Anda mungkin juga menyukai
- Charles Darwin University: HIT332: Embedded and Mobile Systems Casuarina CampusDokumen13 halamanCharles Darwin University: HIT332: Embedded and Mobile Systems Casuarina CampusNguyen Anh ThangBelum ada peringkat
- M1 M6 MicroLecDokumen360 halamanM1 M6 MicroLecDylan CosepBelum ada peringkat
- CPE 412 Ch2Dokumen12 halamanCPE 412 Ch2Raqz TVBelum ada peringkat
- Ch1-Introduction To MicrocontrollerDokumen4 halamanCh1-Introduction To MicrocontrollerAbhilasha MathurBelum ada peringkat
- Programming For Problem SolvingDokumen95 halamanProgramming For Problem Solvingseemakujur3377Belum ada peringkat
- Microprocessors and Microcontrollers DesignDokumen8 halamanMicroprocessors and Microcontrollers DesignBittu VermaBelum ada peringkat
- The Brain Behind The Computing: TechnologyDokumen3 halamanThe Brain Behind The Computing: TechnologykarmaBelum ada peringkat
- Arduino BSITDokumen221 halamanArduino BSITadrianonda373Belum ada peringkat
- Device Drivers: The Tempo Operating SystemDokumen6 halamanDevice Drivers: The Tempo Operating SystemTravis WoodBelum ada peringkat
- Introduction To MicrocontrollersDokumen3 halamanIntroduction To MicrocontrollersRohit BaranwalBelum ada peringkat
- Arduino IntroDokumen26 halamanArduino IntroMithun kumarBelum ada peringkat
- Lab Handout 1.Dokumen15 halamanLab Handout 1.Abdul basit MemonBelum ada peringkat
- Component 2Dokumen2 halamanComponent 2karmaBelum ada peringkat
- Detail Produk Arduino Robot DuinopeakDokumen4 halamanDetail Produk Arduino Robot DuinopeakDražen BorčićBelum ada peringkat
- Cukurova University Faculty of Engineering and Architecture Department of Mechanical Engineering Experiment ReportDokumen8 halamanCukurova University Faculty of Engineering and Architecture Department of Mechanical Engineering Experiment ReportSülbiye İşçi TemizciBelum ada peringkat
- Exploring Arduino: Tools and Techniques for Engineering WizardryDari EverandExploring Arduino: Tools and Techniques for Engineering WizardryPenilaian: 4.5 dari 5 bintang4.5/5 (5)
- Computing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisDokumen38 halamanComputing Platforms: Design Methodology. Consumer Electronics Architectures. System-Level Performance and Power AnalysisLordwin MichealBelum ada peringkat
- Linux Device DriversDokumen39 halamanLinux Device Driverscoolsam.sab100% (1)
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Dari EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.Belum ada peringkat
- Arduino As An ISP For AVR Microcontrollers (Atmega32)Dokumen8 halamanArduino As An ISP For AVR Microcontrollers (Atmega32)michael jaroya100% (1)
- Network Drivers LabDokumen20 halamanNetwork Drivers LabAyesha BanuBelum ada peringkat
- Linux Device Driver DesignDokumen8 halamanLinux Device Driver DesignhibouvnBelum ada peringkat
- Introduction To ArduinoDokumen9 halamanIntroduction To Arduinoahmad jamelBelum ada peringkat
- C Programming for the Pc the Mac and the Arduino Microcontroller SystemDari EverandC Programming for the Pc the Mac and the Arduino Microcontroller SystemBelum ada peringkat
- I. 8051 Microcontroller: FeaturesDokumen9 halamanI. 8051 Microcontroller: FeaturesSuresh IbkBelum ada peringkat
- 1.1 Arduino Duemilanove: Mini Project Report 8-Bit RISC Microprocessor Using VHDLDokumen9 halaman1.1 Arduino Duemilanove: Mini Project Report 8-Bit RISC Microprocessor Using VHDLDeepak DineshBelum ada peringkat
- Experiment 3Dokumen56 halamanExperiment 3Ayusha JagtapBelum ada peringkat
- Micro HopeDokumen48 halamanMicro Hopeviolator100% (1)
- Character Device DriverDokumen42 halamanCharacter Device DriverNaga ManjunathBelum ada peringkat
- Arduino For Beginners: How to get the most of out of your Arduino, including Arduino basics, Arduino tips and tricks, Arduino projects and more!Dari EverandArduino For Beginners: How to get the most of out of your Arduino, including Arduino basics, Arduino tips and tricks, Arduino projects and more!Belum ada peringkat
