Anda mungkin juga menyukai
- Beginners Python Cheat Sheet PCC All PDFDokumen26 halamanBeginners Python Cheat Sheet PCC All PDFName100% (1)
- Von Mises Yield CriterionDokumen4 halamanVon Mises Yield Criterionletter_ashish4444Belum ada peringkat
- Ansys Quick TipsDokumen12 halamanAnsys Quick Tipsletter_ashish4444100% (1)
- Executive Assessment Prep: Quantitative ReasoningDokumen39 halamanExecutive Assessment Prep: Quantitative ReasoningSai Sunil ChandraaBelum ada peringkat
- Holt Algebra 1 - Chapter 03 TestDokumen8 halamanHolt Algebra 1 - Chapter 03 TestStanleyBelum ada peringkat
- SEAMO Paper DDokumen108 halamanSEAMO Paper Dteacherheinko100% (5)
- A Brief Visit To 3D RotationsDokumen5 halamanA Brief Visit To 3D RotationsbenyfirstBelum ada peringkat
- Bianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityDokumen8 halamanBianchi Type-I, type-III and Kantowski-Sachs Solutions in F (T) GravityManuel RodriguesBelum ada peringkat
- Tube Dislocations in GravityDokumen27 halamanTube Dislocations in GravityBayer MitrovicBelum ada peringkat
- Shear-Flexible Element With Warping For Thin-Walled Open BeamsDokumen19 halamanShear-Flexible Element With Warping For Thin-Walled Open BeamsnevinkoshyBelum ada peringkat
- Wedge Dislocation in The Geometric Theory of Defects: M. O. KatanaevDokumen12 halamanWedge Dislocation in The Geometric Theory of Defects: M. O. KatanaevNicolas FernandezBelum ada peringkat
- Alain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDokumen20 halamanAlain Goriely and Michael Tabor - Nonlinear Dynamics of Filaments III: Instabilities of Helical RodsDopameBelum ada peringkat
- Finite Elements in ElasticityDokumen45 halamanFinite Elements in ElasticityRajaram KamathBelum ada peringkat
- Knots IDokumen47 halamanKnots IAkshay AVBelum ada peringkat
- Covariance and Invariance in Physics, The Mathematization of PhysicsDokumen11 halamanCovariance and Invariance in Physics, The Mathematization of PhysicsGeorge Mpantes mathematics teacher100% (1)
- Curl (Mathematics) - Wikipedia, The Free EncyclopediaDokumen10 halamanCurl (Mathematics) - Wikipedia, The Free EncyclopediabmxengineeringBelum ada peringkat
- Second Moment of AreaDokumen9 halamanSecond Moment of AreaPham Cao ThanhBelum ada peringkat
- Christoffel Symbols - WikipediaDokumen12 halamanChristoffel Symbols - WikipediaMarcos SilvaBelum ada peringkat
- Definition of Curvature As Per Different Sources: 1) Wikipedia: Link:-Curvature of Space CurveDokumen2 halamanDefinition of Curvature As Per Different Sources: 1) Wikipedia: Link:-Curvature of Space CurveKarim ShahbazBelum ada peringkat
- Moment of Inertia of Mass, or The Angular Mass, (SI Units KG M ) Is A Measure of An Object's Resistance ToDokumen5 halamanMoment of Inertia of Mass, or The Angular Mass, (SI Units KG M ) Is A Measure of An Object's Resistance ToMuhammad UzairBelum ada peringkat
- Symmetric TensorDokumen5 halamanSymmetric TensorirayoBelum ada peringkat
- S. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthDokumen17 halamanS. Neukirch, G.H.M. Van Der Heijden and J.M.T. Thompson - Writhing Instabilities of Twisted Rods: From Infinite To Finite LengthLokosooBelum ada peringkat
- Tensor Notation: 1.1 Cartesian Frame of ReferenceDokumen28 halamanTensor Notation: 1.1 Cartesian Frame of ReferencesquirreldnaBelum ada peringkat
- Shell Elements ABAQUSDokumen45 halamanShell Elements ABAQUSSsr Saane71% (7)
- Smooth and Discrete Cone NetsDokumen40 halamanSmooth and Discrete Cone NetsvishesharadaBelum ada peringkat
