Real
Diunggah oleh
michimininoHak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Real
Diunggah oleh
michimininoHak Cipta:
Format Tersedia
UNIVERSIDAD NACIONAL MAYOR DE SAN MARCOS
FACULTAD DE CIENCIAS MATEM
ATICAS
ESCUELA ACAD
EMICO PROFESIONAL DE ESTAD
ISTICA
Trabajo de investicacion:
CONFLUENCIA DE LA INTEGRAL DE RIEMANN Y
LEBESGUE PARA EL C
ALCULO DE LA ESPERANZA
MATEM
ATICA
Desarrollado por:
Caballero Rodriguez Kenny
Ernau Huam an Jose
Marav Barrera Daniel
Rold an Escobedo Jordan
2
Indice general
Indice general 3
1. Introducci on 5
2. Antecedentes 7
2.1. Inicio . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2. Precedentes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1. Integral de Riemann . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2. Aportes de
Emile Borel . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.3. Por que una nueva integral? . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.3.1. Problemas que motivaron la creaci on de una nueva integral . . . . . 12
3. Integral de Lebesgue 15
3.1. Interpretacion geometrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2. Espacio de Medida . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.3. Integracion de funciones medibles . . . . . . . . . . . . . . . . . . . . . . . . 19
4. Teoria de la probabilidad 23
4.1. Espacio de probabilidad (, A, P) . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.1. Espacio Muestral . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.2. -algebra de eventos A . . . . . . . . . . . . . . . . . . . . . . . . . 23
4.1.3. Medida de Probabilidad P . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2. Conjuntos de Borel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.3. Funcion Medible [Variable Aleatoria] . . . . . . . . . . . . . . . . . . . . . . 25
4.4. Integraci on bajo densidades . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4.5. Tipos de variable aleatoria . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5.1. Variable aleatoria discreta . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5.2. Variable aleatoria continua . . . . . . . . . . . . . . . . . . . . . . . 30
4.5.3. Variable aleatoria mixta . . . . . . . . . . . . . . . . . . . . . . . . . 30
5. Esperanza Matematica 33
5.1. Esperanza Matematica de una Variable Aleatoria . . . . . . . . . . . . . . . 33
5.2. Esperanza Matematica de Variable Aleatoria Discreta . . . . . . . . . . . . 35
5.3. Esperanza Matematica de Variable Aleatoria Absolutamente Continua . . . 36
6. Conuencia 39
3
4
INDICE GENERAL
7. Aplicaciones 45
7.1. Covarianza de variables independientes . . . . . . . . . . . . . . . . . . . . . 45
7.2. Problema de la aguja de Buon . . . . . . . . . . . . . . . . . . . . . . . . . 45
Bibliografa 47
Captulo 1
Introduccion
La esperanza de una variable aleatoria, uno de los conceptos m as importantes y pode-
rosos de la teora estadstica, parecera tener dos deniciones distintas, dependiendo del
nivel academico en que sea vista. Por una parte, est a la denicion de un libro de texto
clasico de probabilidad como Mood et al. (1963. p. 69), en donde la esperanza de una
variable aleatoria continua est a dada por la siguiente expresi on: E(X) =
_
R
xf
X
(x)dx.
Sin embargo, la anterior denion diere tomada desde el punto de vista de la teora de
la medida. Por ejemplo, Shao (2003, p. 11) arma que la esperanza o valor esperado de
una variable aleatoria X est a dado por la siguiente expresi on: E(X) =
_
XdP donde P
es la medida de probabilidad del espacio de referencia (para cualquier variable aleatoria,
sea continua o discreta. El car acter de la integral, o sumatoria, los determinan la medida
del espacio de referencia).
Es claro que las dos deniciones no concuerdad a simple vista. En este manuscrito se aclara
por que, en efecto, las dos deniciones coinciden, de esta manera empezaremos por denir
la integral de Riemann y los aportes de
Emile Borel en la integral de Lebesgue, enseguida
plantearemos una gran pregunta Por que una nueva integral?. Una vez que se lea los
captulos anteriores se tendra la necesidad de denir, la integral de Lebesgue y la teora
de la probabilidad que se desarrollan en los captulos 4 y 5 de este manuscrito de forma
breve y concisa y nalmente podremos desarrollar y mostrar el n de este manuscrito con
el captulo de Esperanza Matematica.
5
6 CAP
ITULO 1. INTRODUCCI
ON
Captulo 2
Antecedentes
2.1. Inicio
Se podra decir que Lebesgue cre o la primera teora de integraci on genuina.
Varias deniciones, teoremas y ejemplos antecededieron al trabajo de Lebesgue, pero
carecan de la coherencia y completitud de una verdadera teora. A pesar de ello, estas
contribuciones anteriores prepararon el terreno para una mejorada teora de integraci on.
Concretamente, se observo la medida como punto de vista para la nueva integral y le
proveyeron con una buena cantidad de problemas teoricos descubiertos en el contexto de
la integral de Riemann . Ademas se podra decir que Lebesgue cre o la primera teora de
integraci on genuina.
2.2. Precedentes
2.2.1. Integral de Riemann
Podremos aproximar el area de una funcion f por rect angulos. Primero se divide el
intervalo [a; b] a un n umero nito de subintervalos [x
k1
; x
k
], donde 1 k n, cuyas
longitudes pueden ser distintas y con la unica condici on de que no se solapen:
a = x
0
< x
1
< x
2
< . . . < x
n1
< x
n
= b
Se dice que estos puntos constituyen una partici on. Inmediatamente se elige en cada
subintervalo un punto t
k
[x
k1
; x
k
], y se forma el rect angulo cuya base es el intervalo
[x
k1
; x
k
] y la altura ser a igual a f(t
k
); denamos x
k
= x
k
x
k1
.
Finalmente se forma la suma:
n
k=1
f(t
k
) x
k
Denicion:
Sea P={a = x
0
, x
1
, . . . , x
n
= b} una particon de [a; b] . Denimos la suma de Riemann
de f para la partici on P:
S(f, P) =
n
k=1
f(t
k
) x
k
7
8 CAP
ITULO 2. ANTECEDENTES
donde t
k
[x
k1
, x
k
], k = 1, 2, ..., n.
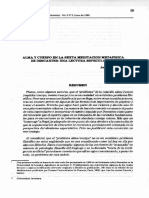
Figura 2.1: Sumas de Riemann
Observaci on 2.1. La suma de Riemann S(f, P) depende de la partici on P y de los
puntos (t
1
, t
2
, ..., t
n
), si S(f, P) tiende a un lmite cuando la partcion sea innitamente
na entonces el lmite se llama la integral de f(x) de a a b y se denota:
L =
_
b
a
f(x)dx
Se observa que si la altura f(x
k
) esta en el semiplano superior y en el inferior. Es decir
cuando f toma valores negativos y positivos:
S(f, P) =
n
k=1
f(t
k
) x
k
=
n
k=1
(f
+
(t
k
) f
(t
k
)) x
k
=
n
k=1
f
+
(t
k
)
n
k=1
f
(t
k
)) x
k
S(f, P) = S(f
+
, P) S(f
, P)
Denicion:
Dada una partici on P={a = x
0
, x
1
, x
2
, . . . , x
n
= b} del intervalo [a; b] y f(x) una
funcion de variable real denida y acotada en [a; b], denotamos:
m
k
= nf
x[x
k1
,x
k
]
f(x)
M
k
= sup
x[x
k1
,x
k
]
f(x)
Llamaremos suma inferior de la funcion f, respecto a la partici on P; cuyo valor es:
L(f, P) =
n
k=1
m
k
x
k
2.2. PRECEDENTES 9
Figura 2.2:
Area de f(x)
Llamaremos suma superior de la funcion f, respecto a la partici on P; cuyo valor es:
U(f, P) =
n
k=1
M
k
x
k
Figura 2.3: Suma inferior de f en [a; b] Figura 2.4: Suma superior de f en [a; b]
Observaci on 2.2. Dado que para todo t
k
[x
k1
, x
k
] es m
k
f(t
k
) M
k
, deducimos
que para toda suma de Riemann, S(f, P), de f para la partici on P es
L(f, P) S(f, P) U(f, P)
Para cada partici on hay una unica suma superior y otra inferior.
Sea f : [a; b] R acotada y P[a; b] el conjunto de todas las particiones del intervalo
[a; b] La integral superior de la funcion f sobre [a; b] esta denida por:
_
b
a
= U(f) = nf
PP[a;b]
U(P, f)
10 CAP
ITULO 2. ANTECEDENTES
La integral inferior de la funcion f sobre [a; b] esta denida por:
_
b
a
= L(f) = sup
PP[a;b]
L(P, f)
Denicion:
Sea f : [a; b] R acotada. Se dice que la funnci on f es integrable sobre [a; b] si:
_
b
a
= L(f) = U(f) =
_
b
a
Teorema 2.1 (Condicion de Riemann). Sea f : [a; b] R, una funcion acotada, entonces
las siguientes armaciones son equivalentes:
1. f es integrable sobre [a; b].
