Anda mungkin juga menyukai
- Artes LiberalesDokumen5 halamanArtes LiberalesErick Poumián PalomecBelum ada peringkat
- ConvertidoresDokumen3 halamanConvertidoresErick Poumián PalomecBelum ada peringkat
- Ingreso A MangoDokumen7 halamanIngreso A MangoErick Poumián PalomecBelum ada peringkat
- Imperativo RusoDokumen8 halamanImperativo RusoErick Poumián PalomecBelum ada peringkat
- Propiedades de Los CamposDokumen17 halamanPropiedades de Los CamposErick Poumián PalomecBelum ada peringkat
- Fotogrametria PDFDokumen13 halamanFotogrametria PDFPamela MautinoBelum ada peringkat
- Examen Práctico de InglésDokumen34 halamanExamen Práctico de InglésErick Poumián Palomec33% (3)
- Actnmodulon 1Dokumen1 halamanActnmodulon 1Erick Poumián PalomecBelum ada peringkat
- Grado Comparativo de Los Adjetivos RUSODokumen3 halamanGrado Comparativo de Los Adjetivos RUSOErick Poumián PalomecBelum ada peringkat
- Ejercicios Programación LinealDokumen8 halamanEjercicios Programación LinealErick Poumián PalomecBelum ada peringkat
- InternetDokumen16 halamanInternetErick Poumián PalomecBelum ada peringkat
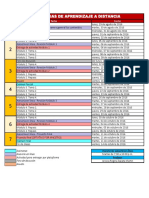
- ESTRATEGIASn DEn APRENDIZAJEn An DISTANCIAnDokumen1 halamanESTRATEGIASn DEn APRENDIZAJEn An DISTANCIAnErick Poumián PalomecBelum ada peringkat
- ProgramaDokumen4 halamanProgramaErick Poumián PalomecBelum ada peringkat
- S9 3 PDFDokumen7 halamanS9 3 PDFErick Poumián PalomecBelum ada peringkat
- TSP 1Dokumen11 halamanTSP 1napster26Belum ada peringkat
- Formulacion de Modelos PDFDokumen26 halamanFormulacion de Modelos PDFErick Poumián PalomecBelum ada peringkat
- DIODODokumen7 halamanDIODOMario YañezBelum ada peringkat
- A Punt AdoresDokumen8 halamanA Punt AdoresErick Poumián PalomecBelum ada peringkat
- Ejercicios Programación LinealDokumen6 halamanEjercicios Programación LinealErick Poumián PalomecBelum ada peringkat
- Formulacion de Modelos PDFDokumen26 halamanFormulacion de Modelos PDFErick Poumián PalomecBelum ada peringkat
- Fotogrametria PDFDokumen13 halamanFotogrametria PDFPamela MautinoBelum ada peringkat
- Reporte Práctica 2 - Control de Disparo de Un TRIACDokumen6 halamanReporte Práctica 2 - Control de Disparo de Un TRIACErick Poumián PalomecBelum ada peringkat
- Relojes y Parámetros GlobalesDokumen2 halamanRelojes y Parámetros GlobalesErick Poumián PalomecBelum ada peringkat
- Circuitos Basicos de Potencia Con TiristoresDokumen14 halamanCircuitos Basicos de Potencia Con TiristoresErick Poumián PalomecBelum ada peringkat
- Sleep TimerDokumen9 halamanSleep TimerErick Poumián PalomecBelum ada peringkat
- IDE Arduino + ArddublockDokumen35 halamanIDE Arduino + ArddublockSinezio JuniorBelum ada peringkat
- RobóticaDokumen26 halamanRobóticaErick Poumián PalomecBelum ada peringkat
- Guía de Estimación de CostosDokumen1 halamanGuía de Estimación de CostosErick Poumián PalomecBelum ada peringkat
- Reducciafrac34 N de SubsistemasDokumen22 halamanReducciafrac34 N de SubsistemasErick Poumián PalomecBelum ada peringkat
- Estrategias de Operaciones en Un Entorno GlobalDokumen11 halamanEstrategias de Operaciones en Un Entorno GlobalLaura SeverinoBelum ada peringkat
