Anda mungkin juga menyukai
- QUESTIONDokumen15 halamanQUESTIONHammad SargurohBelum ada peringkat
- Numericals of Forced Vib Lec#06Dokumen7 halamanNumericals of Forced Vib Lec#06Qamar Uz ZamanBelum ada peringkat
- Ejercicios Modeling of Dynamic Systems1Dokumen6 halamanEjercicios Modeling of Dynamic Systems1J Jick PerSeiBelum ada peringkat
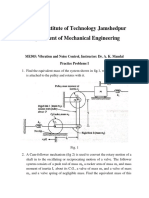
- ME34ME505 - Vibration and Noise ControlPractice Problems IDokumen20 halamanME34ME505 - Vibration and Noise ControlPractice Problems IMUHAMMAD ASJAD AAMIR AAMIR AMINBelum ada peringkat
- CIE4145 2014 Assignments On Dynamics of SystemsDokumen9 halamanCIE4145 2014 Assignments On Dynamics of SystemstimsykiBelum ada peringkat
- Control System Assignment 1Dokumen4 halamanControl System Assignment 1atharvaBelum ada peringkat
- Mini Problem s2 2023Dokumen5 halamanMini Problem s2 2023Annette TageufoueBelum ada peringkat
- 振動學題庫 2Dokumen11 halaman振動學題庫 2San DugoBelum ada peringkat
- Chapter-Ii Introduction To ModellingDokumen50 halamanChapter-Ii Introduction To ModellingAHMEDBelum ada peringkat
- Vib104 HW1Dokumen5 halamanVib104 HW1Tai-Yuan HsuBelum ada peringkat
- 16 Marks TovDokumen13 halaman16 Marks TovrenjithrenjuBelum ada peringkat
- Practice Problems For Advanced Vibrations: April 2019Dokumen36 halamanPractice Problems For Advanced Vibrations: April 2019Animesh ChandraBelum ada peringkat
- Practice Problems For Advanced Vibrations: April 2019Dokumen36 halamanPractice Problems For Advanced Vibrations: April 2019Animesh ChandraBelum ada peringkat
- DEC Mechanical Vibration Worksheet 1Dokumen6 halamanDEC Mechanical Vibration Worksheet 1ephrembusiness2Belum ada peringkat
- Assignment 1Dokumen3 halamanAssignment 1Weng Huat OngBelum ada peringkat
- ME5205: Theory of Vibrations: Assignment 3 Systems With Multiple Degrees of Freedom Date of Submission: 6 November 2019Dokumen3 halamanME5205: Theory of Vibrations: Assignment 3 Systems With Multiple Degrees of Freedom Date of Submission: 6 November 2019Dinesh BompadaBelum ada peringkat
- Practice Problems For Advanced Vibrations: April 2019Dokumen36 halamanPractice Problems For Advanced Vibrations: April 2019KEVIN CORDOVA RODRIGUEZ100% (1)
- CH 2Dokumen95 halamanCH 2유지상Belum ada peringkat
- Exercise 2021Dokumen5 halamanExercise 2021BaslielBelum ada peringkat
- Homework2 PDFDokumen2 halamanHomework2 PDFRobin Robertson100% (1)
- рисунки PDFDokumen18 halamanрисунки PDFLeo KutsBelum ada peringkat
- ME354A - Assignment 3Dokumen4 halamanME354A - Assignment 3Ryan ArcherBelum ada peringkat
- Vibrations HW CH 1-4Dokumen33 halamanVibrations HW CH 1-4osullivryan67% (3)
- PDF Dynamic Analysis of StructuresDokumen43 halamanPDF Dynamic Analysis of StructuresChegue BureBelum ada peringkat
- Chapter-2 - Free UnDamped VibrationsDokumen31 halamanChapter-2 - Free UnDamped VibrationsMuhammad haider AyazBelum ada peringkat
- 02Dokumen43 halaman02Vitelio PinzonBelum ada peringkat
- Summary of Topic Covered in ECE408Dokumen89 halamanSummary of Topic Covered in ECE408Nishikata ManipolBelum ada peringkat
- 2014 ExercisesDokumen8 halaman2014 ExercisesElvir PecoBelum ada peringkat
- Simplest Chaotic CircuitDokumen14 halamanSimplest Chaotic CircuitbamazBelum ada peringkat
