Informe Avance Def
Diunggah oleh
benajaddJudul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Informe Avance Def
Diunggah oleh
benajaddHak Cipta:
Format Tersedia
RESUMEN EJECUTIVO
Ttulo del Proyecto de Grado: Diseo E Implementacin Del Sistema De Comunicaciones Para El Control De Plantas De Manera Remota A Travs De Internet Autor: Andrs David Benavides Vega Asesor: Mauricio Duque Escobar
En el entorno educativo actual se observa una tendencia clara en el aprovechamiento de las tecnologas de la informacin para la enseanza y profundizacin en distintas reas del conocimiento; en el caso de la ingeniera y especficamente en el rea de la teora del control se han identificado distintas problemticas que se desean eliminar al introducir en los currculos universitarios las ventajas de las TI. Estas dificultades esencialmente son: el coste de las plantas y dispositivos utilizados para ilustrar las dinmicas fsicas y aplicar los conceptos de control; en el aprendizaje distribuido es importante permitir el acceso a los recursos de laboratorio a las personas que tienen dificultad o estn imposibilitadas para atender fsicamente a las prcticas con los dispositivos reales; y en el caso de uso de simulaciones con modelos matemticos se observa que no es suficiente acercarse a la realidad, sino que es necesario para el inters de los estudiantes observar el proceso fsico y poder interactuar con el mismo. Atendiendo al anterior planteamiento se escoge como opcin de solucin el desarrollo e implementacin de una planta y el sistema de control bajo un entorno web Java en donde se le permita al usuario remoto acceder, visualizar y controlar el dispositivo permitindole realizar una caracterizacin del proceso fsico para la identificacin de las variables del sistema y luego disear entre varias estrategias un control para observar el desempeo de la planta, siempre permitiendo una comunicacin constante entre el usuario y el proceso fsico. La planta escogida fue la conocida como Ball in a Tube que describe un proceso sencillo en donde se desea controlar la altura de una pelota de ping-pong confinada dentro de un tubo aumentando o disminuyendo la velocidad de un ventilador que crea un flujo de aire en el sistema; la dinmica fsica que describe este proceso tiene en cuenta varias no linealidades que hace el diseo de un controlador complicado y provee de cantidad distinta de retos al usuario, en especial las simplificaciones del modelo a utilizar en la representacin para el control de la planta.
El objetivo general, como fue ya mencionado, para alcanzar con el desarrollo de este proyecto es el de desarrollo e implementacin del sistema de control de una planta para su operacin remota, permitiendo el acceso y control a un usuario a travs de internet. Los objetivos especficos que se tienen son (1) el desarrollo de la aplicacin prototipo con capacidades de control de acceso, asignacin de recursos, transmisin y visualizacin de datos entre usuario y planta, manejo de contingencias, (2) la implementacin de varias estrategias de control para la planta (PID, Variables de Estado, Lgica Difusa), (3) el desarrollo del mdulo virtual de planta, en donde se encuentre su caracterizacin y elementos de control, (4) la elaboracin de la documentacin para el uso de la herramienta software, as como para una eventual adicin de mdulos al sistema y finalmente (5) la elaboracin del banco de pruebas para el sistema completo de comunicaciones y control. El estado actual del presente proyecto de grado se encuentra en la etapa de desarrollo del banco de pruebas del prototipo y la implementacin del sistema de control remoto para el manejo de la planta a travs de la herramienta web. En cuanto a los objetivos finales del proyecto se tiene que llevan un poco avance debido a la fase del proyecto actual: el primer objetivo se encuentra en un 60%, puesto que se tiene ya los diagramas de funcionamiento de la aplicacin remota y local (la que tiene acceso directo a la planta), as como tambin se encuentra en realizacin una primera prueba piloto para mostrar el acceso remoto de la planta (realizacin de una caracterizacin sencilla en dos puntos de operacin); para los objetivos (2) y (3) se tiene un porcentaje alcanzado de 50%, puesto que se tiene la documentacin necesaria para implementar los controladores PID y Fuzzy PID, y falta la toma de datos completa para poder disear cada uno y desarrollar el mdulo virtual para su disposicin en la aplicacin. Los ltimos dos objetivos son los que menos avanzados se encuentran debido a que dependen del trabajo realizado en los anteriores, su estado est en 10%. Se debe comentar en este punto que como inconveniente se present que se debi realizar el diseo y construccin de la planta, puesto que se presentaron dificultades para acceder a la que se desarroll en el departamento.
