Anda mungkin juga menyukai
- Mobile Robot: Unlocking the Visionary Potential of Mobile RobotsDari EverandMobile Robot: Unlocking the Visionary Potential of Mobile RobotsBelum ada peringkat
- The Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"Dari EverandThe Age of Machines: A Comprehensive Overview of Robotics and Automation Technology"Belum ada peringkat
- Land Mine Detecting Robot Capable of Path PlanningLand Mine Detecting Robot Capable of Path PlanningDokumen10 halamanLand Mine Detecting Robot Capable of Path PlanningLand Mine Detecting Robot Capable of Path Planningzubairaw100% (1)
- Hexapod Robot For Detecting Landmines With SILO6 As Baseline, During War ActionsDokumen6 halamanHexapod Robot For Detecting Landmines With SILO6 As Baseline, During War Actionsanon_933015100% (1)
- MULTIPURPOSE ROBO OprationDokumen7 halamanMULTIPURPOSE ROBO OprationDinesh DineshBelum ada peringkat
- Autonomus Mobile RobotDokumen19 halamanAutonomus Mobile Robotapi-268716430% (1)
- Soft Copy On RoboticsDokumen18 halamanSoft Copy On RoboticsRaghavendra RaghavBelum ada peringkat
- Basic Robotics by BalamuruganDokumen28 halamanBasic Robotics by BalamuruganBalamurugan Thirunavukarasu100% (1)
- Unmanned Groun F Vehicle For Military PurposesDokumen6 halamanUnmanned Groun F Vehicle For Military PurposesNikhil BhavsarBelum ada peringkat
- Vidyalankar Polytechnic: Program:Information TechnologyDokumen11 halamanVidyalankar Polytechnic: Program:Information TechnologySachin UgaleBelum ada peringkat
- Manoharbhai Patel Institute of Engineering and Technology, GondiaDokumen20 halamanManoharbhai Patel Institute of Engineering and Technology, GondiaRavi JoshiBelum ada peringkat
- Metal Detecting RobotDokumen51 halamanMetal Detecting RobotBariq MohammadBelum ada peringkat
- Design and Development of Floor Cleaner Robot (Automatic and Manual)Dokumen7 halamanDesign and Development of Floor Cleaner Robot (Automatic and Manual)Manoj KavediaBelum ada peringkat
- Obstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerDokumen5 halamanObstacle Avoidance Robotic Vehicle Using Ultrasonic Sensor and Arduino MicrocontrollerkentBelum ada peringkat
- Under The Guidance of Mr. Pankaj Chawla HOD Electrical DeptDokumen21 halamanUnder The Guidance of Mr. Pankaj Chawla HOD Electrical DeptHorvat NorbertBelum ada peringkat
- Project Report On Obstacle Avoiding RobotDokumen8 halamanProject Report On Obstacle Avoiding RobotAmit Chakraborty50% (12)
- Project SynopsisDokumen36 halamanProject SynopsisgopalysgBelum ada peringkat
- Landmines Detecting RobotDokumen8 halamanLandmines Detecting Robotحمود الاشولBelum ada peringkat
- Solar Powered-Autonomous Arduino Based Rescue Robot: A Design To Promote An On-Time Disaster ReliefDokumen3 halamanSolar Powered-Autonomous Arduino Based Rescue Robot: A Design To Promote An On-Time Disaster ReliefDranrave Matubis BugasBelum ada peringkat
- Distance Controlled Rescue and Security Mobile RobotDokumen6 halamanDistance Controlled Rescue and Security Mobile Robotmidhuna94Belum ada peringkat
- Autonomous Cleaning RobotDokumen4 halamanAutonomous Cleaning RobotAakash SheelvantBelum ada peringkat
- Trashbot - Trash Collecting Robot With Iot TechnologyDokumen19 halamanTrashbot - Trash Collecting Robot With Iot Technologyimran kadriBelum ada peringkat
- Obstacle Detection Robot PDFDokumen2 halamanObstacle Detection Robot PDFJenniferBelum ada peringkat
- Abstract - Border SecurityDokumen7 halamanAbstract - Border SecurityNikki NihalBelum ada peringkat
- Arduino Based Movable Robotic Arm: Team MembersDokumen9 halamanArduino Based Movable Robotic Arm: Team MembersKrishna VinodBelum ada peringkat
- Design of An Iot Based Autonomous Vehicle Using Computer VisionDokumen22 halamanDesign of An Iot Based Autonomous Vehicle Using Computer VisionyashBelum ada peringkat