- BallonbeamDokumen22 halamanBallonbeamYuan HuBelum ada peringkat
- 5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionDokumen8 halaman5.6 Unforced Mechanical Vibrations: Simple Harmonic MotionHaridev MoorthyBelum ada peringkat
- Study of Rotor-Bearing Systems Using Campbell DiagramDokumen4 halamanStudy of Rotor-Bearing Systems Using Campbell DiagrammishraenggBelum ada peringkat
- Tutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Dokumen6 halamanTutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Jojnojie DannyzBelum ada peringkat
- Step 1: Mathematical Modeling: 1 Vibration Analysis ProcedureDokumen22 halamanStep 1: Mathematical Modeling: 1 Vibration Analysis ProcedureNirmal JayanthBelum ada peringkat
- Dynamic Analysis of StructuresDokumen57 halamanDynamic Analysis of StructuresYollanda LorenzaBelum ada peringkat
- Practice Problems Set-3Dokumen6 halamanPractice Problems Set-3ganeshBelum ada peringkat
- Ic6501 Control SystemsDokumen67 halamanIc6501 Control SystemsK.Sushita VISTASBelum ada peringkat
- Wittrick - WilliamsDokumen4 halamanWittrick - WilliamsBrendon MenezesBelum ada peringkat
- Sheet1 - FullDokumen5 halamanSheet1 - FullKarim FangaryBelum ada peringkat
- Trajectory - Tracking - of - A - Pneumatically - Driven - PDokumen6 halamanTrajectory - Tracking - of - A - Pneumatically - Driven - PQuyết Nguyễn CôngBelum ada peringkat
- Assignment 1Aaug-Dec 2019 MVDokumen5 halamanAssignment 1Aaug-Dec 2019 MVkamalBelum ada peringkat
- Assignment 1 ADVANCED CONTROL 48580-Spring 2010Dokumen9 halamanAssignment 1 ADVANCED CONTROL 48580-Spring 2010auuser2011Belum ada peringkat
- Solved Problems in VibrationDokumen57 halamanSolved Problems in VibrationRasikaPereraBelum ada peringkat
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11Dari EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11Belum ada peringkat
- Mathematical Modeling of Systems: TextbookDokumen3 halamanMathematical Modeling of Systems: TextbookramBelum ada peringkat
- Random VibrationsDokumen20 halamanRandom VibrationsVivek PandeyBelum ada peringkat
- Tutorial 1Dokumen5 halamanTutorial 1Amir Chip100% (1)
- ME72 Assignment QuestionsDokumen6 halamanME72 Assignment QuestionsrahulBelum ada peringkat
- Lab 4 Mass-Spring System - v3Dokumen13 halamanLab 4 Mass-Spring System - v3sairafiBelum ada peringkat
- Acs 2019s1 Assn1Dokumen5 halamanAcs 2019s1 Assn1MiraelBelum ada peringkat
- Lecture 1 Mechanical VibrationsDokumen6 halamanLecture 1 Mechanical VibrationsRogelioB.AlobIIBelum ada peringkat
- 5826Dokumen6 halaman5826zubbbuBelum ada peringkat
- d1) 2DOF (Rev1)Dokumen44 halamand1) 2DOF (Rev1)chocsoftwareBelum ada peringkat
- Experiment 2Dokumen8 halamanExperiment 2Usama NadeemBelum ada peringkat
- Assignment 4 Due Oct 4 4pm 2019Dokumen3 halamanAssignment 4 Due Oct 4 4pm 2019bobBelum ada peringkat
- Phasor Analysis of Mechanical Systems Rev B PDFDokumen6 halamanPhasor Analysis of Mechanical Systems Rev B PDFBjørn-Magnus MoslåttBelum ada peringkat
- Dfig Book PDFDokumen29 halamanDfig Book PDFSrinivasan PurushothamanBelum ada peringkat
- Exam 20170130 WithsolutionDokumen19 halamanExam 20170130 WithsolutionDhanush YoganandhanBelum ada peringkat
- To Whomsoever It May ConcernDokumen1 halamanTo Whomsoever It May ConcerndhruvitshahBelum ada peringkat
