Fault Tolerant Control For Six-Phase PMSM Drive System Via Intelligent Complementary Sliding Mode Control Using TSKFNN-AMF
Diunggah oleh
RACHEL BOSSDeskripsi Asli:
Judul Asli
Hak Cipta
Format Tersedia
Bagikan dokumen Ini
Apakah menurut Anda dokumen ini bermanfaat?
Apakah konten ini tidak pantas?
Laporkan Dokumen IniHak Cipta:
Format Tersedia
Fault Tolerant Control For Six-Phase PMSM Drive System Via Intelligent Complementary Sliding Mode Control Using TSKFNN-AMF
Diunggah oleh
RACHEL BOSSHak Cipta:
Format Tersedia
Copyright (c) 2013 IEEE. Personal use is permitted.
For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
AbstractAn intelligent complementary sliding mode control
(ICSMC) is proposed in this study for the fault tolerant control of
a six-phase permanent magnet synchronous motor (PMSM) drive
system with open phases. First, the dynamics of the six-phase
PMSM drive system with a lumped uncertainty is described in
detail. Then, the fault detection and operating decision method are
briefly introduced. Moreover, a complementary sliding mode
control (CSMC) is designed to stabilize the fault tolerant control of
the six-phase PMSM drive system. Furthermore, to improve the
required control performance and to maintain the stability of the
six-phase PMSM drive system under faulty condition, the ICSMC
is developed. In this approach, a Takagi-Sugeno-Kang type fuzzy
neural network with asymmetric membership function
(TSKFNN-AMF) estimator with accurate approximation
capability is employed to estimate the lumped uncertainty. In
addition, the adaptive learning algorithms for the online training
of the TSKFNN-AMF are derived using the Lyapunov theorem to
guarantee the closed-loop stability. Additionally, to enhance the
control performance of the proposed intelligent fault tolerant
control, a 32-bit floating-point digital signal processor (DSP),
TMS320F28335, is adopted for the implementation of the
proposed fault tolerant control system. Finally, some experimental
results are illustrated to demonstrate the validity of the proposed
fault tolerant control for the six-phase PMSM drive system via
ICSMC.
Indexing TermsSix-phase permanent magnet synchronous
motor, fault tolerant control, complementary sliding mode control,
Takagi-Sugeno-Kang type fuzzy neural network, asymmetric
membership function
I. INTRODUCTION
T is well known that the major advantage of sliding mode
control (SMC) system is its insensitivity to parameter
Manuscript received July 16, 2012. Revised November 28, 2012. Accepted
for publication December 29, 2012. This work was supported by the National
Science Council, Taiwan, R. O. C. through its grant NSC 101-2221-
E-008-104-MY3.
Copyright
C
2012 IEEE. Personal use of this material is permitted. However,
permission to use this material for any other purposes must be obtained from the
IEEE by sending a request to pubs-permissions@ieee.org
F. J. Lin is with the Department of Electrical Engineering, National Central
University, Chungli 320, Taiwan (corresponding author to provide phone:
886-3-4227151 ext. 34532; fax: 886-3-4255830; e-mail: linfj@ee.ncu.edu.tw).
Y. C. Hung is with the Department of Electrical Engineering, National
Central University, Chungli 320, Taiwan (e-mail: 975401013@cc.ncu.edu.tw).
M. T. Tsai is with the Department of Electrical Engineering, National Central
University, Chungli 320, Taiwan (e-mail: montieddie@gmail.com).
variations and external force disturbance once the system
trajectory reaches and stays on the sliding surface [1]-[3]. The
robustness of the SMC is guaranteed usually by using the
strategy of a large switching control gain. This switching
strategy often leads to the chattering phenomenon which caused
by switching function in hitting control law [1], [2]. To improve
the chattering phenomena, a common method is to use the
saturation function to replace the switching function. Though
the chattering is reduced by this method, however, an indefinite
steady state error is also caused depending on the selection of
the boundary layer. Therefore, a trade-off problem between
chattering and control accuracy is arisen. Another method is to
diminish the gain of the switching function in the hitting control.
