Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
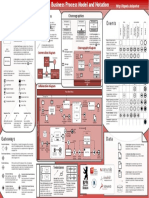
- Bpmn2 0 Poster enDokumen1 halamanBpmn2 0 Poster enTubora100% (1)
- Electric Motor Vibration Diagnostic ChartDokumen1 halamanElectric Motor Vibration Diagnostic ChartfazzlieBelum ada peringkat
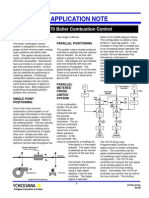
- YS170 Boiler Combustion Control Application NoteDokumen2 halamanYS170 Boiler Combustion Control Application NoteSergio GonzalesBelum ada peringkat
- Aristotle - On Memory and ReminiscenceDokumen8 halamanAristotle - On Memory and ReminiscenceSergio GonzalesBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- SolidWorks Motion TutorialsDokumen358 halamanSolidWorks Motion TutorialsCarlos Garza85% (13)
- MSC - Adams TutorialDokumen17 halamanMSC - Adams Tutorialjuandpg0% (1)
- Competitor Analysis WorksheetDokumen2 halamanCompetitor Analysis WorksheetSergio GonzalesBelum ada peringkat
- Project AssignmentDokumen10 halamanProject AssignmentSergio GonzalesBelum ada peringkat
- PLC Training Course by AhmedelsisyDokumen91 halamanPLC Training Course by Ahmedelsisymohamed_amri10067% (3)
- Da Vinci, Leonardo - The Notebooks of PDFDokumen526 halamanDa Vinci, Leonardo - The Notebooks of PDFSergio GonzalesBelum ada peringkat
- Zone Selectivity With Early Fault DetectionDokumen20 halamanZone Selectivity With Early Fault DetectionpavloneBelum ada peringkat
- Ecpe IbDokumen24 halamanEcpe Ibanna74737377Belum ada peringkat
- Batch and Continuos ProcessDokumen4 halamanBatch and Continuos ProcessSergio GonzalesBelum ada peringkat
- Zone Selectivity With Early Fault DetectionDokumen20 halamanZone Selectivity With Early Fault DetectionpavloneBelum ada peringkat
- Definition of Accounting: - Accounting Is A System For Recording Information About BusinessDokumen5 halamanDefinition of Accounting: - Accounting Is A System For Recording Information About Businesstania7642Belum ada peringkat
- GFWLIVESetup Log VerboseDokumen3 halamanGFWLIVESetup Log Verboseanake7777Belum ada peringkat
- Confucius - Great LearningDokumen5 halamanConfucius - Great LearningSergio GonzalesBelum ada peringkat
- Choked FlowDokumen4 halamanChoked Flowroberto_man5003Belum ada peringkat
- HD44780U (LCD-II) : (Dot Matrix Liquid Crystal Display Controller/Driver)Dokumen59 halamanHD44780U (LCD-II) : (Dot Matrix Liquid Crystal Display Controller/Driver)Alexander Du PlessisBelum ada peringkat
- Process Processbuilder : Processes Programs or Applications. ProcessesDokumen1 halamanProcess Processbuilder : Processes Programs or Applications. ProcessesSergio GonzalesBelum ada peringkat
- Robotics Automation Semester-II Paper-4Dokumen1 halamanRobotics Automation Semester-II Paper-4Sergio GonzalesBelum ada peringkat
- EM Track Curriculum PDFDokumen3 halamanEM Track Curriculum PDFSergio GonzalesBelum ada peringkat
- BP 11 BusinessProcessModellingNewLectureNotesDokumen37 halamanBP 11 BusinessProcessModellingNewLectureNotesSergio GonzalesBelum ada peringkat
- Aristotle - On Dreams (350 BC) PDFDokumen7 halamanAristotle - On Dreams (350 BC) PDFRakeshVadekarBelum ada peringkat
- Confucius - Great LearningDokumen5 halamanConfucius - Great LearningSergio GonzalesBelum ada peringkat
- Confucius - AnalectsDokumen46 halamanConfucius - AnalectsSergio GonzalesBelum ada peringkat
- Aristotle - CategoriesDokumen23 halamanAristotle - CategoriesSergio GonzalesBelum ada peringkat
- 99 Best Business Books Reading ListDokumen5 halaman99 Best Business Books Reading ListSergio Gonzales100% (1)
- Aristotle - On InterpretationDokumen16 halamanAristotle - On InterpretationIulia DavidBelum ada peringkat