DISEO E IMPLEMENTACIN DEL SISTEMA DE COMUNICACIONES PARA EL CONTROL DE PLANTAS DE MANERA REMOTA A TRAVS DE INTERNET
ANDRES DAVID BENAVIDES VEGA
INFORME DE AVANCE DE PROYECTO DE GRADO
ASESOR: MAUICIO DUQUE ESCOBAR
BOGOT UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERA DEPARTAMENTO DE INGENIERIA ELCTRICA Y ELECTRNICA 2011
CONTENIDO
INTRODUCCIN 1. MARCO TERICO 2. OBJETIVOS 2.1 GENERAL 2.2 ESPECFICOS 3. METODOLOGA (DESARROLLO) 4. RESULTADOS 5. CONCLUSIONES
REFERENCIAS
INTRODUCCIN
Durante los ltimos aos se ha venido presentando una tendencia en el desarrollo de elementos para la enseanza de la teora de control que aprovechen el estado actual de las tecnologas de la informacin, en especial la ubicuidad y confiabilidad de la Internet, permitiendo as la implementacin de entornos web en donde se de acceso a recursos de hardware de manera remota en lo que se conoce como Laboratorios Virtuales. Por otra parte se reconoce que los equipos utilizados para la ejecucin de prcticas de laboratorio pueden ser costosos [4] y con ellos slo se pueden realizar ciertos tipos de anlisis debido a la limitante de dinmicas fsicas que son aptos para representar, por lo que es necesaria la consecucin de varias plantas para abarcar en un curso distintas estrategias de control, algo que muchas veces no es realizar.
Lo que se busca con el presente proyecto de manera general es disear e implementar el sistema de control remoto de una planta a travs de internet utilizando la arquitectura de la plataforma de desarrollo Java EJS (Easy Java Simulation) 1 [19]. De esta forma, se espera como resultado en la primera parte la construccin de la planta, la cual debe poseer acceso a sus controles para su operacin, con facilidad de conexin al computador a travs de la tarjeta de adquisicin de datos de NI. En la siguiente etapa, se tiene el computador y el control implementado en el software Labview, siendo en este caso el primer acceso de tipo local a la planta; de igual manera, se tiene que por medio de una conexin de internet, la estacin de trabajo se conecte a una aplicacin web de acceso, donde se unifican las plantas disponibles. All mismo se provee de acceso a los usuarios remotos y se muestran los servicios disponibles para los mismos, controlndose las comunicaciones y los problemas que en estas surjan.
Algunos experimentos que pueden plantearse para el empleo en un entorno remoto son sistemas de levitacin magntica, planta para el control de temperatura, sistema de plano inclinado, entre otros [4]. Se opt para el desarrollo del proyecto por la construccin de la planta Ball in Tube (Figura 1) debido a que permite la implementacin de varios tipos de controladores, tanto tradicionales como no tradicionales, siendo en su concepcin un experimento sencillo basado en el control de la velocidad de un ventilador que fuerza la entrada de aire hacia el tubo para mover la bola dentro y as establecer su altura en algn punto deseado.
Para ms informacin acerca de la aplicacin: http://www.um.es/fem/EjsWiki/index.php/Main/WhatIsEJS?
Fig. 1 Render de la planta Ball in a Tube.