- TensorDokumen20 halamanTensoremma698Belum ada peringkat
- Differential FormDokumen15 halamanDifferential FormjosgauBelum ada peringkat
- Conical Singularities and TorsionDokumen11 halamanConical Singularities and TorsionNicolas FernandezBelum ada peringkat
- Symmetrically Loaded Shells of Revolution in Membrane TheoryDokumen17 halamanSymmetrically Loaded Shells of Revolution in Membrane TheoryAnca BirisBelum ada peringkat
- Linear ElasticityDokumen10 halamanLinear Elasticityaishwarya25singhBelum ada peringkat
- Tensor Field: 1 Geometric IntroductionDokumen4 halamanTensor Field: 1 Geometric Introductionjaswinder singhBelum ada peringkat
- Mathematics For ElectromagnetismDokumen20 halamanMathematics For ElectromagnetismPradeep RajasekeranBelum ada peringkat
- General Principles of Brane Kinematics and DynamicsDokumen12 halamanGeneral Principles of Brane Kinematics and DynamicsOliver BardinBelum ada peringkat
- Infinitesimal Strain TheoryDokumen13 halamanInfinitesimal Strain Theoryrpraj3135Belum ada peringkat
- Fluid Flow Versus Geometric DynamicsDokumen13 halamanFluid Flow Versus Geometric DynamicsDragos IsvoranuBelum ada peringkat
- Riemann Curvature TensorDokumen6 halamanRiemann Curvature TensorjosgauBelum ada peringkat
- Cross Sectional Properties of Thin-Walled Composite Beams: 16 International Conference On Composite MaterialsDokumen7 halamanCross Sectional Properties of Thin-Walled Composite Beams: 16 International Conference On Composite MaterialsAndras ZajBelum ada peringkat
- Rigid Foldable Structure From Space Curve Tachi IASS2011Dokumen8 halamanRigid Foldable Structure From Space Curve Tachi IASS2011alan garcia reyesBelum ada peringkat
- Timoshenko CoefficientDokumen6 halamanTimoshenko CoefficientwarterflyBelum ada peringkat
- On The Geometry of Generalized MetricsDokumen35 halamanOn The Geometry of Generalized MetricsMike AlexBelum ada peringkat
- Simple Bending TheoryDokumen11 halamanSimple Bending TheoryAnonymous 2RduvkjgZBelum ada peringkat
- Almost Hermitian CurvatureDokumen34 halamanAlmost Hermitian CurvatureTimothy PonepalBelum ada peringkat
- Finite Strain and Strain EllipsoideDokumen27 halamanFinite Strain and Strain EllipsoideJorgeBarriosMurielBelum ada peringkat
- CAG 2005 0013 0003 A005Dokumen41 halamanCAG 2005 0013 0003 A005izan aznarBelum ada peringkat
- GroupTheory VVDokumen253 halamanGroupTheory VVHridey GuptaBelum ada peringkat
- Elastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainDokumen7 halamanElastic Behavior of Materials: Continuum Aspects: 1. Deformation and StrainNawar TahaBelum ada peringkat
- Brannon - Large Deformation KinematicsDokumen66 halamanBrannon - Large Deformation KinematicsPatrick SummersBelum ada peringkat
- CH 05Dokumen72 halamanCH 05LeonardoMadeira110% (1)
- Moment of InertiaDokumen18 halamanMoment of InertiaAbdullah Mofarrah100% (1)
- Introduction To The Theory of PlatesDokumen41 halamanIntroduction To The Theory of PlatesCHANDRA MANI GUPTABelum ada peringkat
- RQM PDF 15296Dokumen40 halamanRQM PDF 15296jaburicoBelum ada peringkat
- Parallel TransportDokumen16 halamanParallel TransportSantiago CasasBelum ada peringkat
- Basics of CrystallographyDokumen60 halamanBasics of Crystallographylmanna454Belum ada peringkat
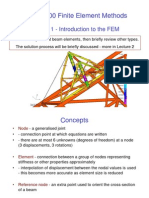
- MECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMDokumen15 halamanMECH3300 Finite Element Methods: Lecture 1 - Introduction To The FEMKrishna MyakalaBelum ada peringkat
- Torsion of A CurveDokumen3 halamanTorsion of A CurveewbBelum ada peringkat
