Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Piezoelectric Actuators and Generators FDokumen189 halamanPiezoelectric Actuators and Generators FJesusBelum ada peringkat
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Branner Kim-Dongil ProposalDokumen20 halamanBranner Kim-Dongil ProposalJesusBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Design and Construction of A ThermoacousDokumen7 halamanDesign and Construction of A ThermoacousJesusBelum ada peringkat
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Manual Camera 8000Dokumen122 halamanManual Camera 8000Amr KishkBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- InTech-Suitable Reverberation Criteria For Distant Talking Speech RecognitionDokumen17 halamanInTech-Suitable Reverberation Criteria For Distant Talking Speech RecognitionJesusBelum ada peringkat
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- InTech-Noise Sources in The City Characterization and Management TrendsDokumen25 halamanInTech-Noise Sources in The City Characterization and Management TrendsJesusBelum ada peringkat
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- InTech-Multi Channel Feature Enhancement For Robust Speech RecognitionDokumen27 halamanInTech-Multi Channel Feature Enhancement For Robust Speech RecognitionJesusBelum ada peringkat
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Wittig Reaction Formal Lab ReportDokumen7 halamanThe Wittig Reaction Formal Lab ReportJason Chen50% (2)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Stainless Steel PricelistDokumen28 halamanStainless Steel Pricelistmanish422Belum ada peringkat
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- 545WKS 2 Building and Construction Provision of Facilities and SafetyDokumen68 halaman545WKS 2 Building and Construction Provision of Facilities and SafetyAlexBelum ada peringkat
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- History of Stainless SteelDokumen24 halamanHistory of Stainless SteelSaravanan KanagavelBelum ada peringkat
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Mechanics of Materials - Stress Risers in A Cantilever Flexure TestDokumen20 halamanMechanics of Materials - Stress Risers in A Cantilever Flexure TestDavid Clark100% (1)
- The Relational ModelDokumen58 halamanThe Relational ModelIzza NasirBelum ada peringkat
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Future of The Internet: English Written TestDokumen4 halamanThe Future of The Internet: English Written TestCarlosBelum ada peringkat
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- 130 - Ceragon - IP-10G EMS Switch CFG - Presentation v1.3Dokumen18 halaman130 - Ceragon - IP-10G EMS Switch CFG - Presentation v1.3mehdi_mehdiBelum ada peringkat
- Bridge Scoping Cost Estimate WorksheetDokumen1 halamanBridge Scoping Cost Estimate WorksheetPhil MarceloBelum ada peringkat
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Sap GRCDokumen8 halamanSap GRCrajesh.sapBelum ada peringkat
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- 9 KnegteringDokumen13 halaman9 KnegteringMohammad Reza AnghaeiBelum ada peringkat
- Rubber Insulating Sleeves: Standard Specification ForDokumen10 halamanRubber Insulating Sleeves: Standard Specification ForPavan KumarBelum ada peringkat
- Sediment Design GuideDokumen239 halamanSediment Design GuidevanjadamjanovicBelum ada peringkat
- Civil Engineering Laboratory DSTDokumen6 halamanCivil Engineering Laboratory DSTJuhil ZalavadiyaBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Innovation in Motion: Miba Bearing GroupDokumen11 halamanInnovation in Motion: Miba Bearing GroupPaolo FerjančićBelum ada peringkat
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Performance Analyses of An Induction Motor Due To Specified Fault ConditionsDokumen5 halamanThe Performance Analyses of An Induction Motor Due To Specified Fault ConditionsAtilio Suàrez BardellineBelum ada peringkat
- LTE Uu Interface Protocol Stack With Comments PDFDokumen87 halamanLTE Uu Interface Protocol Stack With Comments PDFSoufiane Lamsaoueb100% (1)
- JFET AC Equivalent CircuitsDokumen42 halamanJFET AC Equivalent Circuitssakuntala barikBelum ada peringkat
- AHRI Standard 1230 - 2010 PDFDokumen184 halamanAHRI Standard 1230 - 2010 PDFDaud Simon ABelum ada peringkat
- 19 TeeDokumen12 halaman19 TeeamitBelum ada peringkat
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- T110C Jupiter Z Electrical 1Dokumen1 halamanT110C Jupiter Z Electrical 1Didik safdaliBelum ada peringkat
- C38 Mpa Type-IDokumen17 halamanC38 Mpa Type-IshahulBelum ada peringkat
- Rda5807sp Single-Chip Broadcast FM Radio Tuner PDFDokumen14 halamanRda5807sp Single-Chip Broadcast FM Radio Tuner PDFmorthred100% (1)
- Norma G8 - Cathodic DetachmentDokumen9 halamanNorma G8 - Cathodic DetachmentAlex ContrerasBelum ada peringkat
- Yamaha - RX v620 - HTR 5460 - RX v620rds 1 PDFDokumen84 halamanYamaha - RX v620 - HTR 5460 - RX v620rds 1 PDFLuis BarreirinhasBelum ada peringkat
- Material Safety Data SheetsDokumen30 halamanMaterial Safety Data SheetsUmesh BangaBelum ada peringkat
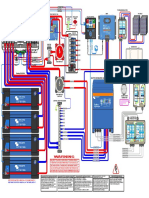
- Lynx Ion BMS Example With Quattro 8KW 24V 230VDokumen1 halamanLynx Ion BMS Example With Quattro 8KW 24V 230VAlba Car MarBelum ada peringkat
- Chapter 3-Radial Flow Into WellboreDokumen53 halamanChapter 3-Radial Flow Into WellboreArif MokhtarBelum ada peringkat
- Surface Finishing ProcessesDokumen32 halamanSurface Finishing ProcessesIqbal Singh SandhuBelum ada peringkat
- Navi-Conning 3000 (Version 4.01.00) - User Manual PDFDokumen56 halamanNavi-Conning 3000 (Version 4.01.00) - User Manual PDFDatu Mohd RedzwanBelum ada peringkat
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)