Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Layout Tips For 12-Bit AD Converter Application PDFDokumen7 halamanLayout Tips For 12-Bit AD Converter Application PDFGeoFurriel100% (1)
- Continuous Wavelet Transform MATLAB & SimulinkDokumen30 halamanContinuous Wavelet Transform MATLAB & SimulinkthietdaucongBelum ada peringkat
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- AVR ATMega16Dokumen357 halamanAVR ATMega16orocimaruBelum ada peringkat
- Full Digitally Controlled Power Supply DesignDokumen61 halamanFull Digitally Controlled Power Supply DesignthietdaucongBelum ada peringkat
- Interrupción UART - AVRDokumen9 halamanInterrupción UART - AVRMichael VargasBelum ada peringkat
- Atmel 0856 AVR Instruction Set Manual PDFDokumen191 halamanAtmel 0856 AVR Instruction Set Manual PDFWsad WsadBelum ada peringkat
- Embedded Control Handbook Update 2000Dokumen848 halamanEmbedded Control Handbook Update 2000thietdaucongBelum ada peringkat
- Analog Applications Journal TI Slyt486Dokumen38 halamanAnalog Applications Journal TI Slyt486thietdaucongBelum ada peringkat
- Using AVR-GDB and AVaRICE Together Using The JTAG ICE Without AVR Studio, Colin O'FlynnDokumen31 halamanUsing AVR-GDB and AVaRICE Together Using The JTAG ICE Without AVR Studio, Colin O'FlynnthietdaucongBelum ada peringkat
- MCP 3204Dokumen40 halamanMCP 3204RismawanBelum ada peringkat
- Atmel 2521 Avr Hardware Design Considerations Applicationnote Avr042Dokumen21 halamanAtmel 2521 Avr Hardware Design Considerations Applicationnote Avr042mmonge1964Belum ada peringkat
- Analog Sensor Conditioning Circuits - An Overview AN990Dokumen16 halamanAnalog Sensor Conditioning Circuits - An Overview AN990thietdaucongBelum ada peringkat
- Analog Sensor Conditioning Circuits - An Overview AN990Dokumen16 halamanAnalog Sensor Conditioning Circuits - An Overview AN990thietdaucongBelum ada peringkat
- TI Analog HandbookDokumen101 halamanTI Analog HandbookJenory DenemyBelum ada peringkat
- Op Amp Filt PDFDokumen3 halamanOp Amp Filt PDFRhenne-Ann OrayanBelum ada peringkat
- Real Time ImplementationDokumen9 halamanReal Time ImplementationthietdaucongBelum ada peringkat
- Offline UPS Reference Design Using The dsPIC DSCDokumen86 halamanOffline UPS Reference Design Using The dsPIC DSCthietdaucongBelum ada peringkat
- TI - Texas Instruments - Slyy041c - Programmable Logic Control (PLC) Solutions GuideDokumen20 halamanTI - Texas Instruments - Slyy041c - Programmable Logic Control (PLC) Solutions GuideAnonymous R0s4q9X8Belum ada peringkat
- A Software Modularity Strategy For Digital Control SystemsDokumen41 halamanA Software Modularity Strategy For Digital Control SystemsthietdaucongBelum ada peringkat
- How To Read Component DatasheetsDokumen8 halamanHow To Read Component DatasheetstekellamerZ aka tekellamerBelum ada peringkat
- Motor Drive and Control SolutionsDokumen49 halamanMotor Drive and Control SolutionsthietdaucongBelum ada peringkat
- Developer Reading ListDokumen11 halamanDeveloper Reading Listravi4u_friendsBelum ada peringkat
- A Glossary of Analog-To-Digital Specifications and Performance CharecteristicsDokumen33 halamanA Glossary of Analog-To-Digital Specifications and Performance Charecteristicstrash54Belum ada peringkat
- Avr MT 128Dokumen15 halamanAvr MT 128Lucy TranBelum ada peringkat
- Wavelet Tutorial: Fundamental Concepts and Overview of Wavelet TheoryDokumen67 halamanWavelet Tutorial: Fundamental Concepts and Overview of Wavelet TheorydhrghamBelum ada peringkat
- Workhorse Technical ManualDokumen215 halamanWorkhorse Technical ManualthietdaucongBelum ada peringkat
- Curve Fitting ToolboxDokumen747 halamanCurve Fitting Toolboxthietdaucong100% (1)