- Arduino Programming For ESD: by MD - Dedarul HasanDokumen38 halamanArduino Programming For ESD: by MD - Dedarul HasandedarulBelum ada peringkat
- What Is Microcontroller?Dokumen119 halamanWhat Is Microcontroller?Vishal Gudla NagrajBelum ada peringkat
- Mcus How Do They WorkDokumen21 halamanMcus How Do They WorkhoudaBelum ada peringkat
- Device Drivers PDFDokumen28 halamanDevice Drivers PDF2015mdaamir2015100% (1)
- Arduino Manual v7Dokumen21 halamanArduino Manual v7Isar Andrei100% (6)
- Microprocessors & Microcontrollers: Aurabindo JDokumen21 halamanMicroprocessors & Microcontrollers: Aurabindo Jmelquiades7007Belum ada peringkat
- Programming PIC Microcontrollers in CDokumen126 halamanProgramming PIC Microcontrollers in CShomeswaran Mugunthan100% (3)
- Esd 1Dokumen40 halamanEsd 1154Soyal LonareBelum ada peringkat
- Mic Project ReportDokumen11 halamanMic Project ReportDivya BansodeBelum ada peringkat
- Begin Parallel Programming With OpenMP - CodeProjectDokumen8 halamanBegin Parallel Programming With OpenMP - CodeProjectManojSudarshanBelum ada peringkat
- PLC Sample Assignment Structure FOR REFERENCE ONLYDokumen29 halamanPLC Sample Assignment Structure FOR REFERENCE ONLYkier90Belum ada peringkat
- DC Motor Control Using Simulink and Adafruit Morot ShieldDokumen4 halamanDC Motor Control Using Simulink and Adafruit Morot Shieldharis shehzadBelum ada peringkat
- Introduction To MicrocontrollersDokumen13 halamanIntroduction To MicrocontrollerssvirkomartinkoBelum ada peringkat
- Atmega TutorialDokumen18 halamanAtmega Tutorialsaran2012Belum ada peringkat
- Project 1: Threads: 2.1 BackgroundDokumen14 halamanProject 1: Threads: 2.1 BackgroundСука БлятьBelum ada peringkat
- Experiment No.4Dokumen12 halamanExperiment No.4Kshitij DudheBelum ada peringkat
- Vlsi Manual 2013-2014Dokumen36 halamanVlsi Manual 2013-2014hr_suresh_kBelum ada peringkat
- CompDokumen14 halamanCompapi-318297418Belum ada peringkat
- 8 TemparatureDokumen31 halaman8 TemparatureDemonfox NarutoUzumakiBelum ada peringkat
- Interfacing With Device DriversDokumen6 halamanInterfacing With Device DriversRAMU100% (1)
- Booting An Intel System Architecture: November 2015Dokumen20 halamanBooting An Intel System Architecture: November 2015vinuBelum ada peringkat
- Operating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesDari EverandOperating Systems Interview Questions You'll Most Likely Be Asked: Job Interview Questions SeriesBelum ada peringkat
- 1.3 Inch OLED I2C Display - ENDokumen30 halaman1.3 Inch OLED I2C Display - ENwilsnicoBelum ada peringkat
- CCCCCC CDokumen60 halamanCCCCCC CSanthan ManneBelum ada peringkat
- Lab3 PDFDokumen14 halamanLab3 PDFMd.Arifur RahmanBelum ada peringkat
- In System Programming (ISP) For ATMEL Chips: A Step by Step Construction GuideDokumen9 halamanIn System Programming (ISP) For ATMEL Chips: A Step by Step Construction Guidezbhp zBelum ada peringkat
- Linux User ManualDokumen19 halamanLinux User ManualAnonymous QIuAGIadXmBelum ada peringkat
- 3rd STD Science Guide - Term 2 - EM - SampleDokumen8 halaman3rd STD Science Guide - Term 2 - EM - SampleAnonymous QIuAGIadXmBelum ada peringkat
- Density Based Traffic Light Control System ObjectivesDokumen2 halamanDensity Based Traffic Light Control System ObjectivesAnonymous QIuAGIadXmBelum ada peringkat
- Table of ContentDokumen49 halamanTable of ContentAnonymous QIuAGIadXmBelum ada peringkat
- Ece Dept: (Decade Resistance Box) - 1Dokumen1 halamanEce Dept: (Decade Resistance Box) - 1Anonymous QIuAGIadXmBelum ada peringkat
- Android SyllabusDokumen2 halamanAndroid SyllabusAnonymous QIuAGIadXmBelum ada peringkat
- LifiDokumen21 halamanLifiAnonymous QIuAGIadXmBelum ada peringkat
