Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Modern Scoring BRASS Manual1Dokumen25 halamanModern Scoring BRASS Manual1Pepe ChorrasBelum ada peringkat
- Measuring Propeller Drop With The Help of Poker GaugeDokumen2 halamanMeasuring Propeller Drop With The Help of Poker Gaugeas100% (1)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- May June 2019 P02Dokumen40 halamanMay June 2019 P02Rongrui ZhouBelum ada peringkat
- Danfoss PVE - Series - 7 - Technical - Information PDFDokumen56 halamanDanfoss PVE - Series - 7 - Technical - Information PDFJuan Felipe Garza GBelum ada peringkat
- Connection Design Steel Base Plate Bs5950 v2015 01Dokumen4 halamanConnection Design Steel Base Plate Bs5950 v2015 01Anonymous j9PxwnoBelum ada peringkat
- Tool Geometry and Tool LifeDokumen29 halamanTool Geometry and Tool LifeSudeepHandikherkarBelum ada peringkat
- Name: Fatema Saeed Grade Level:: Lesson Plan TemplateDokumen3 halamanName: Fatema Saeed Grade Level:: Lesson Plan Templateapi-340688378Belum ada peringkat
- Cocoa Fermentation ManualDokumen18 halamanCocoa Fermentation ManualJimena Rios100% (1)
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- Test Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas DasdmasdDokumen1 halamanTest Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas Dasdmasdtempo1234Belum ada peringkat
- Unknown EveasdDokumen1 halamanUnknown Eveasdtempo1234Belum ada peringkat
- SaasdDokumen4 halamanSaasdtempo1234Belum ada peringkat
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- AdasdsadDokumen10 halamanAdasdsadtempo1234Belum ada peringkat
- My Journey In Hindu AstrologyDokumen8 halamanMy Journey In Hindu AstrologyKottu PrasadBelum ada peringkat
- AsdasdDokumen6 halamanAsdasdtempo1234Belum ada peringkat
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- Servasdaser LogDokumen1 halamanServasdaser Logtempo1234Belum ada peringkat
- Sasderverasd AflogDokumen3 halamanSasderverasd Aflogtempo1234Belum ada peringkat
- Test Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas DasdmasdDokumen1 halamanTest Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas Dasdmasdtempo1234Belum ada peringkat
- ASDogDokumen2 halamanASDogtempo1234Belum ada peringkat
- SaasdDokumen4 halamanSaasdtempo1234Belum ada peringkat
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- Servasdaser LoasdgDokumen1 halamanServasdaser Loasdgtempo1234Belum ada peringkat
- Sasderver LogasdDokumen4 halamanSasderver Logasdtempo1234Belum ada peringkat
- Servqweerwqe LoqweqwegDokumen1 halamanServqweerwqe Loqweqwegtempo1234Belum ada peringkat
- Test Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas DasdmasdDokumen1 halamanTest Adal Sdjada D'asdas'as D'as:mdas' As Dmas'fas Amas Fas Das, D Asdas D, As D, As Dmas Dmas D Amsd Asdas Dmas Dmas Dasdmasdtempo1234Belum ada peringkat
- Asdsadservasder LogDokumen3 halamanAsdsadservasder Logtempo1234Belum ada peringkat
- New Rich Text DocumentDokumen1 halamanNew Rich Text Documentdbircs123adasdasdasdBelum ada peringkat
- DMPA CombinedDokumen527 halamanDMPA Combinedlolzcat3454Belum ada peringkat
- ST RDDokumen2 halamanST RDBalteshwar SinghBelum ada peringkat
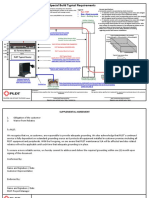
- Special Build Typical Requirements (Rev1) PDFDokumen2 halamanSpecial Build Typical Requirements (Rev1) PDFToper CdjBelum ada peringkat
- LC 72322Dokumen13 halamanLC 72322thecanislupusBelum ada peringkat
- RPGS Complete Lecture Note1 Inpdf Compressed1Dokumen203 halamanRPGS Complete Lecture Note1 Inpdf Compressed1Purusottam PandeyBelum ada peringkat
- Angle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesDokumen14 halamanAngle Style, Pressure Relief Valves For Steam, Gas, and Liquid ServicesCHRISTIAN ZAVALABelum ada peringkat
- MinePlan Release NotesDokumen14 halamanMinePlan Release NotesJuanJo RoblesBelum ada peringkat
- Chm580 Experiment 3Dokumen9 halamanChm580 Experiment 3ohhiBelum ada peringkat
- Operating Instruction Precision Balance: Kern EwDokumen15 halamanOperating Instruction Precision Balance: Kern EwjohnBelum ada peringkat
- Dynamic Programming Algorithm Explained in ECE 551 LectureDokumen11 halamanDynamic Programming Algorithm Explained in ECE 551 Lectureadambose1990Belum ada peringkat
- Manulife VRV System Selection for Philippines OfficeDokumen7 halamanManulife VRV System Selection for Philippines Officelucio ruiz jrBelum ada peringkat
- The Use and Misuse of SEMDokumen30 halamanThe Use and Misuse of SEMPPDTBM renBelum ada peringkat
- CarbonatiteDokumen9 halamanCarbonatiteWWW.1580.L0GN.CFBelum ada peringkat
- LP Galvo Scanner LaserphotoDokumen16 halamanLP Galvo Scanner LaserphotoCostin DinamaxBelum ada peringkat
- Sensitivity Analysis: Enter Base, Minimum, and Maximum Values in Input CellsDokumen5 halamanSensitivity Analysis: Enter Base, Minimum, and Maximum Values in Input CellsSajid IqbalBelum ada peringkat
- TG SkripsiDokumen138 halamanTG SkripsiYudanto SetyoBelum ada peringkat
- CCR Load Calculator 2014-03-13Dokumen35 halamanCCR Load Calculator 2014-03-13Danielle FowlerBelum ada peringkat
- Discoverer Installation and Integration With EBSDokumen25 halamanDiscoverer Installation and Integration With EBSRajendra PrasadBelum ada peringkat
- Astm D2899Dokumen6 halamanAstm D2899btwilliBelum ada peringkat
- Quantitative Method Problem SetDokumen10 halamanQuantitative Method Problem SetConstanceBelum ada peringkat
- Tendenze Attuali Nei Metodi Di Calcolo Per Progettare GearboxDokumen40 halamanTendenze Attuali Nei Metodi Di Calcolo Per Progettare GearboxLuis TestaBelum ada peringkat
- NCERT Solutions For Class 8 Maths Chapter 14 - FactorizationDokumen25 halamanNCERT Solutions For Class 8 Maths Chapter 14 - FactorizationSATAMANYU BHOLBelum ada peringkat