2. Para todo > 0 existe una partici on, P
P[a; b] tal que:
U(f, P) L(f, P) <
.
Teorema 2.2 (Convergencia de las sumas integrales). Sea f : [a; b] R una funcion
integrable, {P
n
} una sucesi on de particiones de [a; b] tal que { (P
n
)} 0 y S(f, P) una
suma de Riemann de f para la particion P
n
. Se verica entonces que:
lm
n
U(f, P) = lm
n
S(f, P) = lm
n
L(f, P) =
_
b
a
f(x)dx
Propiedades de la Integral de Riemann
i) Linealidad. Si f, g son integrables en [a; b] y , n umeros reales, se verica que la
funcion f +g, tambien es integrable en [a; b] y
_
b
a
(f(x) +g(x))dx =
_
b
a
f(x)dx +
_
b
a
g(x)dx.
ii) Conservacion del orden. Si f, g son integrables en [a; b] y f(x) g(x) para todo
x [a; b], entonces verica:
_
b
a
f(x)dx
_
b
a
g(x)dx
iii) Si f es integrable en [a; b], tambien |f| es integrable en [a; b] y se verica la desigual-
dad:
_
b
a
f(x)dx
_
b
a
f(x)dx
iv) El producto de funciones integrables Riemann, tambien es integrable Riemann.
2.2. PRECEDENTES 11
v) Aditividad respecto al intervalo. Sea a < c < b, una funcion f es integrable en [a; b]
s y s olo s, es integrable en [a; c] y en [c; b], el cual verica la igualdad:
_
b
a
f(x)dx =
_
c
a
f(x)dx +
_
b
c
f(x)dx
Teorema 2.3 (Primer teorema fundamental del calculo). Dada una funcion f integrable
sobre el intervalo [a, b], denimos F sobre [a, b] por
F(x) =
_
x
a
f =
_
x
a
f(t)dt.
Si f es continua en c [a, b], entonces F es derivable en c y F
(c) = f(c).
Teorema 2.4 (Segundo teorema fundamental del calculo). Dada una funcion f(x) conti-
nua en el intervalo [a, b] y sea F(x) cualquier funcion primitiva de f, es decir F
= f(x).
Entonces
_
b
a
f(x)dx = F(b) F(a).
2.2.2. Aportes de
Emile Borel
Borel reconoce que una denicion de medida s olo puede ser util si esta verica ciertas
propiedades fundamentales, se impuso estas propiedades a priori y las hemos emplea-
do para denir la clase de los cojuntos que hemos considerado como medibles. La idea
fundamental es establecer que propiedades son estrictamente indispensables para el razo-
namiento que se va a seguir.
Se establece las siguientes propiedades b asicas que debe cumplir una medida:
i) Una medida es siempre no negativa.
ii) La medida de la uni on numerable (o nita) disjunta de conjuntos debe ser igual a la
sumade las mdidas de dichos conjuntos.
iii) La medida de la diferencia entre dos conjuntos (un conjunto y un subconjunto suyo)
es igual a la diferencia de sus medidas.
iv) Todo conjunto de medida no nula no puede ser (ni nito ni) numerable.
A nadiendo que a los conjuntos para los cuales se pueda denir una medida que verique
las propiedades anteriores, les denominaremos conjuntos medibles.
Borel se planteo la cuesti on de construir una clase de conjuntos para los que se pudie-
ra denir una medida que vericara los postulados anteriores partiendo de la denicion
(antes mencionada) de la medida de los subconjuntos abiertos y acotados de la recta real,
y extendiendo la denicion de la medida a la clase de los conjuntos que se pueden obte-
ner a partir de los conjuntos abiertos por iteraci on indenida de las operaciones uni on
contable y diferencia de conjuntos. No obstante, Borel no llego a dar una descripcion
rigurosa de esta clase de conjuntos, que posteriormente establecera denitivamene Lees-
gue en 1902, denominandolos conjuntos B-medibles
2
que actualmente conocemos como
conjuntos de Borel o borelianos.
12 CAP
ITULO 2. ANTECEDENTES
2.3. Por que una nueva integral?
Para los matem aticos de nales del siglo XIX resulto claro que la integral de Riemann
tiene importantes limitaciones, por ejemplo su mal comportamiento con ciertos procesos
de convergencia.
Esta y otras limitaciones obligaron a realizar la contrucci on de nuevas
integrales.Entre estos intentos destacan los debidos a Jordan, Borel, Young y nalmente
el de Lebesgue, que resulto ser el m as exitoso.
Destacaremos las siguientes limitaciones:
1. El conjunto de funciones integrables es relativamente peque no: Hay funciones senci-
llas que no son integrables. Recuerdese por ejemplo que la funcion de Dirichlet, esto
es, la funcion, f : [0; 1] R.
f(x) =
_
0 Si x Q.
1 Si x R\Q.
no es integrable.
2. Su extension a varias variables tiene algunas dicultades.
Ambas limitaciones est an relacionadas en ampliar el concepto de medida a otros conjuntos
de n umeros reales no necesariamente intervalos y por extension a otros subconjuntos de
R
n
.Las cuestiones a resolver son varias:
Que conjuntos se pueden medir?, Como medirlos? , Que funciones se pueden integrar?
y como halla su integral?
2.3.1. Problemas que motivaron la creaci on de una nueva integral
La denicion generalizada de integral representa para Lebesgue solo el inicio y la parte
menos profunda de su aporte para la teora de integraci on.
Lo realmente importante en la teora de Lebesgue fue reconocerlo como una herramienta
analtica capaz de hacer frente a los problemas no resueltos que haban surgido a partir
de la anterior teora de integraci on.
La mayor motivacion de Lebesgue para desarrollar una generalizaci on fructfera fue el
resolver los problemas previos no resueltos.
Series trigonometricas y de Fourier e integracion termino a termino
El problema lo planteo Fourier en 1822: si una funcion F se puede representar como
una serie trigonometica, es esa serie la serie de Fourier de f?. Ademas c uando podemos
permitir integrar termino a termino una serie innita de funciones? Es decir, cuando es
cierto que:
_
b
a
_
n=1
u
n
(x)
_
=
n=1
__
b
a
u
n
(x)
_
?
Fourier asumio que la respuesta a esta ultima pregunta es siempre, y lo us o para probar
que la respuesta a la primera pregunta es s. Hacia nales del siglo XIX se desmostro que
2.3. POR QU
E UNA NUEVA INTEGRAL? 13
no se puede integrar termino a termino ni siquiera en el caso de series uniformemente aco-
tadas, precisamente porque f(x) =
n=1
u
n
(X) no tiene porque ser integrable Riemann; aun
as, se obtuvieron algunos resultados positivos aumentando las hip otesis, pero requeran
pruebas extremadamente largas. Estos desarrollos, sin embargo, allanaron el camino para
que Lebesgue probara elegantemente que se pueden intercambiar la integral y la suma
para cualquier serie uniformemente acotada de funciones integrables-Lebesgue. Y aplican-
do este resultado a la primera cuesti on, Lebesgue estuvo en posici on de armar la creencia
de Fourier de que la respuesta es siempre.
14 CAP
ITULO 2. ANTECEDENTES
Captulo 3
Integral de Lebesgue
Alguna vez Lebesgue escribi o:
Es claro que se debe iniciar partiendo [c;d] en lugar de
[a;b] ....
. En efecto, en contraposici on con la integral de Riemann,en la cual se inicia
partiendo el dominio de la funcion. Lebesgue propuso iniciar partiendo el rango de la
funcion que se desea integral. Podemos ilustrar la diferencia entre estos dos procedimientos
con una analoga propuesta por el mismo Lebesgue: si en un paquete se tienen billetes de
las siguiente denominaciones {0.10; 1; 0.50; 100; 20; 0.10; 2; 500; 20; 10; 100; 0.50},
de acuerdo con Riemann se contaran agrupando los primeros tres, despues los cuatro
siguientes y nalmente los ultimos cinco para obtener 1.60+122.10+630.50 = 754.20. Pero
de acuerdo con el procedimeinto propuesto por Lebesgue los contariamos agrup andolos de
acuerdo a sus valores, as 0.10x2+0.50x2+20x2+100x2+2+500+1+10 =754.20.
