Anda mungkin juga menyukai
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Improvement of Bit Rate Using M-Ary Chaotic Pulse Position ModulationDokumen8 halamanImprovement of Bit Rate Using M-Ary Chaotic Pulse Position ModulationvietbinhdinhBelum ada peringkat
- Real TOEFL iBT Speaking Test Questions From March 2005 Up To NowDokumen6 halamanReal TOEFL iBT Speaking Test Questions From March 2005 Up To NowvietbinhdinhBelum ada peringkat
- Characteristic List & DefinitionsDokumen5 halamanCharacteristic List & Definitionstabithapang89% (116)
- Possible Topic For TOEFL Ibt Speaking Task 1Dokumen9 halamanPossible Topic For TOEFL Ibt Speaking Task 1vietbinhdinhBelum ada peringkat
- Barron's Gives Good Hints About How To Structure The Essay: BooksDokumen3 halamanBarron's Gives Good Hints About How To Structure The Essay: BooksvietbinhdinhBelum ada peringkat
- CMakeDokumen18 halamanCMakevietbinhdinhBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- BS en 60300 3 11 2009Dokumen52 halamanBS en 60300 3 11 2009whmidi7331100% (4)
- Montaj Geophysics v6.1: Tutorial and User GuideDokumen38 halamanMontaj Geophysics v6.1: Tutorial and User Guide文良UsuluddinBelum ada peringkat
- JSP TutorialDokumen280 halamanJSP Tutorialeduardo_quintanill_3Belum ada peringkat
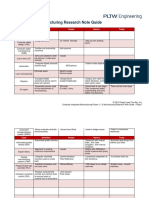
- Project 1.1.3 Manufacturing Research Note Guide: Topic People History TodayDokumen2 halamanProject 1.1.3 Manufacturing Research Note Guide: Topic People History TodayMichael BilczoBelum ada peringkat
- Oracle Database 10g Architecture: - South 1 MITDokumen28 halamanOracle Database 10g Architecture: - South 1 MITSaravanan BaskarBelum ada peringkat
- LT8490 - High Voltage, High Current Buck-Boost Battery Charge Controller With Maximum Power Point Tracking (MPPT)Dokumen42 halamanLT8490 - High Voltage, High Current Buck-Boost Battery Charge Controller With Maximum Power Point Tracking (MPPT)RamKumarBelum ada peringkat
- 4 - Networks and Cloud ComputingDokumen4 halaman4 - Networks and Cloud Computingcyka blyatBelum ada peringkat
- Malfunction's Winasm Tutorial For TASMDokumen7 halamanMalfunction's Winasm Tutorial For TASMAikone65Belum ada peringkat
- Travel Package Recommendation SystemDokumen55 halamanTravel Package Recommendation SystemVisarikaBelum ada peringkat
- wt2014 ThingspeakDokumen8 halamanwt2014 ThingspeakSoethree YonoBelum ada peringkat
- Ajay AnandDokumen17 halamanAjay AnandSanjaBelum ada peringkat
- Scope of Engineering in Today's ScenerioDokumen15 halamanScope of Engineering in Today's ScenerioPrem sharmaBelum ada peringkat
- Failed To Deploy - PlatformName - Can Not Communicate With Remote Node - InSource KnowledgeCenterDokumen3 halamanFailed To Deploy - PlatformName - Can Not Communicate With Remote Node - InSource KnowledgeCenterTaleb EajalBelum ada peringkat
- HeleDokumen2 halamanHeleMa. Kristel OrbocBelum ada peringkat
- TMF190 eSRSEmployerEnrollmentForm V04 PDFDokumen1 halamanTMF190 eSRSEmployerEnrollmentForm V04 PDFCecilia IntalBelum ada peringkat
- Vantagens Do UNM2000Dokumen49 halamanVantagens Do UNM2000Stuart RaphaelBelum ada peringkat
- Configuracion Consola Routers 1Dokumen6 halamanConfiguracion Consola Routers 1Maria Fernanda Monroy HernandezBelum ada peringkat
- Mobile Remote Deposit Capture (Public Facing Site)Dokumen15 halamanMobile Remote Deposit Capture (Public Facing Site)Kendra ShillingtonBelum ada peringkat
- Ruckus Icx Switch QSGDokumen12 halamanRuckus Icx Switch QSGnothingtoloseBelum ada peringkat
- Backward Scheduling For Projects: Jared CummingsDokumen20 halamanBackward Scheduling For Projects: Jared CummingsWilfredo Alvarez100% (1)
- SECURITY CLEARANCE - Top Secret - SCI Eligible CertificationsDokumen7 halamanSECURITY CLEARANCE - Top Secret - SCI Eligible CertificationsAshwani kumarBelum ada peringkat
- DS056832 A 1 PDFDokumen1 halamanDS056832 A 1 PDFjesus juarezBelum ada peringkat
- Cambium Networks Data Sheet Network Service EdgeDokumen4 halamanCambium Networks Data Sheet Network Service EdgeGirish GowdaBelum ada peringkat
- Trimble CFX-750 UserGuide 4A POR CMDokumen218 halamanTrimble CFX-750 UserGuide 4A POR CMValter MortaguaBelum ada peringkat
- PRESENSI WEBINAR MGMP GEOGRAFI KE 2 (Responses)Dokumen3 halamanPRESENSI WEBINAR MGMP GEOGRAFI KE 2 (Responses)MUHAMMAD YAMINIBelum ada peringkat
- SET ManualDokumen384 halamanSET ManualVijendra Ml100% (3)
- Zomato Employee Success ManagerDokumen31 halamanZomato Employee Success Managerapi-344311502Belum ada peringkat
- Mern - DucatDokumen6 halamanMern - DucatCynthia Hr Radical MoveBelum ada peringkat
- Oracle® Fusion Middleware: Oracle Goldengate Security GuideDokumen94 halamanOracle® Fusion Middleware: Oracle Goldengate Security GuideDomenico ConteBelum ada peringkat
- Ece 590 - Digital System Design Using Hardware Description Languages Spring 2006Dokumen17 halamanEce 590 - Digital System Design Using Hardware Description Languages Spring 2006Omar Valenzuela LopezBelum ada peringkat