Anda mungkin juga menyukai
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
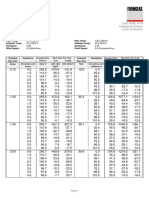
- Estimates Table (Construction)Dokumen3 halamanEstimates Table (Construction)Joe A. Cagas86% (114)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Thesis Proposal FinalDokumen26 halamanThesis Proposal FinalRonald Cario SeguinBelum ada peringkat
- Certificate of Contract Completion and Contractor AffidavitDokumen1 halamanCertificate of Contract Completion and Contractor AffidavitMizanur RahmanBelum ada peringkat
- 6863 Incident ReportDokumen5 halaman6863 Incident ReportRonald Cario SeguinBelum ada peringkat
- FinishesDokumen75 halamanFinishesYna VictoriaBelum ada peringkat
- Checklist STPDokumen8 halamanChecklist STPRonald Cario Seguin100% (3)
- JO003-10-LB - MDD-IDM-001-3 P&ID Steam and Bypass SystemDokumen9 halamanJO003-10-LB - MDD-IDM-001-3 P&ID Steam and Bypass SystemHasan MustafaBelum ada peringkat
- Notifier Design Guide - Little - Black - BookDokumen144 halamanNotifier Design Guide - Little - Black - BookKao Sophearak100% (1)
- Plate Heat Exchanger Gaskets WEBSITEDokumen2 halamanPlate Heat Exchanger Gaskets WEBSITESHAKEEL ISMAIL LAMBAYBelum ada peringkat
- Safety Inspection ChecklistDokumen3 halamanSafety Inspection ChecklistBobby IM Sibarani100% (4)
- Centrifugal Chiller Fundamentals Guide PDFDokumen33 halamanCentrifugal Chiller Fundamentals Guide PDFKhizerBelum ada peringkat
- 12326899Dokumen70 halaman12326899imranBelum ada peringkat
- Etag004 Fg004 Etics Fin2Dokumen87 halamanEtag004 Fg004 Etics Fin2Serban RaduBelum ada peringkat
- Vocabulary Casas AptisDokumen6 halamanVocabulary Casas AptisjuliBelum ada peringkat
- Cellular Glass - Thickness CalculationDokumen15 halamanCellular Glass - Thickness CalculationPrabha KaranBelum ada peringkat
- Biological Treatment Checklist - Suspended Growth - Activated Sludge, Oxidation DitchesDokumen13 halamanBiological Treatment Checklist - Suspended Growth - Activated Sludge, Oxidation DitchesRonald Cario SeguinBelum ada peringkat
- Inspection GuidanceDokumen49 halamanInspection GuidanceRonald Cario SeguinBelum ada peringkat
- Department of Public Works and HighwaysDokumen1 halamanDepartment of Public Works and HighwaysRonald Cario SeguinBelum ada peringkat
- QUOTATION Consolidation SubdivisionDokumen1 halamanQUOTATION Consolidation SubdivisionRonald Cario Seguin100% (1)
- Miscellaneous Sales PatentDokumen2 halamanMiscellaneous Sales PatentRonald Cario SeguinBelum ada peringkat
- Order #386164115: Shipping Address Shipping Method Coupon CodeDokumen1 halamanOrder #386164115: Shipping Address Shipping Method Coupon CodeRonald Cario SeguinBelum ada peringkat
- Genealogyofjesuschrist Tree PDFDokumen2 halamanGenealogyofjesuschrist Tree PDFRonald Cario SeguinBelum ada peringkat
- Seminar Earth Work Volume Area CalculationDokumen384 halamanSeminar Earth Work Volume Area CalculationRonald Cario SeguinBelum ada peringkat
- Genealogy of Jesus Christ Final PDFDokumen2 halamanGenealogy of Jesus Christ Final PDFRonald Cario SeguinBelum ada peringkat
- Transformer 25 KVA - 28.10.2017Dokumen1 halamanTransformer 25 KVA - 28.10.2017Ronald Cario SeguinBelum ada peringkat
- 9 Testing The DifferencesDokumen10 halaman9 Testing The DifferencesRonald Cario SeguinBelum ada peringkat
- BBG Terms and Conditions 09-06-2017Dokumen2 halamanBBG Terms and Conditions 09-06-2017Ronald Cario SeguinBelum ada peringkat
- CM Sapo 2003Dokumen12 halamanCM Sapo 2003Ronald Cario SeguinBelum ada peringkat
- Ac-Corroguard: Inhibitor Solution For Reinforcement BarDokumen1 halamanAc-Corroguard: Inhibitor Solution For Reinforcement BarbhagwatpatilBelum ada peringkat
- Oberflächenbehandlungsangaben: PG Norm/StandardDokumen11 halamanOberflächenbehandlungsangaben: PG Norm/Standardsafat parBelum ada peringkat
- RCD-DeSIGN Engr. Mark ChristianDokumen9 halamanRCD-DeSIGN Engr. Mark ChristianTaki TachibanaBelum ada peringkat
- Set 01Dokumen161 halamanSet 01ashishjakateBelum ada peringkat
- Asme Section Ii A-2 Sa-985 Sa-985mDokumen22 halamanAsme Section Ii A-2 Sa-985 Sa-985mAnonymous GhPzn1xBelum ada peringkat
- 250+ TOP MCQs On Types of Pipes and AnswersDokumen7 halaman250+ TOP MCQs On Types of Pipes and Answersahmadreza777100% (1)
- NES Series Water Softeners: ... The Next GenerationDokumen4 halamanNES Series Water Softeners: ... The Next GenerationBillBelum ada peringkat
- Components and Systems For Vehicle Construction and IndustryDokumen21 halamanComponents and Systems For Vehicle Construction and IndustryCarlos SantosBelum ada peringkat
- ACI-ASTM CB6 (J91804) Cast Stainless SteelDokumen10 halamanACI-ASTM CB6 (J91804) Cast Stainless SteelSalma FarooqBelum ada peringkat
- Abdulpk@ciitsahiwal Edu PKDokumen8 halamanAbdulpk@ciitsahiwal Edu PKAhmadrazatahirBelum ada peringkat
- AASHTO-2009 Highway Signs 159 PDFDokumen1 halamanAASHTO-2009 Highway Signs 159 PDFer_rahmansBelum ada peringkat
- 2012 Design ManualDokumen626 halaman2012 Design ManualWPenrithBelum ada peringkat
- Pipe JIS G3442 GalvanizedDokumen4 halamanPipe JIS G3442 GalvanizedakBelum ada peringkat
- DAFZ RegulationsDokumen41 halamanDAFZ RegulationsRoger SchulpBelum ada peringkat
- Design Guide: Low Energy Cooling and Ventilation For Indian ResidencesDokumen61 halamanDesign Guide: Low Energy Cooling and Ventilation For Indian ResidencesDewa FrendhikaBelum ada peringkat
- Quiz No. 6: Strength of MaterialsDokumen8 halamanQuiz No. 6: Strength of MaterialsNico BereberBelum ada peringkat
- CAB Cable Rings and SaddlesDokumen5 halamanCAB Cable Rings and SaddlesgoyalmanojBelum ada peringkat
- Certificate of Product RatingsDokumen1 halamanCertificate of Product RatingsFernando PascualBelum ada peringkat
- Anand ModelDokumen7 halamanAnand ModelmerxzBelum ada peringkat
- STANDARD BBS FORMAT FOR 4-L, 1-Side (With Cushion)Dokumen11 halamanSTANDARD BBS FORMAT FOR 4-L, 1-Side (With Cushion)Sreedhar BhuduruBelum ada peringkat