Anda mungkin juga menyukai
- Seminario Vivir Con Abundancia Mayo 2020 PDFDokumen2 halamanSeminario Vivir Con Abundancia Mayo 2020 PDFOscar ChacónBelum ada peringkat
- PMA Lubricadora Maria MarquezDokumen103 halamanPMA Lubricadora Maria Marquezluchito70Belum ada peringkat
- 8 Accesos Directos A La Motivacion y El Deseo PDFDokumen35 halaman8 Accesos Directos A La Motivacion y El Deseo PDFAlmir Gomez100% (1)
- Seminario Vivir Con Abundancia Mayo 2020 PDFDokumen2 halamanSeminario Vivir Con Abundancia Mayo 2020 PDFOscar ChacónBelum ada peringkat
- NTP 366Dokumen8 halamanNTP 366Oscar ChacónBelum ada peringkat
- Resumen Ejecutivo Se Daule NorteDokumen115 halamanResumen Ejecutivo Se Daule NorteOscar ChacónBelum ada peringkat
- ValvulasDokumen10 halamanValvulasOscar ChacónBelum ada peringkat
- Fabula La-Cigarra-Y-La-Hormiga PDFDokumen7 halamanFabula La-Cigarra-Y-La-Hormiga PDFprofesoralucy100% (2)
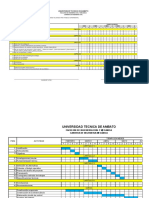
- Cronograma ValoradoDokumen5 halamanCronograma ValoradoOscar ChacónBelum ada peringkat
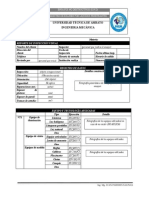
- Informe VisualDokumen2 halamanInforme VisualOscar ChacónBelum ada peringkat
- 2Dokumen1 halaman2Oscar ChacónBelum ada peringkat
- Te or I A Delos Vari Adores de VelocidadDokumen9 halamanTe or I A Delos Vari Adores de VelocidadOscar ChacónBelum ada peringkat
- Generación Eólica V2014Dokumen74 halamanGeneración Eólica V2014Oscar ChacónBelum ada peringkat
- Refrigerant EsDokumen5 halamanRefrigerant EsOscar ChacónBelum ada peringkat
- Control AdoresDokumen25 halamanControl AdoresJhank MansbachBelum ada peringkat
- 2 PDFDokumen4 halaman2 PDFOscar ChacónBelum ada peringkat
- Segunda PresentaciónDokumen42 halamanSegunda PresentaciónOscar ChacónBelum ada peringkat
- MOLDE1Dokumen1 halamanMOLDE1Oscar ChacónBelum ada peringkat
- Libro Gestion EmpresarialDokumen297 halamanLibro Gestion Empresarialevilaso100% (10)
- Engranajes 2Dokumen14 halamanEngranajes 2Oscar ChacónBelum ada peringkat
- PMA Lubricadora Maria MarquezDokumen103 halamanPMA Lubricadora Maria Marquezluchito70Belum ada peringkat
- Libro Gestion EmpresarialDokumen297 halamanLibro Gestion Empresarialevilaso100% (10)
- Información del deudor y garantía para préstamoDokumen1 halamanInformación del deudor y garantía para préstamoOscar ChacónBelum ada peringkat
- 1 Estructura Organica FuncionalDokumen1 halaman1 Estructura Organica FuncionalOscar ChacónBelum ada peringkat
- Teoria I Proceso de InyeccionDokumen13 halamanTeoria I Proceso de InyeccionArmando Cely V.Belum ada peringkat
- OficioDokumen1 halamanOficioOscar ChacónBelum ada peringkat
- DepreciacionesDokumen3 halamanDepreciacionesOscar ChacónBelum ada peringkat
- Eloy AlfaroDokumen2 halamanEloy AlfaroOscar ChacónBelum ada peringkat
- Fresas de 2 y 4 LabiosDokumen14 halamanFresas de 2 y 4 Labiosricardogarcia23Belum ada peringkat
- Modelo Cinematico BCN3DDokumen14 halamanModelo Cinematico BCN3DLucho Alex Juarez MecheBelum ada peringkat
