine FilterRajeev Kumar GuptaBelum ada peringkat
- ABB 2014 Main Catalog - Motor Protection and ControlDokumen792 halamanABB 2014 Main Catalog - Motor Protection and Controlcj7man80Belum ada peringkat
- Index Metric Fasteners: M e T R I C SDokumen22 halamanIndex Metric Fasteners: M e T R I C Sjai_79Belum ada peringkat
- Research and Design of Hydraulic AGC System Model of Cold Rolling MillDokumen8 halamanResearch and Design of Hydraulic AGC System Model of Cold Rolling MillOmid Behniya100% (1)
- An Investigation On The Roll Force and Torque Fluctuations During Hot Strip Rolling ProcessDokumen16 halamanAn Investigation On The Roll Force and Torque Fluctuations During Hot Strip Rolling ProcessedpsousaBelum ada peringkat
- Erection Sequence: (For 500 MW Fixed Pedestal Type Turbine With Spring Loaded Foundation)Dokumen4 halamanErection Sequence: (For 500 MW Fixed Pedestal Type Turbine With Spring Loaded Foundation)rohit_me083100% (1)
- Rotating TrolleyDokumen12 halamanRotating TrolleyInderdeep TatlaBelum ada peringkat
- 03 - Rolling of MetalsDokumen61 halaman03 - Rolling of MetalsAbhishek SinhaBelum ada peringkat
- ZWCAD UG Manual 2020 PDFDokumen458 halamanZWCAD UG Manual 2020 PDFEdison NaranjoBelum ada peringkat
- Weld GaugesDokumen15 halamanWeld GaugessojeckBelum ada peringkat
- Introduction To Press Tools and Power PressDokumen60 halamanIntroduction To Press Tools and Power PressThulasi RamBelum ada peringkat
- Iso 17874 3 2011 en PDFDokumen11 halamanIso 17874 3 2011 en PDFfahadkhanffcBelum ada peringkat
- Edge Baffle AsslyDokumen4 halamanEdge Baffle AsslyVikram TambeBelum ada peringkat
- AGC TenovaDokumen2 halamanAGC TenovaVikram TambeBelum ada peringkat
- Du Dub PDFDokumen55 halamanDu Dub PDFSURESH100% (1)
- Mass Flow Control For Intercritical RollingDokumen11 halamanMass Flow Control For Intercritical RollingMeltz Njoroge100% (1)
- Classification of Materials NotesDokumen9 halamanClassification of Materials NotesJohn K KikwaiBelum ada peringkat
- Development of Type B (U) Package For Cobalt-60 Teletherapy Source TransportationDokumen5 halamanDevelopment of Type B (U) Package For Cobalt-60 Teletherapy Source TransportationK. JayarajanBelum ada peringkat
- Suspendable Servo Manipulator For Hot Cell ApplicationDokumen4 halamanSuspendable Servo Manipulator For Hot Cell ApplicationK. JayarajanBelum ada peringkat
- Effect of Link Length Ratio On The Workspace of A Delta RobotDokumen4 halamanEffect of Link Length Ratio On The Workspace of A Delta RobotK. JayarajanBelum ada peringkat
- Automation System For Fuel Pin Fabrication in Shielded FacilityDokumen4 halamanAutomation System For Fuel Pin Fabrication in Shielded FacilityK. JayarajanBelum ada peringkat
- Suspendable Servo Manipulator For Hot Cell ApplicationDokumen4 halamanSuspendable Servo Manipulator For Hot Cell ApplicationK. JayarajanBelum ada peringkat
- Automated Fabrication of AHWR Fuel in Shielded Cells: Challenges and InitiativesDokumen7 halamanAutomated Fabrication of AHWR Fuel in Shielded Cells: Challenges and InitiativesK. JayarajanBelum ada peringkat
- Regulatory Measures and Practices For Radioactive Waste Management in BARC FacilitiesDokumen10 halamanRegulatory Measures and Practices For Radioactive Waste Management in BARC FacilitiesK. JayarajanBelum ada peringkat
