Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Moving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANADokumen97 halamanMoving From Standalone To Embedded Deployment in SAP Fiori For SAP S - 4HANASueli100% (1)
- Thesis Submission Certificate FormatDokumen6 halamanThesis Submission Certificate Formatmichellespragueplano100% (3)
- Volvo Tad 660ve SpecsDokumen5 halamanVolvo Tad 660ve SpecsAhmed Mostafa YoussefBelum ada peringkat
- IET Academic Accreditation BrochureDokumen12 halamanIET Academic Accreditation BrochureNash PillayBelum ada peringkat
- 8 Latest Kitchen Chimney Brands in India 2020Dokumen4 halaman8 Latest Kitchen Chimney Brands in India 2020Sulagna ChowdhuryBelum ada peringkat
- Generator Protection - 7UM85 - Technical DataDokumen42 halamanGenerator Protection - 7UM85 - Technical DataDoan Anh TuanBelum ada peringkat
- Code InjectionDokumen11 halamanCode InjectionJitendra RaiBelum ada peringkat
- De Lorenzo - Smart Grid EngDokumen29 halamanDe Lorenzo - Smart Grid EngwrdlifeBelum ada peringkat
- Bab 2 - Coal Handling PlantDokumen10 halamanBab 2 - Coal Handling PlantmasgrahaBelum ada peringkat
- A Brief History of SpreadsheetsDokumen5 halamanA Brief History of SpreadsheetsDexter CastilloBelum ada peringkat
- HackingDokumen78 halamanHackingAnanth Balakrishnan100% (15)
- Safety Manual (B-80687EN 10)Dokumen35 halamanSafety Manual (B-80687EN 10)Jander Luiz TomaziBelum ada peringkat
- Boeing 787Dokumen5 halamanBoeing 787shihab100% (1)
- I Have A Website Called GravitywriteDokumen6 halamanI Have A Website Called GravitywriteNirmal KumarBelum ada peringkat
- NEW Colchester Typhoon Twin Spindle CNC Turning Centre Brochure 2018Dokumen12 halamanNEW Colchester Typhoon Twin Spindle CNC Turning Centre Brochure 2018Marlon GilerBelum ada peringkat
- 7UT85Dokumen9 halaman7UT85sparkCE100% (1)
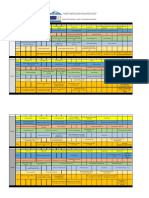
- Time Table Spring 2022-2023 V2Dokumen3 halamanTime Table Spring 2022-2023 V2moad alsaityBelum ada peringkat
- Cosivis eDokumen208 halamanCosivis eZadiel MirelesBelum ada peringkat
- Sustainable Finance Esg Integration SolutionDokumen5 halamanSustainable Finance Esg Integration SolutionRISHABH RAJ JAINBelum ada peringkat
- Vaadin FlowDokumen14 halamanVaadin FlowAnandhuBalanBelum ada peringkat
- Chapter 3Dokumen74 halamanChapter 3Berhane KifleBelum ada peringkat
- E-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFDokumen11 halamanE-Waste An Overview On Generation, Collection, Legislation and Recycling Practices Denise PDFThamirisAgmBelum ada peringkat
- Sap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565Dokumen1 halamanSap Erp Financials Configuration and Design 2nd Ed 59c5c66e1723dd42ad224565VManiKishoreBelum ada peringkat
- Nokia TDM Migration White Paper enDokumen28 halamanNokia TDM Migration White Paper enHarshitShuklaBelum ada peringkat
- U6csa18 Data Communication and Computer Networksl T P c3 0 0 3Dokumen2 halamanU6csa18 Data Communication and Computer Networksl T P c3 0 0 3Vinoth KumarBelum ada peringkat
- 8a. Scratch-3.0-for-Inclusive-LearningDokumen31 halaman8a. Scratch-3.0-for-Inclusive-LearningAvram MarianBelum ada peringkat
- Level 50 - How Can CSP Partners Build A Business With AzureDokumen56 halamanLevel 50 - How Can CSP Partners Build A Business With Azureaki koshaBelum ada peringkat
- Thyristor Voltage Controller - 100494PDokumen15 halamanThyristor Voltage Controller - 100494PNishanga SandamalBelum ada peringkat
- Bartender BrochureDokumen13 halamanBartender Brochuren_santhoshuBelum ada peringkat
- Excel 2010 Data AnalysisDokumen6 halamanExcel 2010 Data AnalysisHugo MartinsBelum ada peringkat