- Ecuaciones Brazo Robótico (15.5, 13, 18Dokumen5 halamanEcuaciones Brazo Robótico (15.5, 13, 18victor hugo matos guerreroBelum ada peringkat
- Marco Teórico Del Brazo RoboticoDokumen8 halamanMarco Teórico Del Brazo RoboticoOscarPattenden100% (1)
- Robot guiado por manoDokumen1 halamanRobot guiado por manoGeorge LucasBelum ada peringkat
- Robot ManipuladorDokumen5 halamanRobot ManipuladorEduardo CaballeroBelum ada peringkat
- DefinitivoDokumen13 halamanDefinitivoValeria StaitiBelum ada peringkat
- 4 - JacobianoDokumen31 halaman4 - JacobianoDario RosoBelum ada peringkat
- Informe Final de ProyectoDokumen62 halamanInforme Final de ProyectoFrancisco Javier Esquivel VenturaBelum ada peringkat
- Tif Mecanica Racional 2-OficialDokumen9 halamanTif Mecanica Racional 2-OficialANDERSON GIRON MAMANIBelum ada peringkat
- Cinematica IntroduccionDokumen5 halamanCinematica IntroduccionDanielBelum ada peringkat
- Dinamica de Multicuerpos Informe 2 UNIDokumen13 halamanDinamica de Multicuerpos Informe 2 UNIPio Quispe GarciaBelum ada peringkat
- GUI para Control y Monitoreo de Robot Mitsubishi RV3SBDokumen22 halamanGUI para Control y Monitoreo de Robot Mitsubishi RV3SBIsmael PortilloBelum ada peringkat
- Proyecto Final. Cedula de Manufactura AutomatizadaDokumen19 halamanProyecto Final. Cedula de Manufactura AutomatizadaMartin StrikeBelum ada peringkat
- Analisis Cinematico e Inverso Del Robot PUMADokumen25 halamanAnalisis Cinematico e Inverso Del Robot PUMAWALTER MAX MONTAÑO CAMACHO100% (1)
- ClaseREPASO Temas 1 2 3 Resultados-2Dokumen66 halamanClaseREPASO Temas 1 2 3 Resultados-2Jean Carlos Barragan VillaBelum ada peringkat
- Traduccion de Theory Applied RoboticsDokumen74 halamanTraduccion de Theory Applied RoboticsKenny Torres LunaBelum ada peringkat
- Informe Robotica IndustrialDokumen9 halamanInforme Robotica IndustrialPLASTICOS BYRBelum ada peringkat
- A Prendi Endo Maya 2Dokumen546 halamanA Prendi Endo Maya 2guilloteARGBelum ada peringkat
- Pid 00162685Dokumen8 halamanPid 00162685circomaximoBelum ada peringkat
- Guia ACA ANIMATE CC - SPADokumen20 halamanGuia ACA ANIMATE CC - SPAEdgard CAJACHAHUA ROJASBelum ada peringkat
- Paso1 VictorJimenezDokumen18 halamanPaso1 VictorJimenezvimaji89Belum ada peringkat
- Tema 5 Cinematica InversaDokumen17 halamanTema 5 Cinematica InversaPEDRO ALEJANDRO MENDOZABelum ada peringkat
- Cinematica Inversa y DirectaDokumen4 halamanCinematica Inversa y DirectaDenisBelum ada peringkat
- Tipos de Modelado CinematicoDokumen5 halamanTipos de Modelado CinematicoJorge MendezBelum ada peringkat
- Examen Final Intro RobóticaDokumen3 halamanExamen Final Intro RobóticaJuan Felipe SanchezBelum ada peringkat
- CirosRobotics 2013 I HSDokumen50 halamanCirosRobotics 2013 I HSDaniel Henao SantanaBelum ada peringkat
- Simulador Brazo RobotDokumen3 halamanSimulador Brazo RobotCarlos PavaBelum ada peringkat
- Evaluacion T3: Carrera de Ingenier A Mecatronica Curso: RoboticaDokumen4 halamanEvaluacion T3: Carrera de Ingenier A Mecatronica Curso: RoboticaBaki HanmaBelum ada peringkat