1. MARCO TERICO
1.1. MODELOS ESTATICOS Y DINAMICOS DEL SISTEMA [1] Para la caracterizacin del sistema es necesario hacer en un modelo esttico (la curva caracterstica que informacin acerca del comportamiento de estado proceso.) como dinmico (se busca determinar comportamiento de los transientes del proceso). una representacin de la planta tanto representa este modelo contiene la estable de la salida y entrada del la respuesta en frecuencia y el
Haciendo uso de la seal escaln para encontrar la respuesta de sistemas de primer y segundo orden, se obtienen los siguientes resultados:
1.1.1. Primer Orden: empleando la representacin de tres parmetros del modelo se determinan las siguientes relaciones: () =
1+
; () = (1
()
; =
(1)
Fig. 2. Representacin grfica de la respuesta del sistema de primer orden al escaln. [1]
1.1.2. Segundo Orden: utilizando de igual manera para este caso tres parmetros en la representacin del modelo, se obtiene que: () =
2 +2+2 2
; =
2 1+ 2
; =
1 2
(2)
Fig. 3. Representacin grfica de la respuesta del sistema de segundo orden al escaln. [1]
1.2. CONTROLADORES
Se encuentran en la actualidad gran variedad de controladores para implementar en las distintas clases de procesos, algunos de ellos, como el PID, han sido utilizados por muchos aos y en gran variedad de ambientes, pero de igual manera entran a la rueda otros tipos de controladores que buscan mejorar el desempeo de los sistemas y aprovechar la capacidad actual de los sistemas computacionales.
1.2.1. PID [12]: es un controlador compuesto por tres tipos de funciones, la proporcional que esencialmente aumenta la velocidad de respuesta y la precisin del control del sistema, pero presenta un offset para todos los procesos; la accin integral se emplea en la eliminacin del error de estado estable del sistema, presentando como desventaja una respuesta oscilatoria mayor al aumentar el valor de la constante ; y el controlador derivativo que ayuda a la mejora la respuesta dinmica del sistema, participando en la estabilizacin del sistema, pero debido a su caracterstica puede amplificar las seales de ruido que se propagan en el proceso. La forma en que se encuentra comnmente este tipo de controlador es en accionamiento paralelo como en la Figura 5:
Fig. 4. Representacin en diagramas de bloques del controlador PID Paralelo.
Siendo la funcin que lo describe:
(3) Para la caracterizacin de las constantes del sistema se pueden utilizar varios mtodos de sintonizacin, entre los cuales se encuentran los de ZieglerNichols, Chien-Hrones-Reswick (CHR), Cohen-Coon, Internal Model Control (IMC), etc. 1.2.2. PID con Lgica Difusa [13]: en este tipo de controladores se tiene de manera general que los parmetros del PID se tratan como variables difusas y de esta forma el controlador es implementado y sintonizado. Para esto se toman las entradas del proceso y se ubican segn unas reglas lingsticas definidas con anterioridad, con esto se evalan con operaciones de lgica difusa y se encuentra una respuesta, la cual se convierte de nuevo en variables que pueden ser dadas y aplicadas por el actuador del sistema. 1.2.3. Realimentacin de Estados: utilizando la representacin de estados del sistema y teniendo que todos pueden ser medidos se puede encontrar una representacin del controlador como
(11) En donde es la ganancia y es la referencia a seguir; con este mtodo se quiere ubicar los polos del sistema a una ubicacin deseada, utilizando toda la informacin que el sistema provea y el empleo de elementos proporcionales.
1.3. MODELO DESCRIPTIVO DE LA PLANTA BALL IN A TUBE Una representacin del modelo fsico del comportamiento de la pelota dentro del cilindro se puede encontrar analizando cmo son las fuerzas que se aplican en la pelota al ejercerse un flujo de aire:
Fig. 5. Diagrama de fuerzas actuando en la bola.
Donde representa las fuerzas de arrastre debidas a la resistencia del aire, las fuerzas por los gradientes de presin, y la fuerza de gravedad en la bola. Luego la fuerza neta se describe en la siguiente ecuacin:
3 = + = 3 2 2
(12)
2 2 3
3
Teniendo en cuenta que es la velocidad de flujo de aire, es la densidad del aire, el radio de la bola, el coeficiente de arrastre, es la distancia vertical entre la bola y el ventilador, la densidad de la bola, y la constante gravitacional. Un desarrollo completo de la dinmica del sistema se encuentra en [8], [4] y una simplificacin para la aplicacin de controladores lineales se hace en [14].
2. OBJETIVOS
2.1. OBJETIVO GENERAL
El objetivo del proyecto es el desarrollo e implementacin del sistema de control de una planta para su operacin remota, permitiendo el acceso y control a un usuario a travs de internet.