- To Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDokumen1 halamanTo Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDarshan C ReddyBelum ada peringkat
- Work Exp CertificateDokumen1 halamanWork Exp CertificateJagadeesh KundrapuBelum ada peringkat
- To Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDokumen1 halamanTo Whom It May Concern: During The Period of His Assignment, We Found Him Sincere, Hardworking and A Keen LearnerDarshan C ReddyBelum ada peringkat
- Aboutفا Arithmetic Operators.helpDokumen9 halamanAboutفا Arithmetic Operators.helpUrdu SahafatBelum ada peringkat
- The Nie RajaDokumen1 halamanThe Nie RajaChandra SekarBelum ada peringkat
- Experience CertificateDokumen1 halamanExperience CertificateChandra SekarBelum ada peringkat
- Ravishankar PackersDokumen1 halamanRavishankar PackersChandra SekarBelum ada peringkat
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Dokumen3 halamanParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarBelum ada peringkat
- RamDokumen1 halamanRamChandra SekarBelum ada peringkat
- SubharamaniyanDokumen1 halamanSubharamaniyanChandra SekarBelum ada peringkat
- MuruganDokumen1 halamanMuruganChandra SekarBelum ada peringkat
- Sent Hil KumarDokumen1 halamanSent Hil KumarChandra SekarBelum ada peringkat
- Selvam Packers & Movers: 130, Narayanan Nagar, Salem - 636008Dokumen1 halamanSelvam Packers & Movers: 130, Narayanan Nagar, Salem - 636008Chandra SekarBelum ada peringkat
- ShankarDokumen1 halamanShankarChandra SekarBelum ada peringkat
- Log in SheetDokumen2 halamanLog in SheetChandra SekarBelum ada peringkat
- Ramani Packers & Movers: 4 Roads, Omalur Main Road, Salem - 636007Dokumen2 halamanRamani Packers & Movers: 4 Roads, Omalur Main Road, Salem - 636007Chandra SekarBelum ada peringkat
- Played For Namakkal District As A Volley Ball Player HobbiesDokumen2 halamanPlayed For Namakkal District As A Volley Ball Player HobbiesChandra SekarBelum ada peringkat
- Log in SheetDokumen2 halamanLog in SheetChandra SekarBelum ada peringkat
- Synopsis Introduction To Press Tools and Power Press Pneumatic SystemsDokumen1 halamanSynopsis Introduction To Press Tools and Power Press Pneumatic SystemsChandra SekarBelum ada peringkat
- RajaDokumen4 halamanRajaChandra SekarBelum ada peringkat
- VasuDokumen1 halamanVasuChandra SekarBelum ada peringkat
- ABSTRACTDokumen1 halamanABSTRACTChandra SekarBelum ada peringkat
- Gear Cutting Attachment For Small Lathes 209Dokumen2 halamanGear Cutting Attachment For Small Lathes 209Chandra SekarBelum ada peringkat
- S.N O. Material Price/Ton in Rs. First Look: Propriet orDokumen2 halamanS.N O. Material Price/Ton in Rs. First Look: Propriet orChandra SekarBelum ada peringkat
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Dokumen3 halamanParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarBelum ada peringkat
- Paramveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Dokumen3 halamanParamveer Polytechnic College Pauparapatti: PROJECT REPORT 2014-2015Chandra SekarBelum ada peringkat
- Accident AlertDokumen35 halamanAccident AlertChandra SekarBelum ada peringkat
- A4.fabrication of Solar Fan.Dokumen2 halamanA4.fabrication of Solar Fan.Chandra SekarBelum ada peringkat