Nevertheless, if the restrained hitting control is not strong
enough to deal with the uncertainties, the robustness of the
SMC becomes poor. Hence, the complementary sliding mode
control (CSMC), which not only alleviates the chattering
phenomena but also possesses the control accuracy, has been
developed in [4], [5]. With this approach, the tracking error can
be guaranteed to reduce at least by 50% compared with the
SMC using the saturation function. Unfortunately, similar to
SMC, the bound of the uncertainty is necessary in the design of
CSMC and is very difficult to obtain in advance in practical
applications.
Intelligent control approaches such as fuzzy neural networks
(FNNs), which possess the merits of both fuzzy systems [6] and
neural network [7], do not require mathematical models and
have the ability to approximate nonlinear systems [8].
Therefore, many researchers represent complex plants and
construct advanced controllers using FNN approaches [9]-[17].
Generally, FNNs can be divided into two types: Mamdani type
and Takagi-Sugeno-Kang (TSK) type FNNs. Since the TSK
type FNN provides more powerful representation than the
Mamdani type FNN does, the TSK type FNN is one of most
used FNN schemes. Moreover, since the output of the TSK
model has an explicit analytical form, it is possible to
incorporate mathematical knowledge about the controlled plant
and its behavior can be analyzed using conventional control
theory. Furthermore, to simplify the design procedure of the
FNN, symmetric membership functions (MFs) (e.g. Gaussian or
triangular functions) are commonly adopted in practical
applications. However, to achieve the specified approximation
accuracy, a large number of rules should be applied [18]. On the
Fault Tolerant Control for Six-Phase PMSM Drive
System via Intelligent Complementary Sliding Mode
Control Using TSKFNN-AMF
Faa-Jeng Lin, Senior Member, IEEE, Ying-Chih Hung, Student Member, IEEE, and Meng-Ting Tsai
I
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
other hand, since the dimensions of the standard Gaussian or
triangular MF are directly extended in asymmetric membership
functions (AMFs), not only the learning capability of the
networks can be upgraded but also the number of fuzzy rules
can be optimized. Thus, AMFs have been adopted in several
approaches to optimize the number of fuzzy rules and improve
the control precisions [19], [20].
When the motor winding or respective inverter is broken, the
unbalanced current will cause torque fluctuation so that the
motor may be operated under non-smooth situation and lead to
a seriously damage. Thus, the fault tolerant control for motor
and inverter should be considered. In particular applications,
the control systems must have ability to detect fault and
maintain the stability and control performance [21]. The fault
may occur due to the sensor fault such as strain gauge sensor,
current sensor and voltage sensor fault [21], [22], or the broken
plant such as motor with open phases [23]-[26]. The sensor
fault may result in degraded control performance and unstable
control system. A fault tolerant detection method for the strain
gauge sensor fault was proposed in [21] where sensor signal
observers were adopted for one-link flexible arm robot to
maintain the stability and the control performance. In [22], a
fault tolerant control of induction motor drive for electrical
vehicle or hybrid electrical vehicle traction applications was
proposed to obtain smooth speed and torque transient responses
under sensor loss conditions. However, only simulated results
were provided in the above literature for the comparison of the
control performances of the conventional and the proposed fault
tolerant control under sensor loss and sensor recovery situations.