1
3.1. Interpretacion geometrica
Para denir la Integral de Riemann
_
b
a
f(x) dx tomamos siempre la partici on nita
(sub-divici on en un n umero nito de intervalos) [a, b] entonces la suma de Riemann es:
S(f, P) =
n
k=1
f(t
k
)(x
k
x
k1
) donde t
k
[x
k
, x
k1
].......(1)
La base de la suma de Riemann,(1),es la division del dominio de f(x).Ahora subdividamos
el recorrido de f(x), [m, M], donde :
m = nf
[a,b]
f(x), M = sup
[a,b]
f(x)
Sea:
y
0
=m ,y
1
,y
2
, . . . , y
k1
, y
k
,. . . . .y
n
=M ......(2)
una partici on de [m,M], y sea:
S
k
= {x | y
k1
f(x) < y
k
} ......(3)
1
Extrado de [6],pag. 17.
15
16 CAP
ITULO 3. INTEGRAL DE LEBESGUE
entonces se puede formar una suma parecida a (1):
S
L
(f) =
n
k=1
t
k
m(S
k
) donde t
k
[y
k
, y
k1
]......(4)
donde m(S
k
) es una medida (cualquier medida) del conjunto S
k
. El lmite de la suma
(4), cuando la partici on sea innitamente nita, podr a denir una integral.
Figura 3.1: Interpretacion geometrica
La medida m(S
k
), la cantidad que determina el tama no del conjunto S
k
, debe ser una
generalizaci on del concepto longitud del intervalo para que la integral sea una
generalizaci on de la integral de Riemann.
El estudio de la medida es indispensable para esta integral puesto que el conjunto S
k
ya
no es un intervalo; por lo tanto estudiarems, algunas nociones de la teora de la medida.
3.2. Espacio de Medida
En este captulo para hablar de un espacio de medida debemos denir dentro de este
conjunto un -algebra de conjuntos medibles y una funcion medida concreta que asigna
un valor real o medida a cada elemento de la -algebra.
Ejemplo:
1 La terna (R, B(R), ) donde es el conjunto de los n umeros reales, la -algebra bo-
reliana y la medida de Lebesgue basada en la longitud de los intervalos, constituyen
un espacio de medida.
2 Un espacio probabilstico es un caso particular de espacio de medida, donde todo
conjunto medible tiene una medida o tama nonito, dado por su probabilidad.
Denicion 3.1.
2
Sea X un conjunto, se dice que A P(X) es un -algebra si verica:
1. X A.
2. A A A
A.
2
Las deniciones,proposiciones y observaciones mostradas en esta seccion lo puede encontrar en el libro
[8] que esta en la bibliografa.
3.2. ESPACIO DE MEDIDA 17
3. A es cerraada por uniones numerables
3
, nita o no; es decir:
A
n
A
_
n1
A
n
A
Observaci on 3.1. A = P(X)
4
, es siempre un -algebra.
Denicion 3.2 (-algebra de Borel.). En R se dene la -algebra de Borel, B
R
como
aquella generada por los intervalos abiertos
B
R
= {(a, b) : a, b R, a < b}.
La denicion de B
R
tambien funciona con intervalos cerrados, semiabiertos o incluso
innitos como [a, ).
Denicion 3.3 (Funci on Medible). Diremos que f : X R, es A-medible si
aR
:
f
1
((a, )) = {x X : f(x) > a} A
Esta funcion nos servira mas adelante para denir la variable aleatoria en la teoria de la
probabilidad.
Observaci on 3.2. La denicion medible es equvalente a pedir que:
{x X : f(x) < b} A,
aR
,
{x X : f(x) a} A,
aR
,
{x X : f(x) b} A,
aR
,
{x X : a < f(x) < b} A,
a,bR
.
Observaci on 3.3. El conjunto de funciones medibles tiene estructura de espacio vec-
torial. Si dos funciones f y g son medibles, entonces su suma tambien es medible y lo
mismo ocurre en el producto, es decir f.g es medible. Si f : X R, es medible, entonces
se puede escribir:
f = f
+
f
,
con f
+
, f
funciones medibles positivas denidas por:
f
+
(x) =
_
f(x), sif(x) 0
0, sif(x) < 0
f
(x) =
_
0, sif(x) > 0
f(x), sif(x) 0
Dada f : X R, A-medible, la familia es un -algebra en R.
M
f
= {B R : f
1
(B) A}
Por lo tanto contiene al B
R
ya que (a, ) M
f
,
aR
por denicion.
3
es numerable o contable cuando sus elementos pueden ponerse en correspondencia uno a uno con el
conjunto de los n umeros naturales o un subconjunto nito del mismo.
4
Llamado el conjunto potencia.
18 CAP
ITULO 3. INTEGRAL DE LEBESGUE
Observaci on 3.4. Si f : X R es medible, entonces |f| es medible. El paso al lmite no
perturba la propiedad de ser medible, es decir si {f
n
} es una sucesi on de funciones medibles
entonces {f
n
} f convergencia puntual o casi todos los puntos (ctp)
5
, entonces f
es medible.
Denicion 3.4 (Medida). Dada una -algebra A en X, se dice que :A [0, ] es
una medida sobre A si se verican:
1. () = 0,
2. Para toda familia numerable {A
j
}
j1
de A cuyos elementos son disjuntos
dos a dos se tiene:
_
_
j1
A
j
_
_
=
j1
(A
j
)
Denicion 3.5 (Espacio de Medida). Llamaremos espacio de medida a toda terna (X, A , ).
Diremos que la media sobre A es nita si (X) < , y -nita si podemos
escribir:
X =
_
n1
X
n
con X
n
A y (X
n
) < .
Proposici on 3.1. Sea una medida sobre la -algebra A , entonces:
1.Si A,B A, tal que A , entonces (A) (A).Ademas si (B) < , se tiene
que:
(B/A) = (B) (A)
2.Si A
1
A
2
.... A
n
A
n+1
...., A
n
A, n, entonces :
_
_
_
j=1
A
j
_
_
= lm
j
(A
j
)
3.Si A
1
A
2
.... A
n
A
n+1
...., A
n
A, n,y (A
1
) < , entonces:
_
_
j=1
A
j
_
_
= lm
j
(A
j
)
Observaci on 3.5. Sea A un conjunto enumerable, entonces posee medida nula. Es decir
(A) = 0
5
Cuando una propiedad P se cumple en un conjunto X, excepto quiza en un subconjunto de X de
medida nula, se dice que la propiedad P se cumple en X en casi todos los puntos.
3.3. INTEGRACION DE FUNCIONES MEDIBLES 19
3.3. Integracion de funciones medibles
En teora de la medida, una funcion medible es aquella que preserva la estructura
entre dos espacios medibles. Formalmente, una funcion entre dos espacios medibles se dice
medible si la preimagen (tambien llamada imagen inversa) de cualquier conjunto medible
es a su vez medible.
6
Denicion 3.6 (Funci on caracterstica).
7
Dado un conjunto A, se dene la funcion
caracterstica de A como:
A
=
_
1, Si x A.
0, Si x / A.
Denicion 3.7 (Funci on simple). Dado un espacio de medida (X, A , ) se dice que :
X R, es una funcion simple si se puede escribir como combinaci on lineal nita de
funciones caracterstica de conjuntos de A, es decir:
=
n
j=1
c
j
A
j
,
donde c
j
R, A
j
A
Denicion 3.8. Sea f una funcion de Borel no negativa sobre (, A ).Entonces existe una
sucesi on de funciones simples {
n
} las cuales satisfacen que 0
1
2
...
n
g
y
lm
n
n
= g
Denicion 3.9 (Integral).
1. Para funciones simples tenemos
_
X
d =
n
j=1
c
j
(A
j
),
donde estamos suponiendo que (A
j
) < .
2. Para una funcion medible y positiva
_
X
fd = sup
__
X
d : 0 f
_
donde el supremo puede valer .
Se obsreva trivialmente que:
6
http://es.wikipedia.org/wiki/Funci on medible
7
Las deniciones,proposiciones, corolarios y observaciones mostradas en esta seccion lo puede encontrar
en el libro [8],[9],[10] y [5] que estan en la bibliografa.
20 CAP
ITULO 3. INTEGRAL DE LEBESGUE
a. Si f y g son simples, entonces:
_
(f +g)d =
_
fd +
_
gd.
b. Si f y g som edibles tales que 0 f g, entonces:
_
fd
_
gd.
c. f 0, entonces f = 0
_
fd
Ejemplo: Sea
Q
(x) =
_
1, x Q
0, cc
Por que no es Integrable Riemann?