- Maderera Llanos de TacnaDokumen6 halamanMaderera Llanos de TacnaDiego Alfredo Chambilla Aduvire100% (1)
- Cubiertas Manual de InstalacionDokumen20 halamanCubiertas Manual de InstalacionJuliam NaranjoBelum ada peringkat
- 001 Limpieza de BañosDokumen3 halaman001 Limpieza de BañosHector Uribe Gonzalez100% (1)
- El VerlagerDokumen38 halamanEl VerlagerArmando SolaresBelum ada peringkat
- Caracteristicas BroncesDokumen4 halamanCaracteristicas BronceselavayenBelum ada peringkat
- Residente en Obras de EdificacionesDokumen4 halamanResidente en Obras de EdificacionesMaNuel Miranda VelardeBelum ada peringkat
- Reacciones Quimicas IDokumen4 halamanReacciones Quimicas Icesar_menendez_eduBelum ada peringkat
- Convertidor TenienteDokumen7 halamanConvertidor TenienteAlejandro Rubio LopeteguiBelum ada peringkat
- Sílabo 2017-0Dokumen3 halamanSílabo 2017-0AnthonyMurilloRiveraBelum ada peringkat
- Armand VDokumen3 halamanArmand VEvelyn J. HernandezBelum ada peringkat
- Metalmecanica y SiderurgiaDokumen48 halamanMetalmecanica y SiderurgiaivygissBelum ada peringkat
- Cocot, Casa J., Tienda Ropa Distribuidor MayoristaDokumen3 halamanCocot, Casa J., Tienda Ropa Distribuidor MayoristabarrylmmwitplbhBelum ada peringkat
- Logística y Cadenas de SuministroDokumen9 halamanLogística y Cadenas de SuministroAldo OrozcoBelum ada peringkat
- Matriz Sistemas de ManufacturaDokumen18 halamanMatriz Sistemas de ManufacturaManuel Mendez BarriosBelum ada peringkat
- Inventarios ShamblinDokumen21 halamanInventarios ShamblinDavid CarvajalBelum ada peringkat
- Costos Conjuntos y Punto de SeparaciónDokumen10 halamanCostos Conjuntos y Punto de SeparaciónTarazona Echigoyen Judith50% (4)
- Diseño de Implementacion de Un Ciclo de Fabricacion de Un PupitreDokumen6 halamanDiseño de Implementacion de Un Ciclo de Fabricacion de Un PupitreAnderson GomezBelum ada peringkat
- Costos Industriales PDFDokumen36 halamanCostos Industriales PDFOsir Morency Garcia PerezBelum ada peringkat
- Clasificación Del Cemento PortlandDokumen8 halamanClasificación Del Cemento PortlandGustavoToapantaBelum ada peringkat
- Resumen Economía Sin CorbataDokumen6 halamanResumen Economía Sin CorbataJuan Carlos ArbelaezBelum ada peringkat
- El Uruguay de La Modernización 1876Dokumen2 halamanEl Uruguay de La Modernización 1876gabsilvagom28Belum ada peringkat
- Segregacion de ResiduosDokumen17 halamanSegregacion de Residuosing_madeBelum ada peringkat
- Presentacion Sap Capacitacion ResumenDokumen43 halamanPresentacion Sap Capacitacion ResumenYesly MartinezBelum ada peringkat
- Refine RiaDokumen8 halamanRefine RiaPeña DulceBelum ada peringkat
- Proyecto Innovacion Confeccion Textil SenatiDokumen39 halamanProyecto Innovacion Confeccion Textil SenatiJohnJenrryHuancaZunigaBelum ada peringkat
- Procesos Que Cambian La Forma de Un MaterialDokumen11 halamanProcesos Que Cambian La Forma de Un MaterialHUGUIS COLLAGUAZO100% (3)
- Casos Cap 1Dokumen4 halamanCasos Cap 1martin canepa100% (2)
- Temario de Planeación y Control de La ProducciónDokumen4 halamanTemario de Planeación y Control de La ProducciónChopper Everardo Flores ChoperenaBelum ada peringkat
- DesperdiciosDokumen25 halamanDesperdiciosLuis Noreña NuñezBelum ada peringkat