Moreover, a fault tolerant operation method were proposed in
[23] for a six-phase symmetrical induction motor. The proposed
method can reduce the pulsating torque and motor losses as well
as improve the drive performance. In [24], the models of a
six-phase induction machine in both healthy and faulty
conditions were proposed, and the fuzzy logic control and
sliding mode control have been adopted to obtain a high
accuracy positioning of the rotor. However, the faulty condition
of the motor winding must be detected off-line in the above two
literatures, which are not suitable for the faulty condition occurs
during the operating motor. Furthermore, the fault tolerant
control technique for five-phase permanent magnet motors with
trapezoidal back electromotive forces under various
open-circuit conditions has been proposed in [25], and the fault
tolerant control for six-phase permanent magnet bearingless
motors has been proposed in [26] respectively. In both the
literatures, the open phases have been detected online first and
then the current commands of the current control loop can be
obtained from the fault tolerant controller. On the other hand,
since the neural networks (NNs) have learning ability and can
approximate a wide range of nonlinear functions, the amount of
research for fault detection by using of various NNs has
increased in the past decade [27]-[32]. The NNs are adopted in
the fault detection to learn the dynamic models or estimate the
system states under healthy condition in advance. Then, the
fault can be detected according to the differences of the models
or states between healthy and faulty conditions.
Multiphase AC motors have some advantages such as reduce
the single static switches current stress, smooth the
electromagnetic torque pulsation, increase the efficiency,
decrease the total losses, reduce magnetic flux harmonic and
improve reliability [33], [34]. Moreover, the multiphase AC
motors can enhance the system performance and output power
via the multiphase inverter drive system technologies [34], [35].
The researches about six-phase PMSM can be found in [36],
[37]. In [36], the sensorless technology of six-phase PMSM was
proposed to estimate the rotor angel and phase current. In [37],
a finite-element method-based analysis of output power
capability improvement in a six-phase flux-weakened PMSM
with a third harmonic current injection has been proposed.
Furthermore, in the particular application of six-phase PMSM,
if one of the three-phase winding or the respective inverter is
broken, the power rating of the PMSM is reduced to half and
still can be operated safely using the remaining three-phase
winding and inverter, so that the operating safety of the system
can be increased.
The motivation of this study is to develop a DSP-based fault
tolerant control of a six-phase PMSM drive system with dual
three-phase windings and dual inverter via ICSMC. The
six-phase PMSM, where two three-phase windings are
designed to spatially shift 30 electrical degrees in order to
reduce the torque ripple, is adopted. Moreover, only the motor
with open phases is considered as the faulty condition in this
study. In this study, first, the dynamics of the six-phase PMSM
drive system with a lumped uncertainty, fault detection and
operating decision method are introduced. Though the
redundant topologies of the motor windings and power
electronics havent been considered in this study, the proposed
fault detection and operating decision method is a kind of fault
tolerant control for the six-phase PMSM drive system [25], [26].
Next, a CSMC is designed to stabilize the fault tolerant control
of the six-phase PMSM drive system. Then, to improve the
control performance for the transient tracking response under
faulty condition, the ICSMC is developed. In this approach, the
TSKFNN-AMF estimator is proposed to estimate the unknown
lumped uncertainty including parameter variations, external
disturbances and nonlinear friction force online. Furthermore,
adaptive learning algorithms for the online training of
TSKFNN-AMF are derived using the Lyapunov theorem. In
addition, the proposed fault tolerant control system is
implemented in a 32-bit floating-point DSP, TMS320F28335,
and the effectiveness of the proposed fault tolerant control
system via ICSMC is verified by experimentation.