Sean cuales sean [x
i1
, x
i
], el valor m aximo de f(x) en el intervalo es 1, y el mnimo es 0, ya
que por muy peque no que sea el intervalo, siempre habra n umeros racionales e irracionales
en su interior. De esta forma, el valor de las sumas superior e inferior de Riemann ser a:
L(f, P) = 0(x
1
x
0
) + 0(x
2
x
1
) +..... + 0(x
n
x
n1
) = 0
U(f, P) = 1(x
1
x
0
) + 1(x
2
x
1
) +..... + 1(x
n
x
n1
) = x
n
x
1
Esta situaci on se dar a sea cual sea la partici on P que se elija. Por tanto, la suma superior
y la inferior no se aproximan entre s, y el valor de la integral superior y de la integral
inferior ser a:
L(f, P) = 0 < U(f, P) = x
n
x
1
Al no ser iguales, la funcion no es Riemann-integrable.
Ahora veamos que es integrable seg un Lebesgue :
_
R
Q
(x)d = 1.(Q) + 0.(R \ Q) = 0,
Al ser Q un conjunto enumerable, entonces (Q) = 0.
Denicion 3.10. Sea A un conjunto medible y f una funcion de medible no negativa.
Se dene la integral de f sobre A como:
_
A
fdx =
_
I
A
(x)f(x)dx
3.3. INTEGRACION DE FUNCIONES MEDIBLES 21
Teorema 3.1 (Convergencia Monotona (TCM)). Sea f
1
, f
2
, f
3
.... una sucesi on de funcio-
nes de Borel sobre (, A , ).Si 0 f
1
f
2
... y ademaas lim
n
f
n
= f, entonces :
_
lm
n
f
n
d = lm
n
_
f
n
d
Corolario 3.1. Sea (g
i
)
i=1
es una sucesi on de funciones medibles y positivas, entonces
_
X
_
n=1
g
n
_
d =
n=1
__
X
g
n
_
d
Proposici on 3.2. Si f, g 0, medibles. Entonces
_
X
(f +g)d =
_
X
fd +
_
X
gd.
Teorema 3.2. Sea f : R R continua en I = [a, b] y f(x) = 0, si x / [a, b] y f es
lebesgue integrable. Entonces:
_
I
fd =
_
b
a
fdx
Teorema 3.3 (Teorema de Radon-Nikodym). Sea m la medida de Lebesgue. Si
X
es
absolutamente continua con respecto a m, entonces existe una funcion medible no negativa
f
X
: R R tal que:
X
(A) =
_
A
f
X
dm
Observaci on 3.6. Una situacion interesante, que nos ser a util posteriormente, es la
integraci on de funciones respecto de medidas discretas.Si es discreta su soporte D =
{
1
,
2
, ...} acumula toda la medida, de manera que (D
c
) = 0.En el supuesto que cada
i
sea medible, es decir, {
i
} A,
i
, para f no negativa tenemos
_
A
fd =
_
AD
fd , y
si tenemos en cuenta que D es numerable y que la integral es una medida,
_
A
fd =
i
AD
_
{
i
}
fd =
i
AD
f(
i
)({
i
}) (3.1)
Denicion 3.11. La integral de una funcion simple no negativa con respecto a la me-
dida esta dada por
_
d =
k
i=1
a
i
(A
i
) (3.2)
como caso particular, cuando la funcion simple de un s olo termino tal que a
1
=1, entonces
la integral de esta funcion cn respesto a la medida esta dada por:
_
I(A)d = (A) (3.3)
22 CAP
ITULO 3. INTEGRAL DE LEBESGUE
Teorema 3.4. Sea g una funcion de Borel, no negativa sobre un espacio de medida.
Entonces existe una sucesi on de funciones simples {f
X
n
} las cuales satisfacen que 0
1
2
...
n
g, entonces:
lm
n
n
= g
Captulo 4
Teoria de la probabilidad
La teora de la probabilidad es la parte de la matem atica que se encarga del estudio de
los fenomenos o experimentos aleatorios. Se entiende por experimento aleatorio todo aquel
experimento que sea posible de ser repetido indenidamente bajo condiciones esencialmen-
te invariantes, en el que se pueda describir todos los posibles resultados a un cuando no
sea posible establecer el que ser a el resultado en particular y que presente la propiedad de
regularidad estadstica
1
. Bajo estas circunstancias, la teora de la probabilidad tiene
el objetivo de modelar matem aticamente cualquier experimento aleatorio de interes.
4.1. Espacio de probabilidad (, A, P)
El modelo matem atico creado durante el primer tercio del siglo XX para estudiar los
experimentos aleatorios es el as llamado espacio de probabilidad. Este modelo consiste
de una terna ordenada, denotada usualmente por (, A, P), en donde es un conjunto
arbitrario, A es una -algebra de eventos de subconjuntos de , y P es una medida de
probabilidad denida sobre F. Explicamos a continuaci on brevemente cada uno de estos
elementos.
4.1.1. Espacio Muestral
El conjunto es llamado espacio muestral o espacio muestra cuyos elementos se
denomina eventos elementales (o puntos muestrales), y tiene como objetivo agrupar a
todos los posibles resultados del experimento aleatorio en cuesti on. Es de notar que a
no se le impone condici on alguna, excepto la condici on implcita de tener elementos.
4.1.2. -algebra de eventos A
Se dene la mnima -algebra generada por una coleccion de subconjuntos del espacio
muestral. Pero no es una coleccion cualquiera, sino una que satisface cierta estructura a
la cual denominaremos -algebra de eventos y que se dene de la siguiente manera:
1
mientras mas se repita el experimento la frecuencia relativa del resultado particular se estabiliza a u
n umero real entre 0 y 1
23
24 CAP
ITULO 4. TEORIA DE LA PROBABILIDAD
Denicion 4.1. Una colecccion A de subconjuntos de es una -algebra de eventos si
cumple las siguientes condiciones:
1. Si A A entonces A
c
A
2. A
3. Si A
1
, A
2
, ... A, entonces
n=1
A
n
A
En probabilidad elemental el conjunto denota el espacio muestral o conjunto de po-
sibles resultados de un experimento aleatorio, y los elementos de A representan eventos
en el experimento aleatorio. Una A es entonces una estructura que nos permite agrupar
ciertos subconjuntos de de interes, aquellos a los cuales se desea calcular su probabi-
lidad, y esta estructura constituye el dominio de denicion de una medida de probabilidad.
4.1.3. Medida de Probabilidad P
Hasta el momento sabemos que al par formado por y A se le denomina un Campo
de probabilidad y constituye parte del modelo.
Denicion 4.2. Una probabilidad P es una funcion que asigna a cada A A un n umero
real P(A). Llamado la probabilidad del evento A, tal que:
1. P(A) 0, paratodoA A
2. P() = 1
3. Si {A
n
} es una sucesion de eventos incompatibles(conjuntos disjuntos), entonces:
P
_
_
n=1
A
n
_
=
n
n=1
P(A
n
)
Entonces toda P denida sobre una A, con valores en el intervalo [0,1] y que cumpla los
tres postulados anteriores se le llama medida de probabilidad.
4.2. Conjuntos de Borel
Considere la coleccion de todos los intervalos abiertos (a,b) de R, en donde a b. A
la mnima algebra generada por esta coleccion se llama -algebra de Borel de R, y se
le denota por B(R).
Denicion 4.3 (-
ALGEBRA DE BOREL DE R).
B(R) = {(a, b) R : a b}
4.3. FUNCION MEDIBLE [VARIABLE ALEATORIA] 25
A los elementos de B(R) se les llama conjuntos de Borel, Borelianos o conjuntos Borel
medibles.De esta forma se puede asociar la -algebra B(R) al conjunto de n umeros reales,
y obtener as el espacio medible (R, B(R)).Se muestran a continuaci on algunos elementos
explcitos de esta -algebra.
Proposici on 4.1.
Para cualesquiera n umeros reales a b, los intervalos [a, b], (a, ), (, b), [a, b), (a, b]y{a},
son todos elementos de B(R).
Notaci on 4.1.
El conjunto de los n umeros reales va a ser representado por R.La familia de conjun-
tos Borel B(R) es un -algebra en los R.Hay que recalcar que B(R) es el m as peque no
-algebra perteneciente a los intervalos de los R.
4.3. Funcion Medible [Variable Aleatoria]
Una variable aleatoria es una funcion del espacio muestral en el conjunto de n umeros
reales que adem as satisface cierta condici on de medibilidad. Representa una traduccion de
cada uno de los resultados del espacio muestral en n umeros reales. Mediante una variable
aleatoria uno puede considerar que el posible experimento aleatorio en cuesti on no produce
como resultados elementos de sino n umeros reales. El concepto de variable aleatoria es
fundamental en la teora de la probabilidad, y una vez que enunciemos su denicion, el
termino aparecera con mucha frecuencia a lo largo del trabajo.
Denicion 4.4 (Funci on Medible).
