Anda mungkin juga menyukai
- Powerso16: Outline and Mechanical DataDokumen1 halamanPowerso16: Outline and Mechanical DataDan EsentherBelum ada peringkat
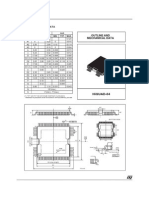
- Powerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDokumen1 halamanPowerso-20 Mechanical Data: Dim. Mm. Inch Min. TYP Max. Min. Typ. MaxDan EsentherBelum ada peringkat
- PSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDokumen1 halamanPSSO-12 Mechanical Data: Dim. Mm. Min. TYP MaxDan EsentherBelum ada peringkat
- L9929Dokumen3 halamanL9929Dan EsentherBelum ada peringkat
- 10833Dokumen18 halaman10833Dan EsentherBelum ada peringkat
- Powersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDokumen1 halamanPowersso-24 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherBelum ada peringkat
- Pso 36Dokumen1 halamanPso 36Dan EsentherBelum ada peringkat
- Ppak Mechanical Data: Dim. Min. TYP MaxDokumen1 halamanPpak Mechanical Data: Dim. Min. TYP MaxDan EsentherBelum ada peringkat
- Hiquad 64Dokumen1 halamanHiquad 64Dan EsentherBelum ada peringkat
- Powerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDokumen1 halamanPowerso-10 Mechanical Data: Dim. Mm. Inch Min. Typ Max. Min. Typ. MaxDan EsentherBelum ada peringkat
- Multipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDokumen1 halamanMultipowerso-30 Mechanical Data: Dim. Mm. Min. Typ MaxDan EsentherBelum ada peringkat
- 10832Dokumen26 halaman10832Dan EsentherBelum ada peringkat
- 10311Dokumen23 halaman10311Dan Esenther100% (1)
- VNQ830A-E: Quad Channel High Side DriverDokumen17 halamanVNQ830A-E: Quad Channel High Side DriverDan EsentherBelum ada peringkat
- 10831Dokumen21 halaman10831Dan EsentherBelum ada peringkat
- 10261Dokumen10 halaman10261Dan EsentherBelum ada peringkat
- Fully Integrated H-Bridge Motor Driver: VNH3SP30Dokumen26 halamanFully Integrated H-Bridge Motor Driver: VNH3SP30Dan EsentherBelum ada peringkat
- 10830Dokumen21 halaman10830Dan EsentherBelum ada peringkat
- 10303Dokumen5 halaman10303Dan EsentherBelum ada peringkat
- 10683Dokumen19 halaman10683Dan EsentherBelum ada peringkat
- 10640Dokumen22 halaman10640Dan EsentherBelum ada peringkat
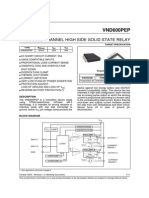
- VND830PEP-E: Double Channel High Side DriverDokumen13 halamanVND830PEP-E: Double Channel High Side DriverDan EsentherBelum ada peringkat
- Uh 30Dokumen10 halamanUh 30Dan EsentherBelum ada peringkat
- 9696Dokumen17 halaman9696Dan EsentherBelum ada peringkat
- 10302Dokumen4 halaman10302Dan EsentherBelum ada peringkat
- 9933Dokumen11 halaman9933Dan EsentherBelum ada peringkat
- 10022Dokumen262 halaman10022Dan EsentherBelum ada peringkat
- 9792Dokumen21 halaman9792Dan EsentherBelum ada peringkat
- 9927Dokumen11 halaman9927Dan EsentherBelum ada peringkat
- 9926Dokumen10 halaman9926Dan EsentherBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5783)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- AUT Time Table 22 23Dokumen13 halamanAUT Time Table 22 23Akash BommidiBelum ada peringkat
- Virtualizer Pro DSP2024PDokumen40 halamanVirtualizer Pro DSP2024PNestor CustódioBelum ada peringkat