II. SYSTEM MODELING AND FAULT TOLERANT CONTROL
A. Modeling of Six-Phase PMSM Drive System
In this study, a six-phase PMSM with two three-phase
windings is adopted where abc winding is spatially 30
electrical degrees phase led to xyz winding. The phase voltage
and flux linkage equations in the stationary reference frame for
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
abc winding and xyz winding of six-phase PMSM are shown
as [24]:
abc abc s abc
dt
d
i R v + =
~
(1)
mabc xyz abc abc
i L i L ' + + =
12 11
~ ~
(2)
xyz xyz s xyz
dt
d
i R v + =
~
(3)
mxyz abc xyz xyz
i L i L ' + + =
21 22
~ ~
(4)
where | |
T
s s s s
R R R diag = R
~
is the stator resistance vector;
| |
T
c b a abc
v v v = v is the phase voltage vector of abc
winding; | |
T
c b a abc
i i i = i is the current vector of abc
winding; | |
T
z y x xyz
v v v = v is the phase voltage vector of
xyz winding; | |
T
z y x xyz
i i i = i is the current vector of xyz
winding; | |
T
c b a abc
= is the stator flux linkage vector
of abc winding; | |
T
z y x xyz
= is the stator flux
linkage vector of xyz winding;
11
~
L is the stator inductance
vector of abc winding;
22
~
L is the stator inductance vector of
xyz winding;
12
~
L and
21
~
L are the mutual inductance vectors;
mabc
' is the permanent-magnet flux linkage vector of abc
winding;
mxyz
' is the permanent-magnet flux linkage vector of
xyz winding.
In order to control the six-phase PMSM, the following
transformation matrixes have been used to transfer the above
equations into the synchronous rotating reference frame:
(
(
(
(
(
+
+
=
2
1
2
1
2
1
) 120 sin( ) 120 sin( sin
) 120 cos( ) 120 cos( cos
3
2
1
e e e
e e e
qd
u u u
u u u
T (5)
(
(
(
(
(
+
+
=
2
1
2
1
2
1
) 90 sin( ) 150 sin( ) 30 sin(
) 90 cos( ) 150 cos( ) 30 cos(
3
2
2
e e e
e e e
qd
u u u
u u u
T (6)
where
1 qd
T is the transformation matrix for abc winding;
2 qd
T
is the transformation matrix for xyz winding;
e
u is the rotor
flux angle. Moreover, the machine model of a six-phase PMSM
can be described in synchronous rotating reference frame as
follows [10], [24]:
) (
1 11 1 11 1 1 m d d e q q q s q
i L i
dt
d
L i R v e ' + + + = (7)
1 11 1 11 1 1 q q e d d d s d
i L i
dt
d
L i R v e + = (8)
) (
2 22 2 22 2 2 m d d e q q q s q
i L i
dt
d
L i R v e ' + + + = (9)
2 22 2 22 2 2 q q e d d d s d
i L i
dt
d
L i R v e + = (10)
r e
p
e e
2
= (11)
where
1 d
v and
1 q
v are the d-q axis voltages of abc winding;
2 d
v and
2 q
v are the d-q axis voltages of xyz winding;
1 d
i and
1 q
i are the d-q axis currents of abc winding;
2 d
i and
2 q
i are
the d-q axis currents of xyz winding;
11 d
L and
11 q
L are the d-q
axis inductances of abc winding;
22 d
L and
22 q
L are the d-q
axis inductances of xyz winding;
r
e is the rotor angular
velocity;
e
e is the electrical angular velocity;
m
' is the
permanent-magnet flux linkage; p is the number of pole pairs
of six-phase PMSM. Furthermore, the developed electric torque
e
T can be represented by the following equation:
(
) ] ) ( ) [(
] ) ( ) [(
2 2
3
2 2 22 22 2 2 22
1 1 11 11 1 1 11
q d q d q m d d
q d q d q m d d e
i i L L i i L
i i L L i i L
p
T
+ ' + +
+ ' + =
(12)
With the implementation of the field-oriented control, the
electric torque can be simplified as follows:
*
q t q q t e
i K i i K T = + = ) (
*
2
*
1
(13)
m t
p
K ' =
2 2
3
(14)
where
t
K is the torque coefficient;
*
1 q
i and
*
2 q
i are the q-axis
torque current commands of the dual three-phase;
*
q
i is the
q-axis torque current command. In addition, the mechanical
dynamic equation of the six-phase PMSM is:
L r
r
e
T B
dt
d
J T + + = e
e
(15)
where J is the inertia of six-phase PMSM; B is the damping
coefficient;
L
T is the load torque.