2.2. OBJETIVOS ESPECFICOS
- Desarrollo de la aplicacin prototipo con capacidades de control de acceso, asignacin de recursos, transmisin y visualizacin de datos entre usuario y planta, manejo de contingencias. - Implementacin de varias estrategias de control para la planta (PID, Variables de Estado, Lgica Difusa). - Desarrollo del mdulo virtual de planta, en donde se encuentre su caracterizacin y elementos de control. - Elaboracin de la documentacin para el uso de la herramienta software, as como para una eventual adicin de mdulos al sistema. - Elaboracin del banco de pruebas para el sistema completo de comunicaciones y control.
3. METODOLOGA (DESARROLLO)
Para el desarrollo del proyecto se sigue una metodologa de trabajo desde el punto de vista del diseo: 3.1. DEFINICIN DEL PROBLEMA Se tiene un primer problema con el acceso a recursos de laboratorio que debido a su coste, dificultad de consecucin y el mantenimiento necesario no es posible tenerlos y facilitar su uso a estudiantes y profesores para la enseanza de la teora de control [11]; por otra parte se reconoce que en un ambiente pedaggico se debe proveer a los estudiantes el conocimiento sobre el funcionamiento en la vida real de los modelos tericos estudiados y se encuentra que establecer entornos simulados en donde se estudien por medio de representaciones matemticas y fsicas los sistemas de control de procesos reales no son muy atractivos [5]; y finalmente, con el aumento del modelo de enseanza a larga distancia (aprendizaje distribuido) es clara la necesidad de acercar a los estudiantes que se les imposibilite un acceso presencial a los laboratorios fsicos, a la experiencia que estos suministran [16]. Se encuentra entonces que una forma de resolver este problema es el diseo de plantas de bajo costo en su construccin que se asemejen a procesos de control reales y permitir su acceso para usuarios remotos a travs de la Internet, aprovechando el soporte actual para la implementacin de una aplicacin web de acceso remoto a la planta, adems de la posibilidad de hacer uso de la aplicacin Labview para el desarrollo del control (cuya vinculacin con la plataforma ya desarrollada se realiza de manera sencilla). 3.2. REQUERIMIENTOS Se plantean dos clases de requerimientos generales, los establecidos para el sistema de control remoto y los especficos de la planta. 3.2.1. Requerimientos de la planta:
Fig. 6. rbol de objetivos de la planta.
3.2.2. Requerimientos del sistema de control remoto:
Sistema Remoto
Visualizacin
Datos
Interaccin Usuario
Interaccin Planta
Del Proceso real (planta)
Grabado archivo
Configuracin de la corrida del sistema
Recoleccin datos de sensor
De la medicin de las variables
Carga archivo
Eleccin de los parmetros de control
Envo de seales de control para actuador
De la gua de laboratorio
Manejo de Contingencias
Fig. 7. rbol de objetivos del sistema remoto.
3.3. RECOLECCIN DE INFORMACIN El problema planteado en el presente proyecto de grado ha sido tratado desde dos aspectos principales: El surgimiento de entornos virtuales para la enseanza de la teora de control [3] [5] [6] [7] [9] [10] y el empleo de diferentes estrategias de control para la planta aqu empleada (Ball-in-a-Tube) [4] [15] [18]. 3.4. DIAGRAMA DE BLOQUES 3.4.1. Sistema de control remoto:
Fig. 8. Diagrama general del sistema de control remoto.
3.4.2. Planta:
Fig. 9. Diagrama general de la planta.
3.5. DIAGRAMA DE FUNCIONES 3.5.1. Planta:
3.5.2. Sistema de control remoto:
3.6. SINTESIS DE CONFIGURACION
En primera instancia se procede a la especificacin de la planta, la cual se basa en el diseo implementado que se ilustra en [4]. La planta bsicamente cuenta con un mdulo en el cual se ubica en su su base y en la parte superior poseen accesos de aire en cada costado pudiendo ser obstaculizados segn sea la conveniencia para el experimento planteado, dejando entonces una nica entrada de aire (en la parte inferior) y una nica salida de aire (en la parte superior). Este posee un ventilador que fuerza la entrada de aire hacia el tubo para mover la bola dentro; se tiene adems un sensor de ultrasonido para determinar la posicin (altura) de la bola en cada momento. Se pueden disponer de mdulos similares conectados a travs de dos colectores de admisin y de escape, compartindose siempre de esta forma el aire en el sistema. El diseo fsico de la planta qued de la siguiente forma:
Fig. 11. Dimensiones Caja superior e inferior.