- Kinematic Analysis of A Suspended ManipulatorDokumen11 halamanKinematic Analysis of A Suspended ManipulatorK. JayarajanBelum ada peringkat
- The Challenges of Nuclear/ Radiological Terrorism and EmergenciesDokumen7 halamanThe Challenges of Nuclear/ Radiological Terrorism and EmergenciesK. JayarajanBelum ada peringkat
- Development of Digital Radiotherapy Simulator: IMAGINDokumen6 halamanDevelopment of Digital Radiotherapy Simulator: IMAGINK. JayarajanBelum ada peringkat
- Remote Handling Technology in Nuclear IndustryDokumen4 halamanRemote Handling Technology in Nuclear IndustryK. JayarajanBelum ada peringkat
- Development of Four-Piece Servo ManipulatorDokumen6 halamanDevelopment of Four-Piece Servo ManipulatorK. JayarajanBelum ada peringkat
- Development of Type B (U) Package For Cobalt-60 Teletherapy Source TransportationDokumen5 halamanDevelopment of Type B (U) Package For Cobalt-60 Teletherapy Source TransportationK. JayarajanBelum ada peringkat
- Development of Hot Cells and Their Embedded PartsDokumen3 halamanDevelopment of Hot Cells and Their Embedded PartsK. JayarajanBelum ada peringkat
- Development of A Dexterous Gripper For Nuclear ApplicationDokumen5 halamanDevelopment of A Dexterous Gripper For Nuclear ApplicationK. JayarajanBelum ada peringkat
- Gait Generation For A 6-Legged Walking Machine Through Graph Search'Dokumen6 halamanGait Generation For A 6-Legged Walking Machine Through Graph Search'K. JayarajanBelum ada peringkat
- Indigenous Radiation Therapy Machine For Cancer TreatmentDokumen7 halamanIndigenous Radiation Therapy Machine For Cancer TreatmentK. JayarajanBelum ada peringkat
- Fast Path Planning Algorithm For Robot Manipulators Using Spatial Relations in Configuration SpaceDokumen6 halamanFast Path Planning Algorithm For Robot Manipulators Using Spatial Relations in Configuration SpaceK. JayarajanBelum ada peringkat
- Gaits and Energetics in Terrestrial Legged LocomotionDokumen12 halamanGaits and Energetics in Terrestrial Legged LocomotionK. JayarajanBelum ada peringkat
- Remote Survey, Inspection and Operation With A Mobile RobotDokumen8 halamanRemote Survey, Inspection and Operation With A Mobile RobotK. Jayarajan0% (1)
- A Free Gait For Generalized MotionDokumen4 halamanA Free Gait For Generalized MotionK. JayarajanBelum ada peringkat
- Master-Slave Manipulators: Technology and Recent DevelopmentsDokumen11 halamanMaster-Slave Manipulators: Technology and Recent DevelopmentsK. Jayarajan100% (2)
- BARC Develops Cobalt-60 Teletherapy Machine For Cancer TreatmentDokumen6 halamanBARC Develops Cobalt-60 Teletherapy Machine For Cancer TreatmentK. JayarajanBelum ada peringkat
- Bhabhatron: An Indigenous Telecobalt Machine For Cancer TreatmentDokumen8 halamanBhabhatron: An Indigenous Telecobalt Machine For Cancer TreatmentK. JayarajanBelum ada peringkat
- Development of Automatic Remotely Operable Laser Cutting System For Disassembly of PHWR Spent Fuel BundlesDokumen7 halamanDevelopment of Automatic Remotely Operable Laser Cutting System For Disassembly of PHWR Spent Fuel BundlesK. JayarajanBelum ada peringkat
- A Mobile Robot That Removed and Disposed Ammunition BoxesDokumen5 halamanA Mobile Robot That Removed and Disposed Ammunition BoxesK. Jayarajan0% (1)
- Mca 11 00193 PDFDokumen11 halamanMca 11 00193 PDFLuka NikitovicBelum ada peringkat