- Aristotle - CategoriesDokumen23 halamanAristotle - CategoriesSergio GonzalesBelum ada peringkat
- A Treatise of Human Nature, Book I, Part I (Hume, David)Dokumen15 halamanA Treatise of Human Nature, Book I, Part I (Hume, David)Ehsan AminiBelum ada peringkat
- DFRobot 5 DOF Robot ArmDokumen29 halamanDFRobot 5 DOF Robot ArmC SYAHBANABelum ada peringkat
- Kinematic Analysis of Stanford ArmDokumen31 halamanKinematic Analysis of Stanford ArmabhishekBelum ada peringkat
- ANSYS Hole Tutorial FEM AnalysisDokumen18 halamanANSYS Hole Tutorial FEM AnalysisRajeevSangamBelum ada peringkat
- Determine Structures Types with Static and Kinematic IndeterminacyDokumen13 halamanDetermine Structures Types with Static and Kinematic Indeterminacyazerai2000Belum ada peringkat
- Self Healing Robots - Seminar ReportDokumen33 halamanSelf Healing Robots - Seminar ReportVishnu Ravindran60% (10)
- Eigen Analysis ExampleDokumen4 halamanEigen Analysis ExampleAnonymous PDEpTC4100% (1)
- Mechatronics and Mechanical Engineering in Cyber-Physical SystemsDokumen187 halamanMechatronics and Mechanical Engineering in Cyber-Physical SystemsTulluri Chiranjeevi Anil KumarBelum ada peringkat
- Advanced Structural Analysis: Lecture 1 Vesna Terzic, PH.DDokumen18 halamanAdvanced Structural Analysis: Lecture 1 Vesna Terzic, PH.DBilly JimenezBelum ada peringkat
- Solving Indeterminate Structures - CompatibilityDokumen24 halamanSolving Indeterminate Structures - CompatibilityY SAHITHBelum ada peringkat
- G9. FYP ProposalDokumen9 halamanG9. FYP ProposalSaqlain 6Belum ada peringkat
- Readme PDFDokumen6 halamanReadme PDFSaid EliasBelum ada peringkat
- CSI Analysis ReferenceDokumen474 halamanCSI Analysis ReferenceLaura Alvarez BaezaBelum ada peringkat
- Parts of A Robot, DOF, Classifying Robots PDFDokumen71 halamanParts of A Robot, DOF, Classifying Robots PDFAswath SridharBelum ada peringkat
- Staad ResultsDokumen12 halamanStaad ResultsYisrael AshkenazimBelum ada peringkat
- 07 1 Suspension ConceptsDokumen26 halaman07 1 Suspension ConceptspankajBelum ada peringkat
- Programmable robotic arm control via ArduinoDokumen73 halamanProgrammable robotic arm control via ArduinoSunny mistryBelum ada peringkat
- SolidWorks Motion Simulation Instructor Guide ENGDokumen26 halamanSolidWorks Motion Simulation Instructor Guide ENGabassBelum ada peringkat
- MBD StudyGuide Book Januar2015Dokumen311 halamanMBD StudyGuide Book Januar2015bhukthaBelum ada peringkat
- L1 PDFDokumen41 halamanL1 PDFVENKATA RANGANADHBelum ada peringkat
- Fundamentals of Robot Technology - An Introduction To Industrial Robots, Teleoperators and Robot Vehicles PDFDokumen238 halamanFundamentals of Robot Technology - An Introduction To Industrial Robots, Teleoperators and Robot Vehicles PDFAugustino Nguyen Cao ThangBelum ada peringkat
- Technical-Specs Icub RobotDokumen7 halamanTechnical-Specs Icub RobotZi MuBelum ada peringkat
- TOM EME-653 lAB MANUAL1Dokumen41 halamanTOM EME-653 lAB MANUAL1kotika_somarajuBelum ada peringkat
- Laboratory Manual: Robotics LabDokumen35 halamanLaboratory Manual: Robotics LabTeja's SecondaryBelum ada peringkat
- Development of A Two-Wheeled Mobile Tilting & Balancing (MTB) RobotDokumen6 halamanDevelopment of A Two-Wheeled Mobile Tilting & Balancing (MTB) RobotAs'ad Syamsul ArifinBelum ada peringkat
- Lec 2 Robot ManipulatorsDokumen14 halamanLec 2 Robot ManipulatorsAjanthan AlagaratnamBelum ada peringkat
- Mechanism Mobility and A Local Dimension TestDokumen26 halamanMechanism Mobility and A Local Dimension TestSURESH KUMAR APBelum ada peringkat
- F 200ibDokumen2 halamanF 200ibRoby FahmiBelum ada peringkat