Fig. 12. Dimensiones Caja Presurizacin y Tubo.
Fig. 13. Perfil de la Planta.
En la especificacin del sistema de comunicaciones y control remoto se tiene que la labor es el desarrollo de la interfaz del cliente, que esencialmente es una aplicacin Java desarrollada en la herramienta EJS que junto a un plugin permite el acceso de manera remota a un archivo de Labview y cargar de manera transparente para el usuario el cdigo que controla la planta. Se muestra a continuacin un esquema de la visualizacin que de manera remota permita al usuario la interaccin con la planta en una sola ventana (aunque se podra implementar una representacin en varias ventanas) a construir basado en [2]:
Fig. 14. Interfaz de visualizacin del laboratorio remoto.
Descripcin General del procedimiento que se est realizando (1). Representacin Grfica de la planta para observar su topologa y la posicin de las bolas en cada momento (2). Variables de control de la planta y Variables fsicas medidas (3). Cmara de visualizacin remota (4).
4. RESULTADOS
4.1. PLANTA Para el desarrollo del proyecto se construy la planta Ball in a Tube segn los establecido en el punto anterior. En la figura 15 se muestra la estructura fsica con los elementos que la componen:
Fig. 15. Imagen de la planta construida.
Estructura Fsica en acrlico, separable en dos partes (Estructura Inferior y Superior en la figura 15). Ventilador DC: similar a los que se encuentran dentro de las PCs, sus caractersticas elctricas son operacin a 12V (aunque se puede alimentar con menos y funciona correctamente para los propsitos del presente experimento) y una corriente de 0.5A; para su control se emplea una seal de PWM con ciclo til variable segn se quiera la velocidad del motor.
Sensor Ultrasnico SRF05: construido por Devantech Ltd con especificaciones de Rango 1cm a 4m, Voltaje 5v, Corriente 4mA, Frecuencia 40KHz y un tamao de 43mm x 20mm x 17mm.
Fig. 16. Imagen del Sensor SRF05. Obtenida de http://www.msebilbao.com/notas/downloads/Medidor%20Ultrasonico%20SRF05.pdf
Conectores: para la conexin de las entradas y salidas de la planta se pueden emplear dos modos: conexin directa con el computador por medio de bus Serial o USB y el empleo de la tarjeta de adquisicin de NI 9205 y NI9263.
4.2. APLICACION LABVIEW Para la aplicacin de control local de la planta en versin de prueba se desarroll un entorno en donde se accediera a las de entrada (Pulso de inicio medicin) y salida del sensor (Pulso de Medida - Eco), as como tambin la seal PWM para el motor (que se enva al driver de potencia L293B) 4.3. APLICACIN JAVA En la aplicacin para la prueba en servidor local se utiliz nicamente como visualizacin el valor actual de la altura de la bola. Se tiene la determinacin de una curva sencilla a partir de los datos recogidos en dos puntos de operacin determinados por el usuario.
5. CONCLUSIONES
En el desarrollo actual del proyecto se ha podido alcanzar el desarrollo y montaje de una versin prototipo de la planta Ball in a Tube, junto con una aplicacin sencilla para observar el funcionamiento correcto de la misma. Se espera continuar con el avance para la implementacin de los controladores de esta y la puesta en funcionamiento de la aplicacin web correspondiente.
