Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- TStipsDokumen2 halamanTStipsSteveAbonyiBelum ada peringkat
- Waterpurifier: Mobile Drinking Water Treatment SystemDokumen4 halamanWaterpurifier: Mobile Drinking Water Treatment SystemSteveAbonyiBelum ada peringkat
- Gtai PV Manufacturers Gtai 150813 TRDokumen2 halamanGtai PV Manufacturers Gtai 150813 TRSteveAbonyiBelum ada peringkat
- Photovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeDokumen2 halamanPhotovoltaic R&D in Germany: First-Class Research Partnerships Ensure A Sustainable EdgeSteveAbonyiBelum ada peringkat
- Tsin STRDokumen2 halamanTsin STRSteveAbonyiBelum ada peringkat
- Cancer Killer EngDokumen9 halamanCancer Killer EngSteveAbonyiBelum ada peringkat
- ZMP - 1131232 Osram Led TubeDokumen4 halamanZMP - 1131232 Osram Led TubeSteveAbonyiBelum ada peringkat
- Teslahighfrequency Coil PDFDokumen156 halamanTeslahighfrequency Coil PDFMartin OngBelum ada peringkat
- Thermocam WebDokumen1 halamanThermocam WebSteveAbonyiBelum ada peringkat
- Skull 2013Dokumen11 halamanSkull 2013SteveAbonyiBelum ada peringkat
- 2213 ISE PI e World Record Solar CellDokumen6 halaman2213 ISE PI e World Record Solar CellSteveAbonyiBelum ada peringkat
- Quotation StreetlightDokumen12 halamanQuotation StreetlightSteveAbonyiBelum ada peringkat
- LIDAR Lite Data SheetDokumen2 halamanLIDAR Lite Data SheetSteveAbonyiBelum ada peringkat
- LLLT of Eye and BrainDokumen19 halamanLLLT of Eye and BrainSteveAbonyiBelum ada peringkat
- English in 20 Minutes A Day (1-6)Dokumen289 halamanEnglish in 20 Minutes A Day (1-6)Anonymous wVxfrbkz9100% (2)
- LM80 Results CREE LedDokumen40 halamanLM80 Results CREE LedSteveAbonyiBelum ada peringkat
- NEC Projector Lt265 ManualDokumen145 halamanNEC Projector Lt265 ManualSteveAbonyiBelum ada peringkat
- Condensed Intro To Tesla Transformers - Eric DollardDokumen59 halamanCondensed Intro To Tesla Transformers - Eric Dollard~ScaLaR~100% (4)
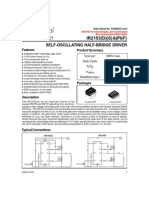
- Ir 2153Dokumen9 halamanIr 2153SteveAbonyiBelum ada peringkat
- Force On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)Dokumen38 halamanForce On An Asymmetric Capacitor (Antigravity Ufo, Army Report Arl-Tr-3005)SteveAbonyiBelum ada peringkat
- XKeyscore Slideshow Leaked by The GuardianDokumen32 halamanXKeyscore Slideshow Leaked by The GuardianMatthew Keys100% (2)
- Quotation StreetlightDokumen12 halamanQuotation StreetlightSteveAbonyiBelum ada peringkat
- Crest LED Lighting Catalogue 2015Dokumen98 halamanCrest LED Lighting Catalogue 2015SteveAbonyiBelum ada peringkat
- Munkafüzet Megoldásai - Nyelvtan - Leckék Szavai 1-6 Stage English - in - 20 - Minutes - A - DayDokumen31 halamanMunkafüzet Megoldásai - Nyelvtan - Leckék Szavai 1-6 Stage English - in - 20 - Minutes - A - Daykovaron80Belum ada peringkat
- Montauk ProjectDokumen8 halamanMontauk ProjectSteveAbonyiBelum ada peringkat
- Terrawatt LaserDokumen69 halamanTerrawatt LaserSteveAbonyiBelum ada peringkat
- Upower Analog 2Q08 Calpoly SM FinalDokumen36 halamanUpower Analog 2Q08 Calpoly SM FinalSteveAbonyiBelum ada peringkat
- Superstrings TheoryDokumen31 halamanSuperstrings TheorySteveAbonyiBelum ada peringkat
- H.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarDokumen2 halamanH.A.W.System Vehicle H.A.W.System Vehicle: Hydrogen CarSteveAbonyiBelum ada peringkat
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (120)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- CCNA Training New CCNA - RSTPDokumen7 halamanCCNA Training New CCNA - RSTPokotete evidenceBelum ada peringkat