- Design and Implementation of A Mini-Size Search Robot PDFDokumen4 halamanDesign and Implementation of A Mini-Size Search Robot PDFsrcembeddedBelum ada peringkat
- Robotics: Submitted byDokumen17 halamanRobotics: Submitted bySri VijayBelum ada peringkat
- Irjet V4i2326Dokumen4 halamanIrjet V4i2326Sabin SabuBelum ada peringkat
- Rescue Robots: Presented by A.KRISHNA CHAITHANYA (18701A0457)Dokumen28 halamanRescue Robots: Presented by A.KRISHNA CHAITHANYA (18701A0457)Krishna ChaithanyaBelum ada peringkat
- 504 - Swachh Abhiyan - Door-to-Door Pickup of Household Hazardous WasteDokumen11 halaman504 - Swachh Abhiyan - Door-to-Door Pickup of Household Hazardous WasteSrideviBelum ada peringkat
- Intelligent Robot AssistedDokumen10 halamanIntelligent Robot AssistedselvijeganBelum ada peringkat
- Microcontroller Based Line Follower Robot: Microtronics TechnologiesDokumen5 halamanMicrocontroller Based Line Follower Robot: Microtronics TechnologiesKimiBelum ada peringkat
- Project Report FinalDokumen69 halamanProject Report Finalrohitsaini2383% (6)
- An Autonomous Robot Based On A WheelchairDokumen3 halamanAn Autonomous Robot Based On A WheelchairsrcembeddedBelum ada peringkat
- PrahiDokumen5 halamanPrahiDindukurthy PrahithaBelum ada peringkat
- Key Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCDokumen17 halamanKey Words - Arduino UNO, Motor Shield L293d, Ultrasonic Sensor HC-SR04, DCBîswãjït NãyàkBelum ada peringkat
- Theory Background of The SystemDokumen10 halamanTheory Background of The SystemMoniBelum ada peringkat
- Q2. What Is Robot? What Are The Laws of Robot?Dokumen5 halamanQ2. What Is Robot? What Are The Laws of Robot?Ashikur RahmanBelum ada peringkat
- Utr SynopsisDokumen4 halamanUtr SynopsisDamodar PatilBelum ada peringkat
- Social Distancing Monitoring Robot For QueueDokumen2 halamanSocial Distancing Monitoring Robot For QueueNationalinstituteDsnrBelum ada peringkat
- Advanced Military Spying & Bomb Disposal RobotDokumen4 halamanAdvanced Military Spying & Bomb Disposal RobotothmanBelum ada peringkat
- Distance Controlled Rescue and Security Mobile RobotDokumen6 halamanDistance Controlled Rescue and Security Mobile Robotmasud1470Belum ada peringkat
- Obstacle Avoiding Robot ProjctDokumen4 halamanObstacle Avoiding Robot ProjctAmrita BiswasBelum ada peringkat
- Alive human-IEEE PDFDokumen5 halamanAlive human-IEEE PDFmerrinBelum ada peringkat
- Technical Answers For Real World Problems (TARP) : Review-3 Autonomous Waste Management RobotDokumen17 halamanTechnical Answers For Real World Problems (TARP) : Review-3 Autonomous Waste Management RobotLuckyDon 1999Belum ada peringkat
- House Cleaning Robot: Digital Assignment - I Iot System ArchitectureDokumen6 halamanHouse Cleaning Robot: Digital Assignment - I Iot System Architecturescanning &Belum ada peringkat
- Human Following RobotDokumen11 halamanHuman Following RobotPrajwal ShivareddyBelum ada peringkat
- Smart Floor Cleanng RobotDokumen77 halamanSmart Floor Cleanng RobotGagneet KaurBelum ada peringkat
- Human Following RobotDokumen19 halamanHuman Following Robot54 YOGESHWARAN RBelum ada peringkat
- 16 Robotics Visions Warm Intelligence Traffic SafetyDokumen9 halaman16 Robotics Visions Warm Intelligence Traffic SafetygeethroseBelum ada peringkat
- 10 Things We Couldn RobotsDokumen7 halaman10 Things We Couldn RobotsRaul Alberto Flores MotaBelum ada peringkat
- Obstacle Avoidance MobotDokumen22 halamanObstacle Avoidance MobotjerryguzmanBelum ada peringkat
- Pick and Place RobotsDokumen16 halamanPick and Place RobotssvishalnBelum ada peringkat
- AbhishekDokumen13 halamanAbhishekAbhishek ChettyBelum ada peringkat