REFERENCIAS
[1]Astrom, K., & Hagglund, T. (1995). PID Controllers: Theory, Design and Tuning. [2] Barrios, A, & Panche S.; Tutorial I: Building the java applet with Easy Java Simulation. Julio 2011. [3]Bochicchio, M.A.; Longo, A.; "Hands-On Remote Labs: Collaborative Web Laboratories as a Case Study for IT Engineering Classes," Learning Technologies, IEEE Transactions on, vol.2, no.4, pp.320-330, Oct.-Dec. 2009. doi: 10.1109/TLT.2009.30. URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=5204073&isnumber=5370793 [4]Caro, C., & Quijano, N. (2011). Low Cost Experiment for Control Systems. [5]Casini, M.; Prattichizzo, D.; Vicino, A.; , "The automatic control telelab," Control Systems, IEEE , vol.24, no.3, pp. 36- 44, Jun 2004. doi: 10.1109/MCS.2004.1299531.URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1299531&isnumber=28872 [6]Casini, M.; Prattichizzo, D.; Vicino, A.; , "The automatic control telelab: a user-friendly interface for distance learning," Education, IEEE Transactions on , vol.46, no.2, pp. 252257, May 2003.doi: 10.1109/TE.2002.808224.URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=1198634&isnumber=26978 [7]Dormido, S., Vargas, H., Snchez, J., Dormido, R., Duro, N., Dormido-Canto, S., y otros. (2008). Developing and Implementing Virtual and Remote Labs for Control Education: The UNED pilot experience. 17th IFAC World Congress (IFAC'08), (pg. 6). Seul. [8]Escao, J.M.; Ortega, M.G.; Rubio, F.R.; , "Position control of a pneumatic levitation system," Emerging Technologies and Factory Automation, 2005. ETFA 2005. 10th IEEE Conference on , vol.1, no., pp.6 pp.-528, 19-22 Sept. 2005. doi:10.1109/ETFA.2005.1612568.URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arn umber=1612568&isnumber=33857 [9]Fernndez-Samac, L., Scarpetta, J. M., & Orozco-Gutirrez, M. L. (2010). Emulation and remote experimentation as support resources in a PBL approach for control systems. Rev. Fac. Ing. Univ. Antioquia , 194-202. [10]Lazar, C.; Carari, S.; , "A Remote-Control Engineering Laboratory," Industrial Electronics, IEEE Transactions on , vol.55, no.6, pp.2368-2375, June 2008. doi: 10.1109/TIE.2008.920650.URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber= 4470595&isnumber=4531695
[11]Macias, M.E.; Mendez, I.; , "TeleLab - remote automations lab in real time," Frontiers in Education Conference, 2008. FIE 2008. 38th Annual , vol., no., pp.S1B-15-S1B-20, 2225 Oct. 2008. doi: 10.1109/FIE.2008.4720444. URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=4720444&isnumber=4720249 [12]Mansour, T. (2011). PID Control Implementation and Tuning. Rijeka: InTech. [13]Ogata, K. (2002). Modern Control Engineering. New Jersey: Prentice Hall. [14]Pavlic, T. P. (2007). Ball-in-Tube Linearization Example, Lab 5: Nonlinear Control for a Flexible Joint. Obtenido de http://www2.ece.ohiostate.edu/~passino/lab5_nonlinear_ball_tube_ex.pdf [15]Pereira, J.S.; Bowles, J.B.; , "Comparing controllers with the ball in a tube experiment," Fuzzy Systems, 1996., Proceedings of the Fifth IEEE International Conference on , vol.1, no., pp.504-510 vol.1, 8-11 Sep 1996. doi: 10.1109/FUZZY.1996.551792. URL: http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber=551792&isnumber=11965 [16]Sanchez, J.; Dormido, S.; Pastor, R.; Morilla, F.; , "A Java/Matlab-based environment for remote control system laboratories: illustrated with an inverted pendulum," Education, IEEE Transactions on , vol.47, no.3, pp. 321- 329, Aug. 2004. doi: 10.1109/TE.2004.825525.URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnumber= 1323144&isnumber=29295 [17]Quijano, N.; Gil, A.E.; Passino, K.M., "Experiments for dynamic resource