Anda mungkin juga menyukai
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Power Transformer Protection Using Microcontroller-Based RelayDokumen66 halamanPower Transformer Protection Using Microcontroller-Based Relaybisanikumarbabu100% (5)
- Tool 3163151 Bench Calibration Parent CableDokumen3 halamanTool 3163151 Bench Calibration Parent CableArbey Gonzalez100% (2)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
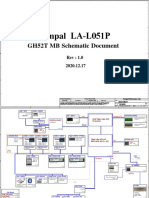
- Compal GH52T LA-L051P Rev 1.0Dokumen121 halamanCompal GH52T LA-L051P Rev 1.0Павел В. (Bis Nival - IrBis Snow)Belum ada peringkat
- CVD Icon LibraryDokumen5 halamanCVD Icon LibraryDonoban MezaBelum ada peringkat
- Catalog Componente Depasite (Obsolete)Dokumen2.433 halamanCatalog Componente Depasite (Obsolete)corneliusflavius713257% (7)
- Uart - Project PresentationDokumen23 halamanUart - Project PresentationGagandeep VirdiBelum ada peringkat
- PackardBell EasyNote ML65 WISTRON SJM50-PUDokumen56 halamanPackardBell EasyNote ML65 WISTRON SJM50-PUu6k5lp l2y3z0Belum ada peringkat
- Apple Iphone 6s Gold 64GB - MNR MOBILESDokumen4 halamanApple Iphone 6s Gold 64GB - MNR MOBILESAbhay ThakurBelum ada peringkat
- What Are The Different Stages of Evolution of Computer Architecture? Explain in DetailDokumen6 halamanWhat Are The Different Stages of Evolution of Computer Architecture? Explain in DetailNeha RaiBelum ada peringkat
- File Organization MidtermDokumen43 halamanFile Organization MidtermJeph PedrigalBelum ada peringkat
- Avago Fiber Optic-Altera AV00-0282EN 040714Dokumen4 halamanAvago Fiber Optic-Altera AV00-0282EN 040714Jaime ColvatelBelum ada peringkat
- CS704 Finalterm QA Past PapersDokumen20 halamanCS704 Finalterm QA Past PapersMuhammad MunirBelum ada peringkat
- ACA Model1 Notes ValarDokumen72 halamanACA Model1 Notes ValarÑíthíñ FérráríBelum ada peringkat
- FlopX NT5.1 Patch V1aDokumen5 halamanFlopX NT5.1 Patch V1aAmilcar AndradeBelum ada peringkat
- Operating Systems Interview Questions You'll Most Likely Be AskedDokumen22 halamanOperating Systems Interview Questions You'll Most Likely Be AskedVibrant PublishersBelum ada peringkat
- 386DX-AD5M Motherboard - Users ManualDokumen42 halaman386DX-AD5M Motherboard - Users ManualAndrew NikonovBelum ada peringkat
- RTO UserManual en 17Dokumen2.802 halamanRTO UserManual en 17Ken OhBelum ada peringkat
- SnooperDokumen132 halamanSnoopertom1330Belum ada peringkat
- Ug1228 Ultrafast Embedded Design Methodology GuideDokumen217 halamanUg1228 Ultrafast Embedded Design Methodology GuidevpsampathBelum ada peringkat
- Adam26p16 AbovDokumen37 halamanAdam26p16 Abovwilson de jesus miranda noreñaBelum ada peringkat
- F-Center: Smart bIOSDokumen1 halamanF-Center: Smart bIOSJAMES ALEXANDER ANTONY GOMEZ CORDOVABelum ada peringkat
- Assignment 1Dokumen4 halamanAssignment 1Akhtar AbbasBelum ada peringkat
- Hitachi Virtual SMU Administration GuideDokumen38 halamanHitachi Virtual SMU Administration GuideAakashBelum ada peringkat
- NT 511740C5J Data Sheet: NT5117405J 4,194,304-Word X 4-Bit Dynamic RAM: Fast Page Mode With EDODokumen18 halamanNT 511740C5J Data Sheet: NT5117405J 4,194,304-Word X 4-Bit Dynamic RAM: Fast Page Mode With EDORaulBelum ada peringkat
- Ecs - A980 1 4 02 PDFDokumen36 halamanEcs - A980 1 4 02 PDFjairoBelum ada peringkat
- Research Activity 2Dokumen5 halamanResearch Activity 2Jastine AnneBelum ada peringkat
- Exercise Chapter 2 (Ahmad f2008)Dokumen12 halamanExercise Chapter 2 (Ahmad f2008)F2056 SyafiqBelum ada peringkat
- KM 6310in ManualDokumen27 halamanKM 6310in ManualCommunications ShipyardBelum ada peringkat
- Time-Adjustable Delay Circuit PDFDokumen8 halamanTime-Adjustable Delay Circuit PDFmmorsy1981Belum ada peringkat
- Pulsar EXtreme - Datasheet - EngDokumen2 halamanPulsar EXtreme - Datasheet - EngMarius MouseBelum ada peringkat