- Design and Manufacturing of A Prototype Multipurpose Robot Capable of Military ActionDokumen6 halamanDesign and Manufacturing of A Prototype Multipurpose Robot Capable of Military ActionInternational Journal of Application or Innovation in Engineering & ManagementBelum ada peringkat
- Application of Robotics in Mining IndustryDokumen5 halamanApplication of Robotics in Mining IndustryalfavectorBelum ada peringkat
- Multifuntioning RobotDokumen139 halamanMultifuntioning RobotshamstouhidBelum ada peringkat
- Etm RKDokumen10 halamanEtm RKsamirgaurave5Belum ada peringkat
- "A Multipurpose Robot For Military" - Tribute To The Defence MinistryDokumen4 halaman"A Multipurpose Robot For Military" - Tribute To The Defence MinistryImran KhanBelum ada peringkat
- Low Power rc5 Cipher For Zigbee Portable Biomedical Systems PDFDokumen3 halamanLow Power rc5 Cipher For Zigbee Portable Biomedical Systems PDFsrcembeddedBelum ada peringkat
- Digital Control For Home Lighting Systems With Zigbee Communication PDFDokumen4 halamanDigital Control For Home Lighting Systems With Zigbee Communication PDFsrcembeddedBelum ada peringkat
- ZigBee Based Energy Efficient Outdoor Lighting Control System PDFDokumen4 halamanZigBee Based Energy Efficient Outdoor Lighting Control System PDFsrcembeddedBelum ada peringkat
- Real Time Paddy Crop Field Monitoring Using Zigbee Network PDFDokumen4 halamanReal Time Paddy Crop Field Monitoring Using Zigbee Network PDFsrcembeddedBelum ada peringkat
- Identification of Missing Objects With Group Coding of RF Tags PDFDokumen3 halamanIdentification of Missing Objects With Group Coding of RF Tags PDFsrcembeddedBelum ada peringkat
- Low Cost Weather Station With Remote Control PDFDokumen4 halamanLow Cost Weather Station With Remote Control PDFsrcembeddedBelum ada peringkat
- A Wireless Surveillance and Safety System For Mine Workers Based On ZigbeeDokumen4 halamanA Wireless Surveillance and Safety System For Mine Workers Based On ZigbeesrcembeddedBelum ada peringkat
- Measurement and Control System of Soil Moisture of Large Greenhouse Group Based On Double Can Bus PDFDokumen3 halamanMeasurement and Control System of Soil Moisture of Large Greenhouse Group Based On Double Can Bus PDFsrcembeddedBelum ada peringkat
- Implementation of CAN Bus in An Autonomous All-Terrain Vehicle PDFDokumen4 halamanImplementation of CAN Bus in An Autonomous All-Terrain Vehicle PDFsrcembedded100% (1)
- Building Lighting Automation Through The Integration of DALI With Wireless Sensor Networks PDFDokumen4 halamanBuilding Lighting Automation Through The Integration of DALI With Wireless Sensor Networks PDFsrcembeddedBelum ada peringkat
- A Reconfigurable Snake Robot Based On Can-Bus: AbstractDokumen4 halamanA Reconfigurable Snake Robot Based On Can-Bus: AbstractsrcembeddedBelum ada peringkat
- Wireless Sensor Network Based Home Monitoring System For Wellness Determination of Elderly PDFDokumen4 halamanWireless Sensor Network Based Home Monitoring System For Wellness Determination of Elderly PDFsrcembeddedBelum ada peringkat
- Study On The Embedded CAN Bus Control System in The Vehicle PDFDokumen4 halamanStudy On The Embedded CAN Bus Control System in The Vehicle PDFsrcembeddedBelum ada peringkat
- Multiple-Target Tracking For Intelligent Headlights Control: AbstractDokumen3 halamanMultiple-Target Tracking For Intelligent Headlights Control: AbstractsrcembeddedBelum ada peringkat
- Ethernet Enabled Digital I/O Control in Embedded Systems: AbstractDokumen2 halamanEthernet Enabled Digital I/O Control in Embedded Systems: AbstractsrcembeddedBelum ada peringkat
- The House Intelligent Switch Control Network Based On Can Bus PDFDokumen3 halamanThe House Intelligent Switch Control Network Based On Can Bus PDFsrcembeddedBelum ada peringkat