allocation, scheduling, and control: new challenges from information technology-enabled feedback control," Control Systems, IEEE, vol.25, no.1, pp. 63- 79, Feb. 2005. doi:10.1109/MCS.2005.1388804.URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnu mber=1388804&isnumber=30230 [18]Ziwei, O.; Michael, S.; Wei Kexin; , "The experiment Ball-in-tube with Fuzzy-PID controller based on dspace," Systems, Man and Cybernetics, 2007. ISIC. IEEE International Conference on, vol., no., pp.877-881, 7-10 Oct. 2007. doi: 10.1109/ICSMC.2007.4413729.URL:http://ieeexplore.ieee.org/stamp/stamp.jsp?tp=&arnu mber=4413729&isnumber=4413561 [19] Barrios, A; Structural And Technical Design For The Network System Architecture
AUTODIAGNOSTICO
Analizando el desarrollo actual del proyecto de grado se ve que el dimensionamiento del problema y la solucin no se haban realizado correctamente, puesto que segn el cronograma para la fecha de entrega de este documento se debera contar con el sistema completo y funcionando para el mes de Septiembre, algo que claramente no se pudo cumplir. Se tiene que la principal razn para justificar este retraso fue la fecha de la eleccin de la planta a utilizar segn el cronograma deba realizarse una semana antes de empezar el mes de Agosto (inicio de clases fue el primero de ese mes), que luego llev a la dificultad para tener el acceso a la planta que en el departamento se ha desarrollado y que es utilizada por una estudiante de maestra para su tesis; esto conllev a que se debiera realizar el diseo y construccin de la planta en base a la existente, pero que retras el proyecto casi un mes. Se debe aclarar que en el punto en el que se encuentra el proyecto se va a avanzar ms rpidamente, puesto que con la puesta en marcha de la planta se va a permitir la prueba de los controladores y el desarrollo completo de la caracterizacin de esta, adems de mejorar las aplicaciones de control remoto del proceso.
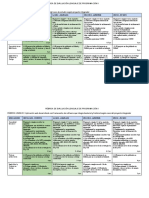
EVALUACIN Par conocer de manera directa la percepcin del asesor del proyecto, por favor pedirle que diligencia la siguiente matriz. Anexar (digitalizar) esta evaluacin y enviarla junto al informe solicitado. Por favor encerrar la opcin que mejor describa el tem a evaluar: Frecuenci a Eventual Mnimo Nulo adecuada Muy Excelente. Bueno. Estudiante Se La apreciacin general autnomo, esperan sobre el desarrollo del ordenado, con Bueno Regular Malo resultado proyecto es altas s probabilidades completo de xito s. Respecto al informe de Es bueno Incompleto. avances presentado pero no Falta un refleja Es completo y mejor completa claro. Acorde esfuerzo en mente el Pobre Malo al trabajo la verdader desarrollado. realizacin o avance de del linforme. proyecto Observaciones: Es urgente acelerar el paso. EL haber tenido que disear y montar la planta es una actividad que no se haba contemplado. Dadas las implicaciones de montaje y las contingencias que esto siempre trae, es necesario replantear al cronograma, que de paso no se presenta en el informe. Continuo El seguimiento al desarrollo del proyecto ha sido
Nombre del estudiante asesorado: Andrs David Benavides Vega Ttulo del proyecto: Diseo E Implementacin Del Sistema De Comunicaciones Para El
Control De Plantas De Manera Remota A Travs De Internet
Asesor: Mauricio Duque Escobar Firma: Fecha: 2011.10.03
Anda mungkin juga menyukai
- Exposicion MongoDokumen36 halamanExposicion MongoPedrito FernandezBelum ada peringkat
- Taller Pratico Cvlac y Gruplac-ExtensionDokumen3 halamanTaller Pratico Cvlac y Gruplac-ExtensionBradys D. Monterroza GarciaBelum ada peringkat
- Temas de Tecnologia 1 A 5Dokumen15 halamanTemas de Tecnologia 1 A 5Miguel JuarezBelum ada peringkat