- Generalized CoordinatesDokumen8 halamanGeneralized CoordinatesJoshua WoodBelum ada peringkat
- Chapter 2 Lecture NoteDokumen19 halamanChapter 2 Lecture NoteeyobBelum ada peringkat
- Material Science 2Dokumen9 halamanMaterial Science 2nijju2009Belum ada peringkat
- Deformation PDFDokumen66 halamanDeformation PDFRicardo ColosimoBelum ada peringkat
- Introduction To Mathematics of General RelativityDokumen10 halamanIntroduction To Mathematics of General Relativityimanarrovi100% (2)
- Free VibrationDokumen25 halamanFree VibrationXiaomin XuBelum ada peringkat
- 2014 Zhang Book Chapter Divergence GeometryDokumen27 halaman2014 Zhang Book Chapter Divergence GeometrysggtioBelum ada peringkat
- Mechanical Stress DefinitionDokumen6 halamanMechanical Stress DefinitionhumejiasBelum ada peringkat
- Anomalies in Quantum Field Theory: Marco SeroneDokumen48 halamanAnomalies in Quantum Field Theory: Marco SeronetrevorscheopnerBelum ada peringkat
- Mementopython3 English PDFDokumen2 halamanMementopython3 English PDFPavsterSizBelum ada peringkat
- Python HistoryDokumen3 halamanPython Historyletter_ashish4444Belum ada peringkat
- Variational Methods Numerical Analysis - LangtevanDokumen431 halamanVariational Methods Numerical Analysis - LangtevanatankasalaBelum ada peringkat
- 10 Viscoelasticity 04 Hereditaory PDFDokumen12 halaman10 Viscoelasticity 04 Hereditaory PDFletter_ashish4444Belum ada peringkat
- Ceramic: For Other Uses, See - A Ceramic Is An, NonmetallicDokumen7 halamanCeramic: For Other Uses, See - A Ceramic Is An, Nonmetallicletter_ashish4444Belum ada peringkat
- Matplotlib HandoutDokumen30 halamanMatplotlib Handoutletter_ashish4444Belum ada peringkat
- Xbar and R ChartDokumen2 halamanXbar and R Chartletter_ashish4444Belum ada peringkat
- Flexible Manufacturing SystemDokumen3 halamanFlexible Manufacturing Systemletter_ashish4444Belum ada peringkat
- Numerical ControlDokumen6 halamanNumerical Controlletter_ashish4444Belum ada peringkat
- Rapid PrototypingDokumen4 halamanRapid Prototypingletter_ashish4444Belum ada peringkat
- MechatronicsDokumen4 halamanMechatronicsletter_ashish4444Belum ada peringkat
- NP ChartDokumen2 halamanNP Chartletter_ashish4444Belum ada peringkat
- Tensile TestingDokumen4 halamanTensile Testingletter_ashish4444Belum ada peringkat
- Stress-Strain CurveDokumen4 halamanStress-Strain Curveletter_ashish4444Belum ada peringkat
- ManagementDokumen10 halamanManagementletter_ashish4444Belum ada peringkat
- Composite Material PDFDokumen10 halamanComposite Material PDFjaviercdeaeBelum ada peringkat
- Washer (Hardware)Dokumen5 halamanWasher (Hardware)letter_ashish4444Belum ada peringkat
- Nominal Pipe SizeDokumen6 halamanNominal Pipe Sizeletter_ashish4444Belum ada peringkat
- Composite Material PDFDokumen10 halamanComposite Material PDFjaviercdeaeBelum ada peringkat
- Nonlinear SystemDokumen6 halamanNonlinear Systemletter_ashish4444Belum ada peringkat
- Finite Element BasicsDokumen76 halamanFinite Element Basicsletter_ashish4444Belum ada peringkat
- 2013 Grand I10 Ebrochure 1378277186464Dokumen4 halaman2013 Grand I10 Ebrochure 1378277186464Ashutosh SharmaBelum ada peringkat
- Weld Design by FEADokumen11 halamanWeld Design by FEAAdarsh D. KarkiBelum ada peringkat
- Finite Element BasicsDokumen76 halamanFinite Element Basicsletter_ashish4444Belum ada peringkat
- Definitions of Financial ManagementDokumen2 halamanDefinitions of Financial Managementletter_ashish4444Belum ada peringkat
- Hamilton's PrincipleDokumen8 halamanHamilton's Principleletter_ashish4444Belum ada peringkat