B. Fault Detection and Operating Decision Method
The open phases fault of the six-phase PMSM can be
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
detected according to the feedback of six-phase currents
a
i ,
b
i ,
c
i ,
x
i ,
y
i and
z
i . When the fault has been detected, the fault
detection and operating decision method can decrease the
torque fluctuation and smooth the output torque. The six-phase
currents detection equation can be described as:
2
1
2 detect
2
1
1
(
=
}
t
t
g
s
g
dt i
nT
I (16)
where z y x c b a g , , , , , = ;
s
nT t t =
1 2
is the detection interval;
s
T is the sampling time; n is the sampling iteration. The open
phases fault of six-phase PMSM can be detected according to
whether the detection equation (16) equal to zero or not. If the
motor operated under healthy condition and the speed
command is nonzero, the six-phase currents detection values
detect
a
I ,
detect
b
I ,
detect
c
I ,
detect
x
I ,
detect
y
I , and
detect
z
I according to (16) are
nonzero simultaneously. Thus, the fault detection can be
defined as follows:
= =
=
otherwise
and I if
k
ro g
g
1
0 0 0
* detect
e
(17)
where
*
ro
e represents the speed command. Using (16) and (17),
the operating decision method is proposed in the following:
= = =
=
otherwise
k or k or k if
S
c b a
1
0 0 0 0
1
(18)
= = =
=
otherwise
k or k or k if
S
z y x
1
0 0 0 0
2
(19)
where
1
S represents the operating condition of abc winding;
2
S represents the operating condition of xyz winding. The
fault detection and operating decision method of the six-phase
PMSM is shown in Fig. 1.
C. Fault Tolerant Control of Six-Phase PMSM Drive System
The control block diagram of the fault tolerant control
six-phase PMSM drive system is shown in Fig. 2, in which
*
r
e
represent the speed command;
r
u is the rotor position;
*
1 d
i and
*
2 d
i are the flux current commands of dual three-phase winding
and set to zero; SW1 and SW2 are the switches of dual
three-phase winding. Moreover, the adopted six-phase PMSM
is a 14-pole 220V 11.4A 2kW 2250rpm type, and the dual
three-phase windings are spatially shifted 30 electrical degrees.
The parameters of the six-phase PMSM are given as follows:
( )
2
sec / / 012 . 0 rad m N J = , ( ) sec / / 016 . 0 rad m N B = ,
A m N K
t
/ 492 . 0 = (20)
The overbar symbol represents the system parameter in the
nominal condition. Furthermore, using the fault detection and
operating decision method shown in (16) to (19), the speed
command
*
r
e and the torque current commands of the dual
three-phase
*
1 q
i and
*
2 q
i can be obtained from the speed
command lookup table and current command lookup table as
shown in Table I and Table II respectively. The q-axis torque
current command
*
q
i can be obtained using various controllers
such as ICSMC. In addition, the q-axis torque currents
1 q
i and
2 q
i and the flux currents
1 d
i and
2 d
i can be generated using
coordinate transformation from six-phase currents
a
i ,
b
i ,
c
i ,
x
i ,
y
i and
z
i , which are obtained using the hall sensors (the scaling
is 1V=6.8A). The voltage vectors
*
1 o
V ,
*
1 |
V ,
*
2 o
V , and
*
2 |
V of
stationary coordinate o| -axis can be obtained using current
control loop and coordinate transformation. Then, the space
vector pulse width modulation (SVPWM) technology is
adopted to control the IGBT inverter with switching frequency
10kHz. Finally, a dynamometer using a permanent magnet
synchronous generator (PMSG) as the load is adopted to test the
six-phase PMSM drive system. The adopted PMSG is a 220V
16.6A 2.5kW 3000rpm type. Additionally, considering the
rated output power of single three-phase winding, a solid state
relay (SSR) has been added in the system to adapt the
three-phase resistive load when faulty condition occurs.