- Solicitud de UsuarioDokumen3 halamanSolicitud de UsuarioJuan Sebastián Cordero ToralBelum ada peringkat
- Rubricas LP-II 2022 v2Dokumen3 halamanRubricas LP-II 2022 v2Angel Rosendo Condori CoaquiraBelum ada peringkat
- Commands of The Operating SystemDokumen3 halamanCommands of The Operating SystemDavid SotoBelum ada peringkat
- O-F-026 Levantamiento de Requerimientos de Software - Control de Cambios Al API Rest "Fepep" 2004202Dokumen4 halamanO-F-026 Levantamiento de Requerimientos de Software - Control de Cambios Al API Rest "Fepep" 2004202Camilo VasquezBelum ada peringkat
- Lenguaje de Programación (Java)Dokumen3 halamanLenguaje de Programación (Java)Jose Becerra100% (1)
- Formato Evaluación Proceso de Practica.Dokumen3 halamanFormato Evaluación Proceso de Practica.Escalante EscalanteBelum ada peringkat
- Lubricación y Mantenimiento Preventivo en Maquinas Industriales PROGRAMA PDFDokumen17 halamanLubricación y Mantenimiento Preventivo en Maquinas Industriales PROGRAMA PDFluis andres chacon marianiBelum ada peringkat
- Uso de Kahoot!Dokumen3 halamanUso de Kahoot!alethecatBelum ada peringkat
- Análisis Por Elementos Finitos en Empalmes de Correa Transportadora de Carcasa MetalicaDokumen13 halamanAnálisis Por Elementos Finitos en Empalmes de Correa Transportadora de Carcasa MetalicaCésarRenatoCopacondoriCuaylaBelum ada peringkat
- Plan EstadiaDokumen39 halamanPlan EstadiaCabrera Isc50% (2)
- Contrato Teletrabajo - COVID 19Dokumen3 halamanContrato Teletrabajo - COVID 19Karen Álvarez VargasBelum ada peringkat
- Aplicacin Android Servicio PHPDokumen27 halamanAplicacin Android Servicio PHPMarco LopezBelum ada peringkat
- Capítulo 1 Ejercicios ResueltosDokumen24 halamanCapítulo 1 Ejercicios ResueltosJulio Poma Torres50% (2)
- Curso de PHP (Programación Orientada A Objetos) - PhpyaDokumen59 halamanCurso de PHP (Programación Orientada A Objetos) - Phpyajoeluis_rivas82320% (1)
- Informe bimestral prácticas administración financieraDokumen55 halamanInforme bimestral prácticas administración financieraTayanaraBelum ada peringkat
- EJEMPLO Aplicaciones Del Pert y CPMDokumen13 halamanEJEMPLO Aplicaciones Del Pert y CPMRonald Torres PariBelum ada peringkat
- Guia 03 Filadelfo Ortiz ComputacionDokumen3 halamanGuia 03 Filadelfo Ortiz ComputacionFaustino NijBelum ada peringkat
- ¿Cómo Grabar Un Archivo ISO en Un Disco - AOMEI BackupperDokumen13 halaman¿Cómo Grabar Un Archivo ISO en Un Disco - AOMEI BackupperAnonymous 8u1eidtBelum ada peringkat
- Trabajo de Sistema OperativoDokumen20 halamanTrabajo de Sistema Operativoaxel vladimir mayorgaBelum ada peringkat
- Fundamentos de La Web - URJCDokumen19 halamanFundamentos de La Web - URJCGabriel RubioBelum ada peringkat
- Copia de BOT PTC Guia y Paginas Actualizado 20/03/19Dokumen17 halamanCopia de BOT PTC Guia y Paginas Actualizado 20/03/19Luis MussettBelum ada peringkat
- Adela Taller 2 MitadDokumen9 halamanAdela Taller 2 MitadJersson DuvanBelum ada peringkat
- ELE Montaje y Mantenimiento de Instalaciones Eléctricas de Baja Tensión. ELEE0109Dokumen21 halamanELE Montaje y Mantenimiento de Instalaciones Eléctricas de Baja Tensión. ELEE0109Francisco Mx Ferriz JerezBelum ada peringkat
- Bep Grupo 5 V8 PDFDokumen29 halamanBep Grupo 5 V8 PDFCristopher EstrellaBelum ada peringkat
- Metodología en CascadaDokumen8 halamanMetodología en CascadaSaul GonzalezBelum ada peringkat
- Quiz 3 RoboticaDokumen10 halamanQuiz 3 RoboticaDavid AndresBelum ada peringkat
- IE Evidencia Mapa de Cajas Identificar Ataques Mas ComunesDokumen2 halamanIE Evidencia Mapa de Cajas Identificar Ataques Mas ComunesJOHN FREDY CARDENAS BETANCOURTHBelum ada peringkat