Sean (, A) y (R, B(R)) espacios medibles y X : B(R) una aplicaci on. Diremos
que X es una variable aleatoria (v.a.), una funcioon medible (o una funcion
(A, B(R))-medible) tal que para cualquier Boreliano B se cumple que el conjunto
X
1
(B) A, B B(R)
Figura 4.1: funcion medible
Una variable aleatoria es una funcion de en R tal que la imagen inversa de cualquier
conjunto Boreliano es un elemento de la - algebra del espacio de probabilidad. Esta
26 CAP
ITULO 4. TEORIA DE LA PROBABILIDAD
condici on se conoce como medibilidad en teora de la medida, y se dice entonces que dicha
funcion es medible respecto de las - algebras A Y B(R).
Observaci on 4.1 (Variable Aleatoria). Dado un campo de probabilidad (, A) y una
funcion real valorada X cuyo dominio es espacio muestral () y cuyo recorrido (R
X
) es
un conjunto no vaco de n umeros reales, es decir X : R.
Se dice que una X es una variable aleatoria si para cada valor real de a, el conjunto de los
Figura 4.2: Variable aleatoria
eventos elementales; tal que X() a es un evento. Es decir, { X() a} A;
donde de forma practica se le denomina [X a] A para todo a real.
Explicaremos a continuaci on la raz on tecnica por la cual se le pide a una funcion
X : R que cumpla la condicion de medibilidad. Recordemos que P es una medida
de probabilidad denida sobre el espacio medible (, F). Si X es una variable aleatoria,
entonces podemos trasladar la medida de probabilidad P al espacio medible (R, B(R)) del
siguiente modo: Si B es un conjunto Boreliano denimos P
X
(B) = P(X
1
(B)), lo cual es
posible pues el conjunto X
1
(B) es un elemento de F, dominio de denicion de P.
La funcion P
X
: B(R) {0, 1} resulta ser una medida de probabilidad, y se le lla-
ma por tanto la medida de probabilidad inducida por la variable aleatoria.
Se le conoce tamben con el nombre de distribucion o ley de probabilidad de X.A menu-
do se le denota por F
X
. De este modo se contruye el espacio de probabilidad(R, B(R), F
X
).
Si B es un conjunto Boreliano, se usan los smbolos X
1
(B) y (X B) para denotar
el conjunto { : X() B}. Por ejemplo, el conjunto { : X() [0, )}
puede ser denotado por X
1
[0, )o(X[0, )), o simplemente por (X 0), incluyendo los
parentesis.
Veamos otro ejemplo, si (a, b) es un intervalo de la recta real, se puede usar el smbolo
X
1
(a, b), o (X (a, b)), o bien (a <X <b) para denotar el conjunto { : X() (a, b)}.
Para hacer la escritura m as corta, a menudo se omite el argumento de una variable X
y se omite tambien el termino variable aleatoria para X suponiendo, en la mayora de las
veces, que lo es.
4.3. FUNCION MEDIBLE [VARIABLE ALEATORIA] 27
Propiedades 4.1.
1. La funcion constante X = c es una variable aleatoria.
2. Si X es variable aleatoria y c es una constante, entonces cX tambien es variable
aleatoria.
3. Si X y Y son v.a.s, entonces X +Y es variable aleatoria.
4. Si X y Y son v.a.s, entoncesXY es variable aleatoria.
5. Si X y Y son v.a, entonces max {X, Y }
5. Sean X y Y v.a.s con Y = 0.Entonces X/Y es variable aleatoria.
6. Sean X y Y v.a.s, entonces max {X, Y } y mn{X, Y } tambien son variable
aleatoria.
7. Si X es variable aleatoria, entonces |X| es variable aleatoria.
Por lo comentado anteriormente en la denicion 10.2 tenemos la siguiente denicion:
Observaci on 4.2. Inducir probabilidades, como se habr a ya intuido, no es virtud exclusiva
de las variables aleatorias. A partir de cualquier aplicaci on medible f, entre (
1
, A
1
,
1
) y
(
2
, A
2
), podemos inducir una medida en el espacio imagen mediante una denion an aloga
a la anterior,
f
(A
2
) =
1
(f
1
(A
2
)), A
2
A
2
. (4.1)
Si f entre (
1
, A
1
,
1
) y (
2
, A
2
),es una aplicaci on medible, (4.1) nos permite inducir
sobre A
2
una medida. Si adem as g es una funcion medible denica sobre
2
, la composici on
g f ser a una funcion medible sobre
1
. La relaci on entre sus integrales respecto de
1
y
2
, respectivamente, se recoge en el siguiente teorema del cambio de variable.
Teorema 4.1 (Teorema del cambio de variable). Una funcion g es integrable en A
2
res-
pecto de
f
s y s olo s g f lo es en f
1
(A
2
) respecto de
1
, y en ese caso se verica
_
f
1
(A
2
)
g(f(
1
)d
1
=
_
A
2
g(
2
)d
f
. (4.2)
Si g es no negativa, este resultado es siempre cierto
Denicion 4.5 (Funci on de Distribucion). Una variable aleatoria X induce una medida
de probabilidad F
X
sobre R tal que:
F
X
= P X
1
= P(X
1
(A)) = P( : X() A)
Notece que el espacio de llegada de una variablee aleatoria puede ser medible y para dife-
rentes medidas. Sin embargo, existe s olo una medida de probabilidad que cumple la anterior
denici on y que esta ligada de forma estructural a la variable aleatoria. Como ilustraci on,
el siguiente diagrama muestra c omo la variable aleatoria X induce a la medida de proba-
bilidad F
X
.
X : (, B, P) (B, B(R), F
X
:= P X
1
)
28 CAP
ITULO 4. TEORIA DE LA PROBABILIDAD
Observaci on 4.3 (Funci on de distribucion).
Toda variable aleatoria esta asociada a una funcion de distribucion, la cual es de mucha
importacia.
Dados un espacio de probabilidad (, A , P), la funcion distribucion F
X
de una variable
aleatoria X, se dene como la probabilidad de un suceso de su respetiva variable aleatoria.
Siendo asi, F
X
: R [0; 1] denida como: F
X
(a) = P[X a].
Sea F
X
una funcion de distribucion, psee las siguientes propiedades:
1. Si a
1
a
1
, entonces F
X
(a
1
) F
X
(a
2
), es decir no decreciente.
2. Para toda funcion de distribucion F
X
se cumple:
lm
x
F
X
(a) = 1
3. Para toda funcion de distribucion F
X
se cumple:
lm
x
F
X
(a) = 0
4. Toda funcion de distribucion F
X
es continua por la derecha.
5 Dada una variable aleatoria X con funcion de distribucion F
X
, entonces:
a. P[a < X b] = F
X
(b) F
X
(a), para todo par de n umeros reales tal que a < b.
b. Para todo n umero real a
P[X = a] = F
X
(a) F
X
(a 0)
donde
F
X
(a 0) = lm
0
F
X
(a )
4.4. Integraci on bajo densidades
Las medidas de probabilidad poseen densidades respecto a la medida de Lebesgue. en
genera, dadas dos medidas de v y denidas sobre el mismo espaci de medida, decimos
que f es la densidad de v respecto de , si v(A) =
_
A
fd, A A, con f 0. Las in-
tegrales respecto de medidas ligdas a traves de una densidad guardan una sencilla relaci on.
Teorema 4.2. Si v posee una densidad f respecto de , una funcion g es integrable en A
respecto a v s y s olo s gf lo es respecto de , y en ese caso se verica
_
A
gd =
_
A
gfd (4.3)
Si g es no negativa este resultado es siempre cierto.
4.5. TIPOS DE VARIABLE ALEATORIA 29
4.5. Tipos de variable aleatoria
Las variables aleatorias se clasican en varios tipos dependiendo de las caractersticas
de la correspondiente funcion de distribucion. Existen tres tipos: discretas, continuas y
mixtas.
4.5.1. Variable aleatoria discreta
La variable aleatoria X se llama discreta si su correspondiente funcion de destribucion
F
X
es una funcion constante a pedazos, es decir su recorrido R
X
es numerable. Ademas,
en cada uno de sus puntos de este x
1
, x
2
, . . ., son de discontinuidad. En cada uno de estos
puntos se cumple P[X = x
i
] > 0. Existiendo asi una funcion p
X
, llamada funcion de
cuanta o funcion de densidad discreta, y se dene de la manera siguiente:
p
X
(x) =
_
P[X = x] Si x R
X
.
0 Si x / R
X
.
Figura 4.3: Variable aleatoria discreta
La cual cumple las siguientes condiciones
I. p
X
(x) 0, para todo x R
II.
n
p
X
(x
n
) = 1, Siendo R
X
= {x
1
, x
2
, . . . , x
n
, . . .}
III. F
X
(a) =
na
p
X
(x
n
).
