Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Guide For The Application of The European Standard EN 50160: BSI Standards PublicationDokumen48 halamanGuide For The Application of The European Standard EN 50160: BSI Standards Publicationkotini100% (1)
- Procedure Qualification RecordDokumen2 halamanProcedure Qualification RecordDan ClarkeBelum ada peringkat
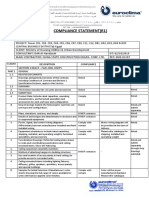
- compliance sheet of euroclima加承包商Dokumen9 halamancompliance sheet of euroclima加承包商Li Liu100% (1)
- DJANGO Manual 125-150cc PDFDokumen83 halamanDJANGO Manual 125-150cc PDFsimrs.rsudkojaBelum ada peringkat
- Xylem Company Profile 2012 PortableDokumen26 halamanXylem Company Profile 2012 Portablegeorge_efstratiadisBelum ada peringkat
- WP310LDokumen109 halamanWP310Ljohn smithBelum ada peringkat
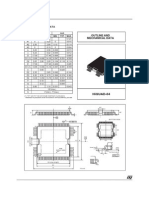
- Powerso16: Outline and Mechanical DataDokumen1 halamanPowerso16: Outline and Mechanical DataDan EsentherBelum ada peringkat
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDokumen1 halamanPowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherBelum ada peringkat
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDokumen1 halamanPowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherBelum ada peringkat
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDokumen1 halamanPSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherBelum ada peringkat
- Hiquad 64Dokumen1 halamanHiquad 64Dan EsentherBelum ada peringkat
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDokumen1 halamanMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherBelum ada peringkat
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDokumen1 halamanPowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherBelum ada peringkat
- Pso 36Dokumen1 halamanPso 36Dan EsentherBelum ada peringkat
- 10831Dokumen21 halaman10831Dan EsentherBelum ada peringkat
- L9929Dokumen3 halamanL9929Dan EsentherBelum ada peringkat
- 10832Dokumen26 halaman10832Dan EsentherBelum ada peringkat
- Ppak Mechanical Data: Dim. Min. TYP MaxDokumen1 halamanPpak Mechanical Data: Dim. Min. TYP MaxDan EsentherBelum ada peringkat
- 10833Dokumen18 halaman10833Dan EsentherBelum ada peringkat
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Dokumen26 halamanFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherBelum ada peringkat
- 10311Dokumen23 halaman10311Dan Esenther100% (1)
- 10640Dokumen22 halaman10640Dan EsentherBelum ada peringkat
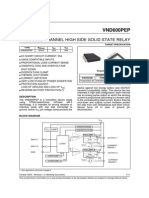
- VND830PEP-E: Double Channel High Side DriverDokumen13 halamanVND830PEP-E: Double Channel High Side DriverDan EsentherBelum ada peringkat
- VNQ830A-E: Quad Channel High Side DriverDokumen17 halamanVNQ830A-E: Quad Channel High Side DriverDan EsentherBelum ada peringkat
- 10830Dokumen21 halaman10830Dan EsentherBelum ada peringkat
- 10683Dokumen19 halaman10683Dan EsentherBelum ada peringkat
- 10303Dokumen5 halaman10303Dan EsentherBelum ada peringkat
- Uh 30Dokumen10 halamanUh 30Dan EsentherBelum ada peringkat
- 10302Dokumen4 halaman10302Dan EsentherBelum ada peringkat
- 9696Dokumen17 halaman9696Dan EsentherBelum ada peringkat
- 10261Dokumen10 halaman10261Dan EsentherBelum ada peringkat
