Anda mungkin juga menyukai
- 01 ANSYS FLUENT Tutorial - Position Dependent Porous Media PDFDokumen8 halaman01 ANSYS FLUENT Tutorial - Position Dependent Porous Media PDFmrpcu0% (1)
- Report ModernizationDokumen16 halamanReport ModernizationmrpcuBelum ada peringkat
- Current Organic Chemistry, 2000, 4, 1-17Dokumen17 halamanCurrent Organic Chemistry, 2000, 4, 1-17mrpcuBelum ada peringkat
- GRE Quant Concepts FormulaeDokumen31 halamanGRE Quant Concepts Formulaeshaliniark100% (3)
- FemDokumen12 halamanFemmrpcuBelum ada peringkat
- VSG Article Desktop Eng SimulationDokumen9 halamanVSG Article Desktop Eng SimulationmrpcuBelum ada peringkat
- Installing The LCA Classic On WindowsDokumen27 halamanInstalling The LCA Classic On WindowsmrpcuBelum ada peringkat
- Mechanical Translational SystemsDokumen6 halamanMechanical Translational SystemsmrpcuBelum ada peringkat
- Homework 2 Che 111Dokumen1 halamanHomework 2 Che 111mrpcuBelum ada peringkat
- On Upstream Influence in Supersonic FlowsDokumen12 halamanOn Upstream Influence in Supersonic FlowsmrpcuBelum ada peringkat
- Geneva Atom Smasher Sets Collision RecordDokumen3 halamanGeneva Atom Smasher Sets Collision RecordmrpcuBelum ada peringkat
- Combustion of Methanol-Air MixtureDokumen3 halamanCombustion of Methanol-Air MixturemrpcuBelum ada peringkat
- Heisenberg S Uncertainty PrincipleDokumen19 halamanHeisenberg S Uncertainty PrincipleWai-Yen ChanBelum ada peringkat
- Decoherence ProblemDokumen6 halamanDecoherence ProblemmrpcuBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sperry Bombsight: A Pioneering Rival to NordenDokumen6 halamanThe Sperry Bombsight: A Pioneering Rival to NordenPaul DupontBelum ada peringkat
- Acsomega 9b01541Dokumen9 halamanAcsomega 9b01541Benedictus EduardoBelum ada peringkat
- CUCM Intracluster Port Usage GuideDokumen3 halamanCUCM Intracluster Port Usage GuideAbhinayMylavarapuBelum ada peringkat
- List of Linkages2016Dokumen74 halamanList of Linkages2016engrwho0% (1)
- Devoir 2 Arsalan 2SM BIOFDokumen3 halamanDevoir 2 Arsalan 2SM BIOFphytanjaBelum ada peringkat
- FGGDokumen12 halamanFGGSridharan VenkatBelum ada peringkat
- Consolidation: By. Rajesh S.GujarDokumen33 halamanConsolidation: By. Rajesh S.Gujardarshan_dave17Belum ada peringkat
- Feed Water and Boiler Water of Steam GeneratorsDokumen2 halamanFeed Water and Boiler Water of Steam GeneratorsIvicaT0% (2)
- VisiLogic Software Manual-LadderDokumen158 halamanVisiLogic Software Manual-LadderEduardo Vasquez CastroBelum ada peringkat
- Calgon Tech SpecDokumen4 halamanCalgon Tech SpecDanStratoBelum ada peringkat
- AASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageDokumen11 halamanAASHTO T283-22 Standard Method of Test for Resistance of Compacted Asphalt Mixtures to Moisture-Induced DamageErnesto Oscar VidelaBelum ada peringkat
- ZXONE Quick Installation Guide - V1.0Dokumen56 halamanZXONE Quick Installation Guide - V1.0kmad100% (2)
- 95 - 737-General-InformationDokumen3 halaman95 - 737-General-InformationffontanaBelum ada peringkat
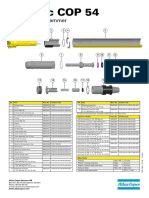
- 9853 1239 01 - COP 54 Service Poster - LOWDokumen1 halaman9853 1239 01 - COP 54 Service Poster - LOWValourdos LukasBelum ada peringkat
- Adaptive ArchitectureDokumen27 halamanAdaptive ArchitectureSanjeev BumbBelum ada peringkat
- Sru Flow DiagramDokumen1 halamanSru Flow Diagrampppppp5Belum ada peringkat
- Testing Machines For TextilesDokumen35 halamanTesting Machines For TextilesAmarech YigezuBelum ada peringkat
- Compact 1NC+1NO limit switch data sheetDokumen2 halamanCompact 1NC+1NO limit switch data sheetJose AkinoBelum ada peringkat
- Node diagnostics report for RBS6601WDokumen9 halamanNode diagnostics report for RBS6601WWilson DiazBelum ada peringkat
- JUS StandardsDokumen28 halamanJUS StandardsgarejkaBelum ada peringkat
- ESAB Welding HandbookDokumen31 halamanESAB Welding Handbookhooky1100% (4)
- Artificial LiftDokumen18 halamanArtificial LiftRasya RefanBelum ada peringkat
- Catalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Dokumen30 halamanCatalog Advantys AS-I IP20-IP67 - 803510 - DIA3ED2040909EN - 200408Jean MarzanBelum ada peringkat
- DMD Documentation Error - Freetronics ForumDokumen3 halamanDMD Documentation Error - Freetronics ForumapofviewBelum ada peringkat
- Melter / Applicators: Modern Cracksealing TechnologyDokumen16 halamanMelter / Applicators: Modern Cracksealing TechnologyEduardo RazerBelum ada peringkat
- Friction Factor For Turbulent Pipe Flow: January 2006Dokumen17 halamanFriction Factor For Turbulent Pipe Flow: January 2006John AnthoniBelum ada peringkat
- Siemens-Relee de Timp PDFDokumen2 halamanSiemens-Relee de Timp PDFChioibasNicolaeBelum ada peringkat
- Civil 3 8sem PDFDokumen43 halamanCivil 3 8sem PDFG0utham100% (1)
- Control Fixed Bed ReactorsDokumen4 halamanControl Fixed Bed ReactorsAddison JuttieBelum ada peringkat
- List of Projects Related To Transportation Highway and BridgesDokumen5 halamanList of Projects Related To Transportation Highway and BridgesOyedotun TundeBelum ada peringkat