III. PROPOSED CONTROL SYSTEM
Assuming that the system parameter variations, external
disturbances and nonlinear friction force are absent, then
field-oriented control six-phase PMSM drive system can be
formulated by rewriting (13) and (15) as follows:
* *
q n r n q
t
r r
i B A i
J
K
J
B
+ + = e e e (21)
where J B A
n
= ; 0 > = J K B
t n
. Now, considering the
existence of parameter variations, external disturbances and
nonlinear friction force for the field-oriented control six-phase
PMSM drive system, then
H i B A
T C C i B B A A
q n r n
L n q n r n r
+ + =
A + + A + + A + =
*
*
) ( ) ( ) (
e
e e
(22)
where J C
n
/ 1 = ; A A , B A and C A denote the uncertainties
introduced by system parameters J and B ; H is named the
lumped uncertainty and defined by
L n q r
T C C Bi A H ) (
*
A + + A + A e (23)
Here, the lumped uncertainty is assumed to be bounded
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Six-Phase
Currents
Detection
Equation
(16)
a
i
b
i
c
i
x
i
y
i
z
i
Fault
Detection
(17)
detect
a
I
detect
b
I
detect
c
I
detect
x
I
detect
y
I
detect
z
I
a
k
b
k
c
k
x
k
y
k
z
k
Operating
Decision
(18) and (19)
2 1
, S S
*
ro
e
Fig. 1. Fault detection and operating decision method.
SV
PWM
SV
PWM
Inverter
Six-Phase
PMSM
DC Link
A/D
QEP
r
u
e
u
ICSMC
*
q
i
TMS320F28335
Torque Meter
PMSG
Three-Phase
Resistive Load
*
1 |
V
*
1 o
V
*
2 |
V
*
2 o
V
y
i
x
i
e
e
dt d
Speed
Calculator
Current Control
and
Coordinate
Transformation
A/D
z
i
a
i
b
i
c
i
Fault Detection
and
Operating Decision
y
i
x
i
z
i
a
i
0
*
1 q
i
*
2 q
i
*
1 d
i
*
2 d
i
Current
Command
Lookup
Table
+
-
*
r
e Speed
Command
Lookup Table
r
e
SW2
SW1
b
i
c
i
Encoder
*
ro
e
2
p
2 1
, S S
SSR
Fig. 2. Block diagram of fault tolerant control six-phase PMSM drive system.
Table I Speed command lookup table.
Operating Condition of Dual
Three-Phase Winging
Speed Command
1 1
1 0
0 1
0 0 0
1
S
2
S
*
r
e
*
ro
e
*
sec 3
*
2
1
ro ro
e e
*
sec 3
*
2
1
ro ro
e e
Table II Current command lookup table.
Operating Condition of Dual
Three-Phase Winging
Current Command
1 1
1 0 0
0 1 0
0 0 0 0
1
S
2
S
*
1 q
i
*
2
1
q
i
*
2 q
i
*
2
1
q
i
*
2
1
q
i
*
2
1
q
i
s H (24)
where is a given positive constant. The control objective is
to design a control system so that the motor speed
r
e can track
any desired command
*
r
e , asymptotically. Assume that not
only
*
r
e but also its first derivative
*
r
e is all bounded functions
of time.
A. Conventional CSMC System
The control problem is to find a control law so that the state
r
e can track the desired command
*
r
e accurately under the
occurrence of the uncertainties. To achieve this control
objective, define the tracking error as follows:
r r
e e e =
*
(25)
Then, the generalized sliding surface is defined as follows [1]:
}
+ =
t
d e e S
0
(26)
where is a positive constant. Taking the derivative of (26)
and using (22), the following equation can be obtained:
e H i B A
e e S
q n r n r
e e
+ =
+ =
* *
(27)
where e is the derivative of e . Next, a second sliding surface,
named complementary sliding surface, is designed as follows
[4], [5]:
ed e S
t
C
}
=
0
(28)
Corresponding to the same positive constant , a significant
result concerning the relationship between S and
C
S can be
obtained in the following [4], [5]:
S S S S
C C
= + + ) ( (29)
Theorem 1: Considering the system dynamic equation
represented by (22), if the proposed CSMC law is designed as
(30), which is composed of an equivalent control law designed
as (31) and a hitting control law designed as (32), then the
stability of the proposed CSMC system can be guaranteed and
the tracking error will converge to a neighborhood of zero in
finite time.