El conjunto de pares de la forma (x
n
; p
X
(x)) recibe el nombre de la distribuci on de
probabilidad la variable aleatoria discreta X y contiene toda la informaci on necesaria
para estudiar X.
30 CAP
ITULO 4. TEORIA DE LA PROBABILIDAD
4.5.2. Variable aleatoria continua
La variable aleatoria X con funcion de destribucion F
X
es continua, se llama absoluta-
mente continua. Y existe una funcion no negativa e integrable f
X
, tal que para cualquier
valor de x se cumpla:
F
X
(a) =
_
a
f
X
(x)dx
para cada n umero real a.
La funcion f
X
se denomina funcion de densidad de probabilidad de la variable alea-
Figura 4.4: Variable aleatoria continua
toria X. En la teora de la probabilidad, la funcion de densidad de probabilidad, funcion
de densidad, o, simplemente, densidad de una variable aleatoria continua describe la pro-
babilidad relativa seg un la cual dicha variable aleatoria tomar a determinado valor.
Si una variable aleatoria X sigue una funcion de probabilidad P X
1
su densidad con
respecto a una medida de referencia es la derivada de Radon?Nikodym
f =
dP X
1
d
Y la coleccion de pares (x; f
X
(x)) es la destribuci on de probabilidad de la variable
aleatoria absolutamente continua X y contiene toda la informaci on para estudiar X.
4.5.3. Variable aleatoria mixta
Toda funcion de distribucion F(x) se puede escribir como una combinaci on lineal
convexa de una funcon de distribucion discreta F
d
(x) y otra continua F
c
(x), es decir,
admite la siguiente representacion:
F(x) = F
d
(x) + (1 )F
c
(x),
en donde 0 1.
4.5. TIPOS DE VARIABLE ALEATORIA 31
Figura 4.5: Variable aleatoria mixta
En todos los casos que consideraremos en este texto la distribucion continua de esta
descomposici on ser a absolutamente continua. En el caso general, esta distribucion conti-
nua puede a su vez escribirse como otra combinaci on lineal convexa entre una distribucion
absolutamente continua y una distribucion continua singular. Esto lleva al resultado ge-
neral de que cualquier distribucion puede escribirse como una combinaci on lineal convexa
de los tres tipos b asicos de distribuciones.
32 CAP
ITULO 4. TEORIA DE LA PROBABILIDAD
Captulo 5
Esperanza Matematica
5.1. Esperanza Matematica de una Variable Aleatoria
Denicion 5.1.
La esperanza matem atica es el punto de gravedad de la propagacion de la masa unitaria
de probabilidad, sobre el eje real, determinada por F
X
. Sea X una variable aleatoria cuya
funcion de distribucion F
X
se conoce. La esperanza matem atica de X, o simplemente la
esperanza de X, que se simboliza como E(X), est a denida por
1
:
E(X) =
_
0
(1 F
X
(x))dx
_
0
F
X
(x)dx = I
1
I
2
siempre y cuando, ambas integrales tengan valor nito.
Se dice que las esperanza de X no existe, si al menos una de las integrales es indeterminada
Figura 5.1: Esperanza matem atica
.
Ejemplo
2
: Dada la variable aleatoria X cuya funcion de distribucion es
F
X
(x) =
1
2
+
1
arctgx , < x <
1
Extrado de [9], pag. 266.
2
Ejemplo extrado de [9], pag. 268.
33
34 CAP
ITULO 5. ESPERANZA MATEM
ATICA
se desea estudiar la existencia de la esperanza de X.
Comenzaremos por evaluar la integral I
2
, para la cual tenemos
I
2
=
_
0
F
X
(x)dx =
_
0
_
1
2
+
1
arctgx
_
dx
I
2
=
_
x
2
+
x
arctgx
1
2
ln(1 +x
2
)
_
0
x=
I
2
= 0 + lm
x
_
x
2
x
arctgx +
1
2
ln(1 +x
2
)
_
El lmite nos lleva a la forma indeterminada , pero usando la fomrmula
arctgx =
2
arctg
1
x
obtenemos
I
2
= lm
x
_
x +
1
2
ln(1 +x
2
) +
x
arctg
1
x
_
= +0.
Para determinar la forma 0.hacemos una transformacion y usamos la regla de LHospital
de la siguiente manera
lm
x
xarctg
1
x
= lm
x
arctg
1
x
1
x
= lm
x
1
1 + (1/x)
2
1
x
2
_
1
x
2
_
= lm
x
1
1 +
1
x
2
= 1
y con esto,
I
2
= lm
x
_
_
_x +
1
2
ln
_
1 +x
2
_
+
1
1
1 +
1
x
2
_
_
_ = ++
1
es decir I
2
=
lo que nos permite armar, cualquiera que sea el valor de I
1
, que la esperanza de X no
existe.
5.2. ESPERANZA MATEM
ATICA DE VARIABLE ALEATORIA DISCRETA 35
Observaci on 5.1 (Esperanza matem atica en la Teora de la Medida).
Si X, variable aleatoria denida sobre el espacio de probabilidad (, A, P), es integra-
ble en respecto de P diremos que existe su esperanza o valor esperado que se dene como:
E(X) =
_
XdP.
Sea g es una funcion medible denida sobre(R, B(R)), entonces g(X) es una nueva
variable aleatoria cuya esperanza suponiendo que existe. Si aplicamos (4.1), la formula del
cambio de variable en la integral, con f=X y
f
= P
x
tendremos:
E(X) =
_
g(X)dP =
_
R
gdP
X
, (5.1)
expresi on que nos permite obtener la esperanza como una integral sobre R. A un as , (6.1)
no es operativa y solamente observando las caractersticas de la distribucion de probabili-
dad de X obtendremos expresiones manejables.En efecto, P
X
es discreta De acuerdo con
(4.3), que nos da la integral repecto de una medida discreta, si D es el soporte de P
X
E[g(X)] =
_
R
gdP
X
=
x
i
D
g(x
i
)P
X
({x
i
}) =
x
i
D
g(x
i
)P(X = x
i
) (5.2)
P
X
posee densidad Si f es la densidad de P
X
respecto de la medida de Lebesgue en R,
(4.2) nos permitira escribir:
E[g(X)] =
_
R
gdP
X
=
_
R
gfd. (5.3)
Observaci on 5.2. Es costumbre escribir tambien (6.1) de la forma
E[g(X)] =
_
g(X)dP =
_
R
gdF
X
, (5.4)
que se justica porque P
X
es la medida de Lebesgue-Stieltjes engendrada por F
X
.
5.2. Esperanza Matematica de Variable Aleatoria Discreta
Observaci on 5.3. Si en (6.2) tomamos para g la identidad obtendremos
E(X) =
x
i
D
x
i
P(X = x
i
) (5.5)
Denicion 5.2.
Si X es una variable aleatoria discreta con funcion de cuanta dada por p
X
(x
n
) = p
n
donde x
n
es un punto del recorrido de X, siendo R
X
contable, entonces decimos que E(X)
existe si y s olo si
n
x
n
.p
n
es una serie absolutamente convergente, esto es,
n
| x
n
| .p
n
<
36 CAP
ITULO 5. ESPERANZA MATEM
ATICA
En este caso es
3
E(X) =
n
x
n
.p
n
Ejemplo
4
: Sea la variable aleatoria X con funcion de cuanta
p
X
(x) =
e
.
x
x!
denida para x = 0, 1, 2, 3, ... se quiere calcular, si existe, E(X).
En este caso, como la variable s olo toma valores no negativos, para demostrar la presencia
de la esperanza de X hay que estudiar la convergencia de la serie de terminos no negativos
x=0
x.p
X
(x)
Tenemos
x=0
x.p
x
(x) = lm
N
N
x=0
x.
e
.
x
x!
= .e
lm
N
N
x=0
x1
(x 1)!
= .e
. lm
N
N1
r=0
r
r!
= e
=
Por lo tanto,
E(X)=
5.3. Esperanza Matematica de Variable Aleatoria Absolu-
tamente Continua
Observaci on 5.4. Cuando, como ocurre con frecuencia, gf es integrable Riemann, (6.3)
adopta la forma de la correspondiente integral de Riemann E[g(X)] =
_
+
g(x)f(x)dx,
que para el caso particular g(x)=x nos proporciona la E(X) =
_
+
xf(x)dx.
Denicion 5.3.
Sea X una varoable aleatoria absolutamente continua con funcion de densidad f
X
. La
esperanza de X existe y est a dada por
5
E(X) =
_
xf
X
(x)dx
3
Extrado de [9], pag. 271.
4
Ejemplo extrado de [9], pag. 276.
5
Extrado de [9], pag. 279.