- Activity No. 2: Motor and Electric DrivesDokumen17 halamanActivity No. 2: Motor and Electric DrivesAldrian BarachinaBelum ada peringkat
- Asado PDFDokumen89 halamanAsado PDFheningputriBelum ada peringkat
- ELMOT PresentationDokumen4 halamanELMOT PresentationEpure GabrielBelum ada peringkat
- Bosch Rexroth Motor 1MBDokumen180 halamanBosch Rexroth Motor 1MBmostafaBelum ada peringkat
- 2020 03 Maintworld AdashDokumen2 halaman2020 03 Maintworld AdashaabejaroBelum ada peringkat
- AE10 SolDokumen223 halamanAE10 SolDrGopikrishna PasamBelum ada peringkat
- Onan Genset Service ManualDokumen154 halamanOnan Genset Service ManualSaheer Ambadan100% (4)
- Study of Turbo Generator Samir PoulDokumen76 halamanStudy of Turbo Generator Samir Pouldhathu11100% (1)
- Determining The Surface Dynamometer CardDokumen7 halamanDetermining The Surface Dynamometer CardMohamed GhareebBelum ada peringkat
- Chapter8 BookDokumen28 halamanChapter8 BookkfaliBelum ada peringkat
- Design of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.Dokumen7 halamanDesign of Four-Pole Permanent Magnet Motor With Different Rotor Topologies.kalyanBelum ada peringkat
- Presentation On Motors & VFD: Submitted To:-Submitted ByDokumen32 halamanPresentation On Motors & VFD: Submitted To:-Submitted Byparth dosiBelum ada peringkat
- Motor Manufacturing Process FlowDokumen8 halamanMotor Manufacturing Process FlowcmashtamoorthyBelum ada peringkat
- Synchronous MotorsDokumen15 halamanSynchronous MotorsVIJORN ANDRE DIZONBelum ada peringkat
- PTC B1.1 Notes - Sub Module 17.4 (Propeller Synchronising)Dokumen15 halamanPTC B1.1 Notes - Sub Module 17.4 (Propeller Synchronising)Interogator5Belum ada peringkat
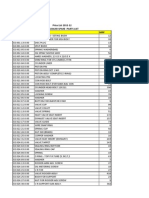
- Kirloskar MRP Price ListDokumen144 halamanKirloskar MRP Price Listengg2012elect85% (26)
- Electrical Performance Testing of AC MotorsDokumen3 halamanElectrical Performance Testing of AC Motorsnguyen_huu_duy_hcmBelum ada peringkat
- 3 Basic Electrical EngineeringDokumen4 halaman3 Basic Electrical EngineeringJyothsna VayyalaBelum ada peringkat
- Fitting & Acc.Dokumen802 halamanFitting & Acc.Андрей АндреевBelum ada peringkat
- JWST DTA Stepper Motor Anomaly and Lessons Learned-7!23!15Dokumen8 halamanJWST DTA Stepper Motor Anomaly and Lessons Learned-7!23!15anhntran4850Belum ada peringkat
- Intorduction To Power Engineering - 4 GeneratorsDokumen26 halamanIntorduction To Power Engineering - 4 Generatorssyedsalmanali91Belum ada peringkat
- M Excitation SystemDokumen34 halamanM Excitation Systemjp mishraBelum ada peringkat
- CG Power and Industrial Solutions Limited: LT Motors Division AhmednagarDokumen1 halamanCG Power and Industrial Solutions Limited: LT Motors Division AhmednagarMohan BabuBelum ada peringkat
- Induction Generator Theory and ApplicationDokumen8 halamanInduction Generator Theory and ApplicationDiego Nicolás López-RamírezBelum ada peringkat
- Design of A Small Scale Wind Generator For Low Wind Speed AreasDokumen15 halamanDesign of A Small Scale Wind Generator For Low Wind Speed Areasأحمد إبراهيم شواربBelum ada peringkat
- 130904-3 Gtu 3rd Sem PaperDokumen3 halaman130904-3 Gtu 3rd Sem PaperShailesh SankdasariyaBelum ada peringkat
- Auto Roll Punching MachineDokumen42 halamanAuto Roll Punching MachineANAND KRISHNAN100% (1)
- 18 Ee 442Dokumen2 halaman18 Ee 442Kubera UBelum ada peringkat