hit eq q
i i i + =
*
(30)
| | ) (
1
*
S e A
B
i
r n r
n
eq
+ + = e e (31)
(
|
.
|
\
|
u
+
=
C
n
hit
S S
B
1
i sat (32)
where ) ( sat is the saturation function, which is designed to
reduce the chattering phenomena, with the boundary layer
thickness u [1]. The adopted saturation function is defined as
follows:
u s +
u < + < u
u
+
u > +
= |
.
|
\
|
u
+
C
C
C
C
C
S S if
S S if
S S
S S if
S S
1
1
sat
(33)
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Proof: The Lyapunov function candidate for the CSMC system
is chosen as follows:
( )
2 2
2
1
C CSMC
S S V + = (34)
Taking the time derivative of the Lyapunov function, and using
(27), (29), (30)-(33), one can obtain
0 ) (
) ( ) (
) )( ( ) (
) )( ( ) )( ( ) (
] )[ (
) )( (
) (
2
2
2
2
* *
s + =
+ + + s
+ + + + + s
+ + + + + =
+ + =
+ =
+ = + =
C
C C
C C C
C hit n C C
C q n r n r C
C C
C C C C CSMC
S S
H S S S S
H S S S S S S
H S S i B S S S S
S e H i B A S S
S S S S
S S S S S S S S S S V
e e
(35)
whenever u > +
C
S S . This ensures that any tracking error
trajectory e will reach the boundary layer, u s +
C
S S , in
finite time [1]. Moreover, the guaranteed ultimate bound of the
tracking error can be bounded as [4], [5]:
2
u
s e and u s e (36)
whenever in the boundary u s +
C
S S . Therefore, the CSMC
system guarantees the stability of the tracking error e even if
parametric uncertainty, external disturbance and friction force
exist.
Remark: Because the two sliding surfaces S and
C
S satisfied
the reaching condition simultaneously, all the trajectories of
tracking error starting outside the boundary layer, u > +
C
S S ,
will reach the boundary layer in finite time and slide along the
intersection of the two sliding surfaces ( 0 = =
C
S S ) toward a
neighborhood of zero, i.e.
2
u
s e and u s e . Therefore, in
the CSMC, a faster transient state response compared with the
SMC system is obtained [5] since the intersection of the two
sliding surfaces limits the system state trajectory.
The selection of the upper bound of the lumped uncertainty
(24) has a significant effect on the control performance.
However, the lumped uncertainty H shown in (23) contains
the uncertainties including mechanical parameter variations,
external disturbances and friction force. Since the parameter
variations of the system are difficult to measure and the exact
value of the external disturbances and friction force are also
difficult to know in advance in practical applications, it is very
difficult to implement the hitting control law (32) of the
proposed CSMC practically. Though the value of the upper
bound can be selected by the trial and error method to achieve
the requirement of convergence of tracking error in the CSMC,
this method is time consuming and cannot provide enough
robustness in practical applications. Therefore, an ICSMC is
developed in the following sections to alleviate the above
drawbacks.