- Latexsheet A4 PDFDokumen2 halamanLatexsheet A4 PDFDagoniatBelum ada peringkat
- Arcs and Central AnglesDokumen7 halamanArcs and Central AnglesARIEL KIMBelum ada peringkat
- Math (203) 182000610Dokumen13 halamanMath (203) 182000610Abu Shamim EmonBelum ada peringkat
- GE 4 Module 4Dokumen25 halamanGE 4 Module 4Christian DumotBelum ada peringkat
- 4 Applications of The Definite Integral: 4.1 Area Between Two CurvesDokumen12 halaman4 Applications of The Definite Integral: 4.1 Area Between Two CurvesEric James MalotBelum ada peringkat
- List of Mathematical Symbols - Wikipedia PDFDokumen22 halamanList of Mathematical Symbols - Wikipedia PDFChorinho Atkinson LaurieBelum ada peringkat
- CSS Animations Sample CodesDokumen10 halamanCSS Animations Sample CodesElla LopezBelum ada peringkat
- 30 IntegrationDokumen3 halaman30 IntegrationimaniceguyBelum ada peringkat
- Relations and Functions AnswersDokumen2 halamanRelations and Functions AnswersayeshaBelum ada peringkat
- International Journal of Mechanical Sciences: X. Zhao, Q.J. Hu, W. Crossley, C.C. Du, Y.H. LiDokumen17 halamanInternational Journal of Mechanical Sciences: X. Zhao, Q.J. Hu, W. Crossley, C.C. Du, Y.H. Linadeemq_0786Belum ada peringkat
- Dwnload Full Data Abstraction and Problem Solving With C Walls and Mirrors 6th Edition Carrano Test Bank PDFDokumen36 halamanDwnload Full Data Abstraction and Problem Solving With C Walls and Mirrors 6th Edition Carrano Test Bank PDFlesliepooleutss100% (14)
- NTSE - (Reasoning) Worksheet - 6Dokumen2 halamanNTSE - (Reasoning) Worksheet - 6siva0% (1)
- 2.4 Exact Differential EquationDokumen13 halaman2.4 Exact Differential EquationNurathirahBelum ada peringkat
- DS Chapter 06Dokumen53 halamanDS Chapter 06Asim AliBelum ada peringkat
- Histo MathDokumen4 halamanHisto Mathmain.fritzhervin.alfonsoBelum ada peringkat
- Software For Enumerative and Analytic CombinatoricsDokumen47 halamanSoftware For Enumerative and Analytic CombinatoricsamacfiesBelum ada peringkat
- Robotics Kinematics and DynamicsDokumen24 halamanRobotics Kinematics and Dynamicsأحمد دعبسBelum ada peringkat
- FP1 Revision SheetDokumen3 halamanFP1 Revision SheetKeshan Asbury100% (1)
- Laplace QuestionsDokumen49 halamanLaplace QuestionsAmit Thakur100% (1)
- Es Table Grade 6 Pba Mya For Parcc FinalDokumen8 halamanEs Table Grade 6 Pba Mya For Parcc Finalapi-115680157Belum ada peringkat
- Geometry Circle ProblemsDokumen26 halamanGeometry Circle ProblemsMohit KalalBelum ada peringkat
- Computational Techniques in Civil Engineering Tutorials (Water Resources Part)Dokumen6 halamanComputational Techniques in Civil Engineering Tutorials (Water Resources Part)yeee boiiiBelum ada peringkat
- EECE 301 Signals & Systems Prof. Mark Fowler: Note Set #12Dokumen8 halamanEECE 301 Signals & Systems Prof. Mark Fowler: Note Set #12ahmdBelum ada peringkat
- Eureka Mathtips For Parentsgrade 3 Module 3Dokumen2 halamanEureka Mathtips For Parentsgrade 3 Module 3api-261399250Belum ada peringkat
- X Marking Scheme Maths StandardDokumen3 halamanX Marking Scheme Maths Standardsn dBelum ada peringkat
- TOS First Quarter Gen Math 11Dokumen2 halamanTOS First Quarter Gen Math 11Rey Anthony B. NiereBelum ada peringkat
- Nonlinear Functional Analysis and Its ApplicationsDokumen148 halamanNonlinear Functional Analysis and Its ApplicationsAntonio avilaBelum ada peringkat
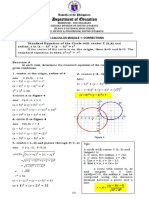
- PreCal Module 1 CorrectionDokumen4 halamanPreCal Module 1 CorrectionAyengBelum ada peringkat