- Overcurrent ProtectionDokumen61 halamanOvercurrent ProtectionHuzaifa WasimBelum ada peringkat
- Lecture 2.2.4 StringsDokumen12 halamanLecture 2.2.4 Stringssiyalohia8Belum ada peringkat
- Traning Report - 01914803618 - Ansh PuriDokumen111 halamanTraning Report - 01914803618 - Ansh PuriVansh puriBelum ada peringkat
- Colortrac S4e Service Manual-2Dokumen66 halamanColortrac S4e Service Manual-2hany_elbanna2000100% (1)
- Chapter TwoDokumen5 halamanChapter Twoshelter kofi anloadeyBelum ada peringkat
- Spring Batch Tutorial - Reading Information From A FileDokumen21 halamanSpring Batch Tutorial - Reading Information From A FileBala KulandaiBelum ada peringkat
- Pangasinan State University Urdaneta Campus Urdaneta CityDokumen11 halamanPangasinan State University Urdaneta Campus Urdaneta CityNephtali Pinos-anBelum ada peringkat
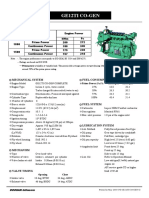
- Ge12ti Co Gen-GDokumen2 halamanGe12ti Co Gen-GTilok DasBelum ada peringkat
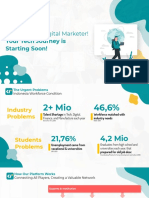
- Digital Marketing Batch 8Dokumen25 halamanDigital Marketing Batch 8Imron MashuriBelum ada peringkat
- Electromagnetic Compatibility PDFDokumen10 halamanElectromagnetic Compatibility PDFRedouane NaceriBelum ada peringkat
- Ir4570 Series PDFDokumen876 halamanIr4570 Series PDFHan SonBelum ada peringkat
- Complete Guide Binary Block ExpertsDokumen37 halamanComplete Guide Binary Block Expertswisdommensah0406100% (1)
- Digital Mastermind Playbook EN - v4 20190902Dokumen27 halamanDigital Mastermind Playbook EN - v4 20190902Pham Minh HoangBelum ada peringkat
- General Notes: Fourth Floor PlanDokumen1 halamanGeneral Notes: Fourth Floor PlanJuan IstilBelum ada peringkat
- User Manual Jofra DLC-155/158/159/ 187 /250/700: Dynamic Load CompensationDokumen23 halamanUser Manual Jofra DLC-155/158/159/ 187 /250/700: Dynamic Load Compensationsara kubikaBelum ada peringkat
- HTML FormDokumen5 halamanHTML Formshivam ashishBelum ada peringkat
- DTC P0171 System Too Lean (Bank 1) DTC P0172 System Too Rich (Bank 1)Dokumen14 halamanDTC P0171 System Too Lean (Bank 1) DTC P0172 System Too Rich (Bank 1)Willie AustineBelum ada peringkat
- Training Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery GuidelineDokumen10 halamanTraining Manual: TOTAL STATION Handling Guideline: Traverse and Detailing Summery Guidelinenilmo surveyorsBelum ada peringkat
- RTN 300 TrainingDokumen21 halamanRTN 300 TrainingJim Jr . OyolaBelum ada peringkat
- OxBlue Enhanced Security Monitoring Brochure 0 01Dokumen3 halamanOxBlue Enhanced Security Monitoring Brochure 0 01jhBelum ada peringkat
- SLM 1453I: Operation and Application ManualDokumen51 halamanSLM 1453I: Operation and Application ManualBob Chestnut100% (1)
- Product Highlights: All Gigabit PortsDokumen5 halamanProduct Highlights: All Gigabit Portssaumal20Belum ada peringkat
- Nursing Information System Team Information TechnologyDokumen8 halamanNursing Information System Team Information TechnologyCzarina Mae Quinones TadeoBelum ada peringkat
- Compare ISO 9001 AS9100cDokumen1 halamanCompare ISO 9001 AS9100cViswanathan Srk100% (1)
- Key Responsibility AreasDokumen6 halamanKey Responsibility AreasSubodh YadavBelum ada peringkat
- ZAPI AC-1 ManualDokumen62 halamanZAPI AC-1 ManualMarcos Gregorio da SilvaBelum ada peringkat
- BAJA RULES 2020 Rev B 2020-01-26Dokumen129 halamanBAJA RULES 2020 Rev B 2020-01-26baja100% (2)
- Lab ManualDokumen10 halamanLab ManualtheBelum ada peringkat
- Chiller Selection & District Cooling 7Dokumen7 halamanChiller Selection & District Cooling 7Marzook50% (2)
- M1 Section 1. Assignment 1 Metacognitive Reading ReportDokumen2 halamanM1 Section 1. Assignment 1 Metacognitive Reading ReportLandThere100% (1)