5.3. ESPERANZAMATEM
ATICADE VARIABLE ALEATORIAABSOLUTAMENTE CONTINUA37
si y s olo si esta integral existe, esto es, si y s olo si
E(X) =
_
| x | f
X
(x)dx <
Ejemplo
6
: Para la variable aleatoria X cuya distribucion de probabilidad est a dada por
f
X
(x) =
_
e
(x)
si x >
0 si x
donde es una constante real positiva y una constante real cualquiera, se tiene.
Si > 0, entonces
I =
_
| x | f
X
(x)dx =
_
0
x. 0 dx +
_
0
x. 0 dx +
_
xe
(x)
dx
e introduciendo el cambio de variable y = x bajo el signo integral,
I =
_
0
(y +)e
y
dy =
_
0
e
y
dy +
_
0
ye
y
dy
=
_
e
y
0
_
ye
y
0
_
1
e
y
_
0
= +
1
En el caso en que sea > 0, se tiene entonces
E(X) = I = +
1
En cambio si es 0, y s se usa el cambio de variable bajo el signo integral x = y,
se tiene
I =
_
xf
X
(x)dx +
_
0
xe
(x)
dx +
_
0
xe
(x)
dx
I =
_
0
(y +)e
y
dy +
_
(y +)e
y
dy
I =
_
e
y
_
+y +
1
__
y=0
+
_
e
y
_
+y +
1
__
y=
I = e
_
+
1
_
e
0
_
+ 0 +
1
_
e
_
+
1
_
+e
_
+
1
_
I =
2
+
1
6
Ejemplo extrado de [9]. pag. 280.
38 CAP
ITULO 5. ESPERANZA MATEM
ATICA
Por lo tanto, tambien en el caso para los valores de < 0, existe E(X) y se tiene
E(X) =
_
xf
X
(x)dx =
_
xe
(x)
dx = +
1
y, en consecuencia, en cualquier caso para los valores de
E(X) = +
1
Captulo 6
Conuencia
Es este captulo, mostraremos como la integral de Lebesgue y la de Riemann conu-
yen para denir la esperanza matem atica de una variable aleatoria, mediante el teorema
llamado la ley del estadstico inconsciente, tal y como lo establece Cook, J. (2008)
Teorema 6.1 (Ley del estadstico inconsciente). Si g : R R es una funcion
X
-medible.
Sea g(X) es P-medible, entonces:
_
g(X)dP =
_
R
g(x)f
X
(x)dx (6.1)
Sea X una variable aleatoria y tiene una funcion de densidad de probabilidad f
X
(.).
Entonces, la esperanza matem atica de g(X) denida anteriormente coincidiendo asi con
este teorema, Entonces:
E(g(X)) =
_
g(X)dP =
_
R
g(x)f
X
(x)dx (6.2)
Como caso particular, cuando la funcion g(X) = X, entonces nos quedara simplemente
la esperanza de la variable aleatoria X dada por:
E(X) =
_
XdP =
_
R
xf
X
(x)dx
Demostraci on:
Para la demostracion de este teorema, abarcaremos las cuatro variantes de la funcion
g(.) medible, las cuales son: funcion caracterstica (indicadora), funcion simple, funcion no
negativa y funcion arbitraria (de valores positivos y negativos).
Ademas haremos uso de las deniciones y teoremas mencionados en los captulos anterio-
res:
39
40 CAP
ITULO 6. CONFLUENCIA
Denicion 3.10
Sea A un conjunto medible y f una funcion de medible no negativa. Se dene la
integral de f sobre A como:
_
A
fdx =
_
I
A
(x)f(x)dx
Teorema 2.3 (Teorema de Radon-Nikodyn)
Sea m la medida de Lebesgue. Si
X
es absolutamente continua con respecto a m, entonces
existe una funcion medible no negativa f
X
: R R tal que:
X
(A) =
_
A
f
X
dm
Teorema 2.1 (Teorema de la Convergencia Mon otona (TCM))
Si (f
i
)
i=1
es una sucesion mon
tona creciente de funciones medibles positvas, tales que
lm
i
f
i
= f, entonces:
_
X
_
lm
i
f
i
_
d =
_
X
fd = lm
i(
X
f
i
d)
.
Denicion 3.2 (Funcion de distribuci on)
Toda variable aleatoria esta asociada a una funcion de distribucion, la cual es de mucha
importacia.
Dados un espacio de probabilidad (, A, P), la funcion distribucion F
X
de una va-
riable aleatoria X, se dene como la probabilidad de un suceso de su respetiva va-
riable aleatoria. Siendo asi, F
X
: R [0; 1] denida como: F
X
(a) = P[X a]
Teorema 3.4
Sea g una funcion de Borel, no negativa sobre un espacio de medida. Entonces existe una
sucesion de funciones simples {f
X
n
} las cuales satisfacen que 0
1
2
...
n
g,
entonces:
lm
n
n
= g
1. Funci on indicadora:
Sea A un conjunto de Borel, donde A R. Luego denimos:
_
R
I
A
(x)f
X
(x)dx
Haciendo uso de la denicion (denicion 3.10):
Donde A R y la funcion medible es la funcion de densidad f
X
, entonces
_
R
I
A
(x)f
X
(x)dx =
_
A
f
X
(x)dx
Debido al teorema de Radon-Nikodyn (Teorema 3.3)
Donde nuestra integral es con respecto a P, entonces:
_
A
f
X
(x)dx =
X
(A)
41
y por denicion (4.5)
= P(X
1
(A))
Por otro lado, deniendo S = { : X() A}, se tiene que
_
I
A
(X())dP =
_
S
I
A
(X())dP +
_
S
I
A
(X())dP
si X() / A entoncces X() / S
=
_
S
1dP +
_
S
0dP
si denimos la funcion indicadora sobre S en , por la denicion de S, S.
Resultando 1
=
_
S
I
S
()dP
utilizaremos la denicion (3.11) en el caso particular(3.3). Donde nuestra medida es
la probabilidad
P(S) = P ( : X() A) = P(X
1
(A))
Logrando asi el cumplimiento del teorema puesto que
_
R
I
A
(x)f
X
(x)dx =
_
I
A
(X())dP
2. Funci on simple:
Utilizando la linealidad de las integrales y que una funcion simple es una combinaci on
lineal de Funciones indicadores. Resultando
_
R
(x)f
X
(x)dx =
_
R
k
i=1
a
i
I
A
i
(x)f(x)dx
siendo la sumatoria nita, entonces se permite el intercambio de lugar de la sumatoria
y la integral
=
k
i=1
a
i
_
R
I
A
i
(x)f(x)dx
En vista el teorema es valido para funciones indicadoras.
=
k
i=1
a
i
_
I
A
(X())dP
=
_
i=1
a
i
I
A
(X())dP
=
_
(X())dP
42 CAP
ITULO 6. CONFLUENCIA
3. Funci on no negativa:
La integral en f
X
en el Teorema de Radon-Nikodyn, es la medida.
Armaci on: La derivada de la medida P es f
X
, es decir dP = f
X
Por ende g(X)dP = g(X)f
X
Denimos una sucesion de funciones {f
X
n
} las cuales satisfacen que 0 f
X
1
f
X
2
... f
X
n
f
X
g, entonces:
lm
n
f
X
n
= f
X
g
Entonces:
_
g(X())dP =
_
lm
n
n
(X()dP
= lm
n
_
n
(X()dP
debido a que aplicamos el Teorema de la convergencia mon otona (Teorema 2.1) y
hemos visto que el teorema satistace para funciones simples,
= lm
n
_
R
(x)f
X
(x)dx
=
_
R
lm
n
(x)f
X
(x)dx
=
_
R
g(x)f
X
(x)dx
con lo cual se tiene que el teorema es valido para cualquier funcion no negativa g.