- Vehicle MonitorDokumen6 halamanVehicle MonitorAnonymous QIuAGIadXmBelum ada peringkat
- Bonafide-Certificate: Office of The Dean, Academic AffairsDokumen1 halamanBonafide-Certificate: Office of The Dean, Academic AffairsAnonymous QIuAGIadXmBelum ada peringkat
- Slope Stability in Slightly Fissured Claystones and MarlsDokumen25 halamanSlope Stability in Slightly Fissured Claystones and MarlsrullyirwandiBelum ada peringkat
- Good Practices in Government Resource Planning, Developed Vs Developing CountriesDokumen11 halamanGood Practices in Government Resource Planning, Developed Vs Developing CountriesFreeBalanceGRPBelum ada peringkat
- Rigaku Progeny Spec Sheet LTR 3.14Dokumen2 halamanRigaku Progeny Spec Sheet LTR 3.14DATA24Belum ada peringkat
- Woodworking Plans - Wheelbarrow PlanterDokumen3 halamanWoodworking Plans - Wheelbarrow PlanterMirel HotescuBelum ada peringkat
- Biomasse-HKW Sandreuth E NQDokumen8 halamanBiomasse-HKW Sandreuth E NQValeriu StanBelum ada peringkat
- PT14 Engine Monitor 1Dokumen2 halamanPT14 Engine Monitor 1BJ DixBelum ada peringkat
- Braun KF40 - CDokumen17 halamanBraun KF40 - CAgung UtoyoBelum ada peringkat
- Restoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Dokumen4 halamanRestoration and Adaptive Re-Use of Queen Mary's High School: Phase-1Sonali GurungBelum ada peringkat
- Ofdma: LTE Air Interface CourseDokumen63 halamanOfdma: LTE Air Interface CourseAkhtar KhanBelum ada peringkat
- SQ Presentation 2021-r2Dokumen43 halamanSQ Presentation 2021-r2nadeem4ahmed-805026Belum ada peringkat
- A9K CatalogueDokumen152 halamanA9K CatalogueMohamed SaffiqBelum ada peringkat
- 1Dokumen100 halaman1Niomi GolraiBelum ada peringkat
- Defects in Welds: PorosityDokumen40 halamanDefects in Welds: PorosityrohanBelum ada peringkat
- Session 5 PDFDokumen26 halamanSession 5 PDFToufic HageBelum ada peringkat
- Quantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestDokumen31 halamanQuantity Surveying Division Assessment of Professional Competence Final Assessment 2014 Practice Problems / Part Ii Written TestjackyBelum ada peringkat
- 25252525Dokumen38 halaman25252525Ivan GonzalezBelum ada peringkat
- Asgmnt HECRASDokumen7 halamanAsgmnt HECRASShahruzi MahadzirBelum ada peringkat
- Pioneer XDP - 30R ManualDokumen213 halamanPioneer XDP - 30R Manualmugurel_stanescuBelum ada peringkat
- Oracle Jrockit Mission Control Lab GuideDokumen17 halamanOracle Jrockit Mission Control Lab GuideashuhegdeBelum ada peringkat
- Heat Transfer - A Basic Approach - OzisikDokumen760 halamanHeat Transfer - A Basic Approach - OzisikMaraParesque91% (33)
- TechSpec MistralDokumen4 halamanTechSpec MistralScarab SweepersBelum ada peringkat
- V.K Jain-Advanced Machining Processes-Allied Publications PDFDokumen370 halamanV.K Jain-Advanced Machining Processes-Allied Publications PDFMayank Vyas100% (1)
- Bazele Matematice Ale Calculatoarelor - Florian Mircea BoianDokumen132 halamanBazele Matematice Ale Calculatoarelor - Florian Mircea BoiannimsocBelum ada peringkat
- Idlers - Medium To Heavy Duty PDFDokumen28 halamanIdlers - Medium To Heavy Duty PDFEd Ace100% (1)
- An 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Dokumen4 halamanAn 80-Mg Railroad Engine A Coasting at 6.5 KM - H Strikes A 20Aura Milena Martinez ChavarroBelum ada peringkat
- Online Order Processing SystemDokumen34 halamanOnline Order Processing SystemMuhammad ShujaBelum ada peringkat
- HighpuritysealsDokumen6 halamanHighpuritysealstuannhocutBelum ada peringkat
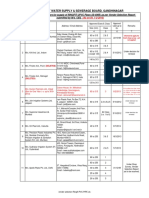
- GWSSB Vendor List 19.11.2013Dokumen18 halamanGWSSB Vendor List 19.11.2013sivesh_rathiBelum ada peringkat
- Lesson Plan 2 Road FurnitureDokumen4 halamanLesson Plan 2 Road FurnitureShahbaz SharifBelum ada peringkat
- Iec60092-350 (Ed2 0) enDokumen7 halamanIec60092-350 (Ed2 0) enAzad RahmanBelum ada peringkat