- Et0077 Fabricationofsolaroperatedpneumaticreciprocatingwaterpumpingsystem 131231213315 Phpapp01Dokumen78 halamanEt0077 Fabricationofsolaroperatedpneumaticreciprocatingwaterpumpingsystem 131231213315 Phpapp01Chandra SekarBelum ada peringkat
- P P Savani CFE Physics: Date: 22/02/23Dokumen15 halamanP P Savani CFE Physics: Date: 22/02/23Mantavya MeghaniBelum ada peringkat
- Vectors in MechanicsDokumen33 halamanVectors in MechanicsMukyBelum ada peringkat
- Internship Report Heat ExchangerDokumen36 halamanInternship Report Heat ExchangerWorld Statistics Analysis100% (1)
- De BrouglieDokumen6 halamanDe BrouglieJiezel CastorBelum ada peringkat
- Module Wave 2020Dokumen22 halamanModule Wave 2020Cart Kartika100% (1)
- The Radiant Time Series Cooling Load Calculation ProcedureDokumen14 halamanThe Radiant Time Series Cooling Load Calculation ProcedureNor Firdaus Yunus100% (1)
- Impact - of - Jet Fluid MechanicsDokumen38 halamanImpact - of - Jet Fluid MechanicsM. Qasim ZiaBelum ada peringkat
- Assignment On Electromagnetic WavesDokumen5 halamanAssignment On Electromagnetic WavesAtharav GoyalBelum ada peringkat
- Oral RecitationDokumen2 halamanOral RecitationJERSON FULGENCIOBelum ada peringkat
- PHGN100 EquationSheetDokumen1 halamanPHGN100 EquationSheetSamuel BangapadangBelum ada peringkat
- Heat Diffusion EquationDokumen8 halamanHeat Diffusion EquationSrikar GhooliBelum ada peringkat
- Full NotesDokumen11 halamanFull NotesGodwinBelum ada peringkat
- Cot 3rd QTR ScienceDokumen37 halamanCot 3rd QTR ScienceJer Jac IpolanBelum ada peringkat
- Phy T1Dokumen23 halamanPhy T1SivaSaiBelum ada peringkat
- Lecture #2 - Sound LevelDokumen28 halamanLecture #2 - Sound LevelBalkidz Shah HunnyBelum ada peringkat
- Free and Forced Convection Lab ReportDokumen17 halamanFree and Forced Convection Lab ReportKamal GamalBelum ada peringkat
- 4 Waves: 4.1 OscillationsDokumen104 halaman4 Waves: 4.1 OscillationsEmad ChowdhuryBelum ada peringkat
- Thermal KineticsDokumen37 halamanThermal KineticsgowthamiBelum ada peringkat
- Exp 6 Free & Forced Convection Heat ExchangerDokumen19 halamanExp 6 Free & Forced Convection Heat ExchangerGriezmann Haziq50% (2)
- Upcat Reviewer PhysicsDokumen7 halamanUpcat Reviewer PhysicsRogelio EscobarBelum ada peringkat
- Q3 - Week 3 - Science 6 - FinalDokumen4 halamanQ3 - Week 3 - Science 6 - FinalJoy Carol MolinaBelum ada peringkat
- Monday 1 June 2020: PhysicsDokumen28 halamanMonday 1 June 2020: PhysicsArda TürkerBelum ada peringkat
- Undulating RelativityDokumen184 halamanUndulating RelativityAlfredo Dimas Moreira GarciaBelum ada peringkat
- Forces Acting On Gravity DamsDokumen6 halamanForces Acting On Gravity DamsRama Sagar Naik100% (2)
- Room Acoustics B&K PDFDokumen44 halamanRoom Acoustics B&K PDFconcord1103Belum ada peringkat
- Sub-6 GHZ Antenna GuideDokumen9 halamanSub-6 GHZ Antenna GuideRAJNI AGERIABelum ada peringkat
- Tut Test 2 MemoDokumen8 halamanTut Test 2 MemoVogelBelum ada peringkat
- RST PDokumen11 halamanRST PHamid JamilBelum ada peringkat
- Circular Motion Test I 08-08-2021Dokumen10 halamanCircular Motion Test I 08-08-2021Suchay SawardekarBelum ada peringkat
- SPM 2017 Paper 2Dokumen60 halamanSPM 2017 Paper 2Srikanth SagardevanBelum ada peringkat