Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (890)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (72)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Tech Note 1008 - Storing Alarms in SP2014 HistorianDokumen13 halamanTech Note 1008 - Storing Alarms in SP2014 HistorianАнтонBelum ada peringkat
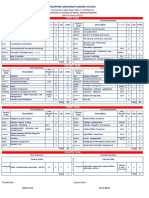
- Philippine Merchant Marine School: First YearDokumen5 halamanPhilippine Merchant Marine School: First YearCris Mhar Alejandro100% (1)
- Mid Term Essay Writing RyandikhaDokumen5 halamanMid Term Essay Writing RyandikhaRyandikha OktaviandiBelum ada peringkat
- HP EliteBook 2540P Compal LA-5251P Swatch-UMA Rev 0.9 SchematicsDokumen47 halamanHP EliteBook 2540P Compal LA-5251P Swatch-UMA Rev 0.9 SchematicsRama MamethBelum ada peringkat
- FILO - Student Ambassador ProgramDokumen5 halamanFILO - Student Ambassador ProgramVansh ChoudharyBelum ada peringkat
- Ella Mae C. Acla Resume 2023 PDFDokumen2 halamanElla Mae C. Acla Resume 2023 PDFMark Wilber Diano GuzonBelum ada peringkat
- Gensler Design Forecast 2013Dokumen43 halamanGensler Design Forecast 2013Pete PetrášBelum ada peringkat
- Dongleserver 20xusbDokumen8 halamanDongleserver 20xusbmasoodkamaliBelum ada peringkat
- Machine Learning Approach To 5G Infrastructure Market Optimization - Bega Et Al. 2019Dokumen16 halamanMachine Learning Approach To 5G Infrastructure Market Optimization - Bega Et Al. 2019Evenso NdlovuBelum ada peringkat
- Wavestate: Editor/Librarian Owner's ManualDokumen24 halamanWavestate: Editor/Librarian Owner's ManualRobson LuisBelum ada peringkat
- MS-RPC UUID Mappings - Juniper NetworksDokumen4 halamanMS-RPC UUID Mappings - Juniper NetworksMobileDickBelum ada peringkat
- Piping Speciality ItemDokumen29 halamanPiping Speciality Itemshoghi wisesaBelum ada peringkat
- ScadaDokumen3 halamanScadaAkira SatoBelum ada peringkat
- Malaysia Rail Industry - A SnapshotDokumen25 halamanMalaysia Rail Industry - A SnapshotRushdi Rahim100% (3)
- Careless Whisper SeetherDokumen10 halamanCareless Whisper SeetherPrasetya Ismail PermadiBelum ada peringkat
- Commodore 64 Programmer's Reference GuideDokumen395 halamanCommodore 64 Programmer's Reference GuidemjmtBelum ada peringkat
- Form Emsd Ee Ct2B: Fresh Water Cooling Towers Scheme Notification of Completion of Cooling Tower InstallationDokumen3 halamanForm Emsd Ee Ct2B: Fresh Water Cooling Towers Scheme Notification of Completion of Cooling Tower InstallationSimoncarter LawBelum ada peringkat
- Fahad Chemical Study PlaneDokumen3 halamanFahad Chemical Study PlaneBadrul IslamBelum ada peringkat
- Blue Shadow FlyerDokumen2 halamanBlue Shadow FlyerPCBelum ada peringkat
- Specifications BOOKLET 6Dokumen456 halamanSpecifications BOOKLET 6Ahmad Omar100% (1)
- TJ 810D 1110D EngDokumen14 halamanTJ 810D 1110D EngDavid StepićBelum ada peringkat
- Anushka Saha CVDokumen2 halamanAnushka Saha CVabhishekroyitBelum ada peringkat
- Industrial Engineering and Management by Ravi V PDFDokumen2 halamanIndustrial Engineering and Management by Ravi V PDFErin BarryBelum ada peringkat
- AVCCDokumen3 halamanAVCCTanya WilkersonBelum ada peringkat
- Automotive RelaysDokumen195 halamanAutomotive RelaysKhuyen NguyenBelum ada peringkat
- Apple Watch Series 3 - Apple (AU)Dokumen1 halamanApple Watch Series 3 - Apple (AU)garethBelum ada peringkat
- Designing Super-Regenerative ReceiversDokumen20 halamanDesigning Super-Regenerative ReceiversDwight MorrisonBelum ada peringkat
- (Delta Power) Esaa250-Haa Series r00 - VNPT NetDokumen5 halaman(Delta Power) Esaa250-Haa Series r00 - VNPT NetSangyup LeeBelum ada peringkat
- Coconut Husk As An Alternative Bio InkDokumen3 halamanCoconut Husk As An Alternative Bio Inkkensu buenaventura100% (2)
- Website Posting in STEAG SiteDokumen58 halamanWebsite Posting in STEAG SiteAnkush VermaBelum ada peringkat