- Surface Finish Measurement NotesDokumen32 halamanSurface Finish Measurement NotesAneez ShresthaBelum ada peringkat
- Comparative Study On Serial and Parallel Manipulators - ReviewDokumen23 halamanComparative Study On Serial and Parallel Manipulators - ReviewShaik Himam SahebBelum ada peringkat
- ECE199R-C12 Final Document OJTDokumen48 halamanECE199R-C12 Final Document OJTRigel ZabateBelum ada peringkat
- Bulk Material/Part Ppap Process Checklist / Approval: Required?Dokumen32 halamanBulk Material/Part Ppap Process Checklist / Approval: Required?krds chidBelum ada peringkat
- VavDokumen8 halamanVavkprasad_56900Belum ada peringkat
- Isulat Lamang Ang Titik NG Tamang Sagot Sa Inyong Papel. (Ilagay Ang Pangalan, Section atDokumen1 halamanIsulat Lamang Ang Titik NG Tamang Sagot Sa Inyong Papel. (Ilagay Ang Pangalan, Section atMysterious StudentBelum ada peringkat
- Worksheet - 143760187HS-II, TUTORIAL ON CH-5Dokumen14 halamanWorksheet - 143760187HS-II, TUTORIAL ON CH-5A MusaverBelum ada peringkat
- Javanese PeopleDokumen22 halamanJavanese PeopleDenisaBelum ada peringkat
- G10Mapeh Exam First QuaterDokumen8 halamanG10Mapeh Exam First QuaterJonas LamcisBelum ada peringkat
- Đề 17Dokumen11 halamanĐề 17Nguyen CuongBelum ada peringkat
- Goa Daman & Diu Factory Rules PDFDokumen141 halamanGoa Daman & Diu Factory Rules PDFmrudang1972100% (1)
- SMC VM Eu PDFDokumen66 halamanSMC VM Eu PDFjoguvBelum ada peringkat
- Beastlikebalsam - Muscle BuildingDokumen10 halamanBeastlikebalsam - Muscle BuildingBalsam LaaroussiBelum ada peringkat
- IBM BladeCenter S RedBookDokumen36 halamanIBM BladeCenter S RedBookGuillermo García GándaraBelum ada peringkat
- Orbitol Motor TMTHWDokumen20 halamanOrbitol Motor TMTHWRodolfo ErenoBelum ada peringkat
- Physics Unit 11 NotesDokumen26 halamanPhysics Unit 11 Notesp.salise352Belum ada peringkat
- Matters Signified by The Sublord of 11th Cusp in KP SystemDokumen2 halamanMatters Signified by The Sublord of 11th Cusp in KP SystemHarry HartBelum ada peringkat
- Investigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseDokumen5 halamanInvestigation of Skew Curved Bridges in Combination With Skewed Abutments Under Seismic ResponseEditor IJTSRDBelum ada peringkat
- Clinical Biomechanics: Leigh W. Marshall, Stuart M. McgillDokumen4 halamanClinical Biomechanics: Leigh W. Marshall, Stuart M. McgillMichael JunBelum ada peringkat
- Region 1 - Concreting Works Materials Prices - PHILCON PRICESDokumen9 halamanRegion 1 - Concreting Works Materials Prices - PHILCON PRICESMark Gregory RimandoBelum ada peringkat
- Azure Machine Learning StudioDokumen17 halamanAzure Machine Learning StudioNurain IsmailBelum ada peringkat
- Chillers VoltasDokumen4 halamanChillers Voltasanil shuklaBelum ada peringkat
- DJI F450 Construction Guide WebDokumen21 halamanDJI F450 Construction Guide WebPutu IndrayanaBelum ada peringkat
- Yoga SadhguruDokumen6 halamanYoga Sadhgurucosti.sorescuBelum ada peringkat
- Asaali - Project Estimation - Ce155p-2 - A73Dokumen7 halamanAsaali - Project Estimation - Ce155p-2 - A73Kandhalvi AsaaliBelum ada peringkat
- Bravo MRI II Operation ManualDokumen45 halamanBravo MRI II Operation ManualLuis100% (1)
- Iec60227-3 (Ed2.1) en DDokumen6 halamanIec60227-3 (Ed2.1) en Duntuk donlod aaaBelum ada peringkat
- Manual GA 55 VSD Atlas CompresorDokumen114 halamanManual GA 55 VSD Atlas Compresormondaxa_mme50% (4)
- Rectifier 5G High Density Embedded Power (3U Power Rack, Three Phase Four Wire) E...Dokumen4 halamanRectifier 5G High Density Embedded Power (3U Power Rack, Three Phase Four Wire) E...Lintas LtiBelum ada peringkat