4. Funci on arbitraria:
Aplicando la denicion de parte negativa y positiva de una funcion medible, tenemos
que g() = g
+
() g
(), con g
+
y g
funciones no negativas. Entonces aplicando
el anterior resultado, se tiene
_
g
+
(X())dP =
_
R
g
+
(x)f
X
(x)dx
_
(X())dP =
_
R
g
(x)f
X
(x)dx
Observamos que:
_
g
+
(X())dP
_
(X())dP =
_
R
g
+
(x)f
X
(x)dx
_
R
g
(x)f
X
(x)dx
Por linealidad de las integrales, y visto que el teorema satisface para funciones no
negativas, se tine que
_
[g
+
g
](X())dP =
_
R
[g
+
g
](x)f
X
(x)dx
43
Y con esto se tiene la demostracion completa del teorema puesto que
_
g(X())dP =
_
R
g(x)f
X
(x)dx
Notese que cuando la funcion g es la funcion identica, se tiene que las dos deniciones
de esperanza conuyen. Es decir
E(X) =
_
R
xf
X
(x)dx =
_
XdP
44 CAP
ITULO 6. CONFLUENCIA
Captulo 7
Aplicaciones
7.1. Covarianza de variables independientes
Sean X e Y dos variables independientes con distribuciones marginales respectivas P
1
y P
2
y conjunta P
1
2 tales que existen los valores esperados de X, Y y XY . Aplicando el
teorema de Fubini se tiene,
E(XY ) =
_
R
xydP
1
2(x, y)
=
_
R
_
R
xydP
2
(y)
= EX
_
R
ydP
2
(y)
= EXEY,
por lo que cov(X, Y ) = E(XY )E(X)E(Y ) = 0. En particular el coecinete de correlaci on
de Pearson
=
cov(X, Y )
var(X)
(
1/2)var(Y )
(
1/2)
tambien se anula para X y Y independientes. El recproco no es cierto en general.
Dos variables aleatorias cuyo coecinete de correlaci on es 1 o 1 verican que una es
funcion lineal de la otra.
7.2. Problema de la aguja de Buon
Lo planteo el naturalista Buon en 1777 dentro de su libro Essai d arithemtique
moraley es el siguiente. Consideremos en R
2
una serie de lneas paralelas ortogonales al
eje x y separadas entre si por una distancia ja d. Tomemos una aguja de coser no muy
larga (l < d) y la lanzamos aleatoriamente sobre el plano. Cual es la probabilidad de
que la guja toque alguna de las lneas?
Cuando Byon usa la palabra aleatoriamente est a queriendo decir que puede caer de
cualquier forma y en cualquier sitio. Hemos de denir con precision que entendemos por
caer aleatoriamente. La situaci on de la aguja queda caracterizada si conocemos la posici on
45
46 CAP
ITULO 7. APLICACIONES
de su punto medio (x, y) y su orientacion o angulo que forma con el eje de abscisas .
Asumiremos en primer lugar que ninguna banda tiene una especial predisposici on a que
la aguja caiga en ella. Podemos suponer por tanto que (x, y) est a en la delimitada por el
x = 0yx = d. Observemos que el valor de y no inuye a la hora de considerar si la aguja
toca alguna de estas l
?neas. Sea X la variable aleatoria que nos da la abscisa del punto
medio. Tambien vamos a asumir que son independientes la posici on en la que cae con la
orientacion. Si denota la orientaci on aleatoria de la aguja estamos asumiendo en realidad
la independencia de yX. Por ultimo, dentro de los valores que puede tomar X y no
debe de haber sunconjuntos que con la misma longitud tengan m as probabilidad uno que
otro. En denitica, X la suponemos uniforme en [o, d] y uniforme en
_
2
, +
2
_
.
Que valores (x, ) son tales que la aguja toca a una de las dos lneas? Son los valores que
constituyen el siguiente conjunto,
B = {(x, ) : 0 x
l
2
cos od
l
2
cos x d}.
Aplicando la anterior proposici on la probabilidad que buscamos es
P((X, ) B) =
_
+
2
1
P(X [0,
l
2
cos ] [d
l
2
cos , d)d
=
1
d
_
+
2
l cos d =
2l
d
.
Bibliografa
[1] Yu Takeuchi. Integral de Lebesgue, 1966
[2] Rincon, Luis, Curso Intermedio de Probabilidad, 2007.
[3] Badajoz.Apuntes de Teora de la Medida,2013.
[4] Garca Nogales,Agustn.Teoras de la Medida y de la Probabilidad,2007.
[5] Ayala Guillermo & Montes Francisco.Teora de la Probabilidad.
[6] Quezada Batalla, Roberto. Una introduci on a la medida e integral de Lebesgue.
[7] Cordero Zamorano,Pablo Martn.La integral de Lebesgue en su contexto hist ori-
co,2006.
[8] Belich on,Jose A. Apuntes de Teora de la Medida,2008.
[9] Meza de Castillo,Elizabeth.Probabilidad,1994.
[10] Hanwen Zhang y Andres Gutierrez.Two Expressions about the Expectation of a Ran-
dom Variable,2008.
47
Anda mungkin juga menyukai
- Hacia Donde Va La Ciencia Politica - Giovanni SartoriDokumen6 halamanHacia Donde Va La Ciencia Politica - Giovanni SartoriCiencia Politica Uahc100% (2)
- Ebook - Introducción A Las Falacias en Contextos JurídicosDokumen59 halamanEbook - Introducción A Las Falacias en Contextos JurídicosLuis StuardoBelum ada peringkat
- Alma y Cuerpo en La Sexta Meditación de DescartesDokumen8 halamanAlma y Cuerpo en La Sexta Meditación de DescartesRobertoJoséCarmonaBallestas100% (1)
- Semana 3 - El Texto Argumentativo - Carlos MerinoDokumen21 halamanSemana 3 - El Texto Argumentativo - Carlos MerinoLUCIA BECERRABelum ada peringkat
- Investigacion Analisis Sintactico PDFDokumen22 halamanInvestigacion Analisis Sintactico PDFJESUS ALFONSO ALMADA VARGASBelum ada peringkat
- Enfoque AnaliticoDokumen11 halamanEnfoque AnaliticoJesúsBelum ada peringkat
- Prueba Texto Argumentativo 3°medioDokumen10 halamanPrueba Texto Argumentativo 3°medioGLADYS NÚÑEZ GUZMÁNBelum ada peringkat
- BayesianInference HandoutDokumen33 halamanBayesianInference HandoutJuan DominguezBelum ada peringkat
- SumatoriasDokumen5 halamanSumatoriasJuan Camilo CaBelum ada peringkat
- Simplificacion de Funciones LogicasDokumen6 halamanSimplificacion de Funciones LogicasVictor Benavides LopezBelum ada peringkat
- Equivalencias LógicasDokumen2 halamanEquivalencias LógicasAurelia JapuraBelum ada peringkat
- 6 Sesion LabDokumen19 halaman6 Sesion LabGuillermo VillarrealBelum ada peringkat
- InnatismoDokumen13 halamanInnatismoPablo SánchezBelum ada peringkat
- Cassier - Heidegger Davos 1929Dokumen30 halamanCassier - Heidegger Davos 1929luiscalder100% (1)
- Meillassoux Divine Inexistence PDF - En.esDokumen21 halamanMeillassoux Divine Inexistence PDF - En.esEstefano BGBelum ada peringkat
- Logica MatematicaDokumen11 halamanLogica MatematicaJimmy LingBelum ada peringkat
- Compuertas LógicasDokumen3 halamanCompuertas LógicasPablo RamirezBelum ada peringkat
- 90004A - 611-Unidad 2-Tarea 2 - Carlos ParsonsDokumen7 halaman90004A - 611-Unidad 2-Tarea 2 - Carlos ParsonsCarlos Andres Parsons MacarenoBelum ada peringkat
- Rubrica de Evaluación DebateDokumen2 halamanRubrica de Evaluación DebateJuan Carlos Mignolet NavarreteBelum ada peringkat
- El Pensamiento Según DeweyDokumen6 halamanEl Pensamiento Según Deweyandreayosana74Belum ada peringkat
- WA0031.docx - EditedDokumen15 halamanWA0031.docx - Editedsantiagolv63Belum ada peringkat
- Mapa Conseptualteria de ConocimientoDokumen1 halamanMapa Conseptualteria de ConocimientoUbelser Tamay NúñezBelum ada peringkat
- Informe CP3Dokumen7 halamanInforme CP3Jhon Cando PuenayanBelum ada peringkat
- EcuacionesDokumen69 halamanEcuacionesErasmo Mamani PintoBelum ada peringkat
- Primer-Trimestre. Tema 1docxDokumen3 halamanPrimer-Trimestre. Tema 1docxZoe Loli SanchezBelum ada peringkat
- Apunte Usm LogicaDokumen11 halamanApunte Usm LogicaBraulio Esteban Arancibia MuñozBelum ada peringkat
- GUIA #09. El MODERNISMO (EL EMPIRISMO) PDFDokumen7 halamanGUIA #09. El MODERNISMO (EL EMPIRISMO) PDFPatricia otalora saltarinBelum ada peringkat
- 90 Tarea 2 Jonathan CastroDokumen12 halaman90 Tarea 2 Jonathan CastroJonathan CastroBelum ada peringkat
- Juicios OralesDokumen8 halamanJuicios Oralesyezz adventureBelum ada peringkat
- Leticia Heydi Pascual Castillo - 3194646 - 0Dokumen6 halamanLeticia Heydi Pascual Castillo - 3194646 - 0Leticia Pascual castilloBelum ada peringkat