- USB Interfacing and Real Time Data Plotting With MATLABDokumen9 halamanUSB Interfacing and Real Time Data Plotting With MATLABthietdaucongBelum ada peringkat
- Afe 4490Dokumen68 halamanAfe 4490thietdaucongBelum ada peringkat
- Power Quality ProblemsDokumen2 halamanPower Quality ProblemsKT MENONBelum ada peringkat
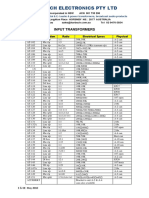
- Harbuch Electronics Pty LTD: Input TransformersDokumen4 halamanHarbuch Electronics Pty LTD: Input Transformersattapapa100% (1)
- Receiver: Service ManualDokumen76 halamanReceiver: Service ManualheladiomontesdeocaBelum ada peringkat
- HTSTP - List of Electrical Materials For ApprovalDokumen6 halamanHTSTP - List of Electrical Materials For ApprovaljaymarBelum ada peringkat
- Est Can BusDokumen32 halamanEst Can BusRuben EstradaBelum ada peringkat
- Injector Wiring - SpeeduinoDokumen3 halamanInjector Wiring - SpeeduinoCristián QuirozBelum ada peringkat
- TEK TDS340A 360 380 Service ManualDokumen152 halamanTEK TDS340A 360 380 Service ManualKlas JonssonBelum ada peringkat
- Handbook For Solar PV Systems PDFDokumen64 halamanHandbook For Solar PV Systems PDFyassine633Belum ada peringkat
- SFRA Testing On Two Winding TransformerDokumen4 halamanSFRA Testing On Two Winding TransformerNithya GowdaBelum ada peringkat
- PQ&FACTS - Unit 1Dokumen17 halamanPQ&FACTS - Unit 1kiranBelum ada peringkat
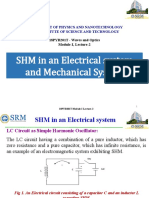
- SHM in An Electrical System and Mechanical SystemDokumen12 halamanSHM in An Electrical System and Mechanical Systemvenkateswaran k.sBelum ada peringkat
- Generator DDDokumen2 halamanGenerator DDalfredokpuBelum ada peringkat
- AC Smart Energy Meter SpecificationDokumen64 halamanAC Smart Energy Meter Specificationreaper mochiBelum ada peringkat
- Datasheet D296 Data Sheet EnUS 2702469259Dokumen3 halamanDatasheet D296 Data Sheet EnUS 2702469259Francisco Javier Vargas VargasBelum ada peringkat
- Grade 10 Physical Science - Electric CircuitsDokumen17 halamanGrade 10 Physical Science - Electric Circuitskanimoletsane3Belum ada peringkat
- Sb70491atosh9 PDFDokumen1 halamanSb70491atosh9 PDFCarlosBelum ada peringkat
- Installn SS9-2 (1.12) en GB INTDokumen56 halamanInstalln SS9-2 (1.12) en GB INTAurelien ValadeBelum ada peringkat
- PAC E100 110 Technical SpecV2 00 (060320)Dokumen24 halamanPAC E100 110 Technical SpecV2 00 (060320)mkarimiloloBelum ada peringkat
- PWM Sine Wave GenerationDokumen3 halamanPWM Sine Wave GenerationChidanand HebbaleBelum ada peringkat
- 6.Single-Sideband Communications SystemsDokumen22 halaman6.Single-Sideband Communications SystemsEjazullahkhan EjazBelum ada peringkat
- CONSOLA MOTOR Stryker CROSSFIREDokumen48 halamanCONSOLA MOTOR Stryker CROSSFIREJose M SBelum ada peringkat
- EEEB 123 Test 1 Sem 1 2016 2017Dokumen3 halamanEEEB 123 Test 1 Sem 1 2016 2017Puyuuu uuuBelum ada peringkat
- Tank Gauge Servicemanual Ed2 308012enDokumen154 halamanTank Gauge Servicemanual Ed2 308012enRam KumarBelum ada peringkat
- Spectralert® Advance™: Selectable-Output Low Frequency Sounders & Sounder StrobesDokumen4 halamanSpectralert® Advance™: Selectable-Output Low Frequency Sounders & Sounder StrobesTanesan WyotBelum ada peringkat
- Panasonic SA-AK960 Mini ComboDokumen121 halamanPanasonic SA-AK960 Mini Comboppstone100% (3)
- Catalogo INGESCO ENGDokumen32 halamanCatalogo INGESCO ENGBogdan MondocBelum ada peringkat
- Line Post HubbellDokumen16 halamanLine Post Hubbellsatsugai69Belum ada peringkat
- DUO 2X TypeDokumen1 halamanDUO 2X TypeHarshad PatilBelum ada peringkat
- Physics Project PDFDokumen10 halamanPhysics Project PDFrajaryan202106Belum ada peringkat