- 10022Dokumen262 halaman10022Dan EsentherBelum ada peringkat
- 9933Dokumen11 halaman9933Dan EsentherBelum ada peringkat
- 9927Dokumen11 halaman9927Dan EsentherBelum ada peringkat
- 9792Dokumen21 halaman9792Dan EsentherBelum ada peringkat
- 9938Dokumen11 halaman9938Dan EsentherBelum ada peringkat
- DR - Swapna BhowmikDokumen21 halamanDR - Swapna BhowmikAnil Anil ChoudharyBelum ada peringkat
- Sewage Sludge CombustionDokumen62 halamanSewage Sludge CombustionJoão Diego FeitosaBelum ada peringkat
- Map Tomat CerryDokumen14 halamanMap Tomat CerrySteFunnie YolalandhaBelum ada peringkat
- Cross Flow FilterationDokumen4 halamanCross Flow FilterationNithya Ram100% (1)
- Anshu Welding PDFDokumen45 halamanAnshu Welding PDFAnshu SourabhBelum ada peringkat
- Paper Insulated Distribution CablesDokumen10 halamanPaper Insulated Distribution Cablesdeepak2628Belum ada peringkat
- DOCUMENT: Electrical Standard Specification: Of: 1 Standard No. EPD - A.19Dokumen5 halamanDOCUMENT: Electrical Standard Specification: Of: 1 Standard No. EPD - A.19Ahitworld 21Belum ada peringkat
- Schwab Family ValuesDokumen18 halamanSchwab Family ValuesguingooBelum ada peringkat
- bk3 - ch20 - Sug Ans - eDokumen3 halamanbk3 - ch20 - Sug Ans - eAlice TamBelum ada peringkat
- 435W 450W Astrotwins: Enjoy The Energy of The UniverseDokumen2 halaman435W 450W Astrotwins: Enjoy The Energy of The UniverseMiro MiroBelum ada peringkat
- Everoze Batteries Beyond The SpinDokumen16 halamanEveroze Batteries Beyond The SpinJohanaCamilaAmórteguiBelum ada peringkat
- Pim1Strun BR: Product DocumentationDokumen9 halamanPim1Strun BR: Product DocumentationRílammis SantosBelum ada peringkat
- Fan Arrangements Rotation Discharge and Motor Position Fe 3900Dokumen8 halamanFan Arrangements Rotation Discharge and Motor Position Fe 3900Adriano SantosBelum ada peringkat
- Circuit ThryDokumen34 halamanCircuit ThryMathi YuvarajanBelum ada peringkat
- Seismic Response of Structure With Lead Extrusion DamperDokumen7 halamanSeismic Response of Structure With Lead Extrusion DamperIJRASETPublicationsBelum ada peringkat
- ToRs For - Nyamugasani GFS - 0Dokumen41 halamanToRs For - Nyamugasani GFS - 0pepegrillo891Belum ada peringkat
- Air Cycle RefrigerationDokumen15 halamanAir Cycle RefrigerationSyed Wajih Ul HassanBelum ada peringkat
- 6 Meter GS-35B Amplifier ConstructionDokumen3 halaman6 Meter GS-35B Amplifier Constructiontheodorakis017781Belum ada peringkat
- ELSD IQ OQ ProtocolDokumen7 halamanELSD IQ OQ ProtocolRajan RamaswamiBelum ada peringkat
- International Actor CPs - Northwestern 2014Dokumen215 halamanInternational Actor CPs - Northwestern 2014DerekBelum ada peringkat
- Science ACE - Atomic Model PamphletDokumen2 halamanScience ACE - Atomic Model PamphletBenedict Lee100% (1)
- Practical Mosfet Testing For Audio: by Nelson Pass, (C) 2003 Pass LaboratoriesDokumen11 halamanPractical Mosfet Testing For Audio: by Nelson Pass, (C) 2003 Pass Laboratoriesanon-306355100% (1)
- Pbat 10 eDokumen16 halamanPbat 10 eapi-290101261Belum ada peringkat
- Questions For Practice: Basic Training For Oil and Chemical Tanker Cargo Operation (BTOCTCO)Dokumen38 halamanQuestions For Practice: Basic Training For Oil and Chemical Tanker Cargo Operation (BTOCTCO)Ashok YBelum ada peringkat