- AN-SLZ Integrated Solar Street Light Datasheet-AnernDokumen11 halamanAN-SLZ Integrated Solar Street Light Datasheet-AnernalbertoBelum ada peringkat
- Digital Workflow: Quick OverviewDokumen1 halamanDigital Workflow: Quick OverviewAlian HernandezBelum ada peringkat
- Application Guide - Gear Grinding CelumDokumen8 halamanApplication Guide - Gear Grinding CelumLê Đức BảoBelum ada peringkat
- QO D 8 1 7 Ver 1 2 Relaxation of Vendor Registration RequirementsDokumen3 halamanQO D 8 1 7 Ver 1 2 Relaxation of Vendor Registration RequirementsMohit SinghBelum ada peringkat
- Incremental encoder data sheetDokumen1 halamanIncremental encoder data sheetGrin GoBelum ada peringkat
- Pivotell Advance GSM Instruction Book 130418Dokumen16 halamanPivotell Advance GSM Instruction Book 130418Eira HammondBelum ada peringkat
- Internet of Things: (Lecture 9)Dokumen34 halamanInternet of Things: (Lecture 9)Qasim FarooqBelum ada peringkat
- COSIMIR program overviewDokumen53 halamanCOSIMIR program overviewasdasdaBelum ada peringkat
- Thesis Theme 2.0Dokumen8 halamanThesis Theme 2.0PaperWritingWebsitePalmBay100% (2)
- Hellinikon Josep Acebillo June 2011Dokumen5 halamanHellinikon Josep Acebillo June 2011Kataskeui Κατασκευή ΜπλόγκBelum ada peringkat
- Manual QM de SAPDokumen21 halamanManual QM de SAPAnonymous rHxYVxtB100% (2)
- Eir April2019Dokumen1.766 halamanEir April2019manisha0% (1)
- 1mrk509063-Uen en Operatoras Manual Compact Current Relay and Protection Assemblies RXHL 401 and Rahl 401Dokumen22 halaman1mrk509063-Uen en Operatoras Manual Compact Current Relay and Protection Assemblies RXHL 401 and Rahl 401Reji KurianBelum ada peringkat
- Programing C++ CH (1-5)Dokumen68 halamanPrograming C++ CH (1-5)احمد الوحشBelum ada peringkat
- Toro Equipment Filter Press Draco PDFDokumen12 halamanToro Equipment Filter Press Draco PDFAlfredo CollantesBelum ada peringkat
- Metal Detectors Performance Uxo For98Dokumen17 halamanMetal Detectors Performance Uxo For98A. VillaBelum ada peringkat
- D84365GC10 SG PDFDokumen444 halamanD84365GC10 SG PDFAamir MalikBelum ada peringkat
- Spare Parts List: Pneumatic RollerDokumen353 halamanSpare Parts List: Pneumatic RollerAleixandre Gomez VasquezBelum ada peringkat
- Taiwan CatalogDokumen27 halamanTaiwan Catalogmarshalpc67% (12)
- Adobe Experience Manager Architect: Adobe Certified Expert Exam GuideDokumen8 halamanAdobe Experience Manager Architect: Adobe Certified Expert Exam GuideZjadacz AntymateriiBelum ada peringkat
- Error MSGDokumen360 halamanError MSGAlexandre LepesqueurBelum ada peringkat
- Solar Projects Being Implemented Under Schemes Operated by SECIDokumen14 halamanSolar Projects Being Implemented Under Schemes Operated by SECIbhargavBelum ada peringkat
- Indra Sakti CVDokumen3 halamanIndra Sakti CVHendri Agus Setiawan BintangBelum ada peringkat
- Cpu 260 PDFDokumen70 halamanCpu 260 PDFFernandoCamargoBelum ada peringkat
- Data SheetDokumen52 halamanData SheetRohmad JayaBelum ada peringkat
- M e Services SurveyDokumen4 halamanM e Services SurveyMohamed OmarBelum ada peringkat
- Challenges of GMP and GXP in IndiaDokumen40 halamanChallenges of GMP and GXP in IndiaTim SandleBelum ada peringkat
- Nasa STD 5005dDokumen76 halamanNasa STD 5005dvominhthaiBelum ada peringkat