B. TSK Type Fuzzy Neural Network with Asymmetric
Membership Function Estimator
A great advantage of TSKFNN-AMF is its representative
power; it is capable of describing a nonlinear system using
sufficient rules and training data. Moreover, with the use of
TSK fuzzy rules, the TSKFNN-AMF has good features such as
fast learning speed and fast convergence of the rates of tracking
errors. Therefore, a five-layer TSKFNN-AMF estimator with
two inputs and one output is developed in this study to estimate
the lumped uncertainty H online. The architecture of the
TSKFNN-AMF including the input layer (layer 1), the
membership layer (layer 2), the rule layer and TSK-type fuzzy
inference mechanism (layer 3), the consequent layer (layer 4)
and the output layer (layer 5) is shown in Fig. 3(a) and the
asymmetric Gaussian membership function in layer 2 is shown
in Fig. 3(b) respectively. The lumped uncertainty H is
assumed to be a constant during the estimation. The above
assumption is valid in practical digital processing of the
estimator since the sampling period, i.e. the executing interval
of the estimator program, is short enough as compared with the
variation of H .
The output of the TSKFNN-AMF estimator can be written as
follows:
W r W
T
t e H ) ) ( ( (37)
where | |
9 2
92 12 91 11
] [
e = = R c c c c
T T
2 1
W W W is the
adjustable weights vector;
1 9
) ( ) (
e = = R r Q Q is the
output vector of rule layer;
6 9
eR is the interconnection
weights matrix between layer 2 and layer 3 which is set to be
one; | |
1 2
) ( ) (
e = R t e t e r is the input state vector of
TSKFNN-AMF. Moreover, the asymmetric Gaussian function
| | { }
1 6 2 2
exp ) (
e = R m r r Q is chosen as the membership
function in the TSKFNN-AMF, in which
1 6
eR m and
1 12
] [
e = R are the adjustable parameter vectors of
means and standard deviations;
1 6
eR and
1 6
eR are the
left-sided and right-sided standard deviation of the asymmetric
Gaussian function respectively;
1 6
eR a is the interconnection
weights matrix between the layer 1 and layer 2 which is set to be
one.
C. ICSMC System
The configuration of the proposed ICSMC system is shown
in Fig. 4. According to the universal approximation property,
there exists an optimal TSKFNN-AMF estimator
*
H to learn
the lumped uncertainty H as follows:
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Layer 1
(Input Layer)
Layer 2
(Membership Layer)
Layer 4
(Consequent Layer)
Layer 5
(Output Layer)
Layer 3
(Rule Layer and
TSK Type Fuzzy
Inference
Mechanism)
[ [ [
[ [ [
E
E E E
11
c
21
c
12
c
22
c
19
c
29
c
...
...
(a)
H
r
W
Q
W r
T
a
0
1
(b)
m
o o
r
r
Q(r)
Q
Fig. 3. TSK type fuzzy neural network with asymmetric membership function:
(a) Structure of TSKFNN-AMF. (b) Asymmetric Gaussian function in
membership layer of TSKFNN-AMF.
c c + = + =
- -
) , (
* * *
m W r
T
H H (38)
where c is the minimum reconstructed error;
*
W ,
-
m ,
-
and
-
are the optimal parameters of W , m , and ,
respectively, in the TSKFNN-AMF. Moreover, rewriting (38),
the TSKFNN-AMF estimator can be obtained as
r
T
u H + = ) , (
m W r (39)
where
r
u is a robust controller, which is designed to
compensate the difference between H and H
; W
, m ,
and
are the estimated parameters of W , m , and
respectively. Then, subtracting (38) from (39), the
approximation error H
~
is denoted as
r
T T
u H H H + = =
- -
W r W r
~
c (40)
where W W W
~
*
= ,
~
*
= . In this study, a control
methodology is proposed to guarantee the asymptotical stability
of the closed-loop control system and to achieve perfect
tracking performance with the parameters of the
TSKFNN-AMF tuning online. To achieve this goal, a
linearization technique is applied to transform the nonlinear
TSKFNN-AMF into partially linear form to obtain the
expansion of
~
in a Taylor series:
(
(
(
(
(
= =
6
2
1
~
~
~
~ ~
q
q
q
Q
N Q m Q
N
m m
m
m
m
m
m m
+ +
+
(
(
(
(
(
(
(
(
c
c
c
c
c
c
+
(
(
(
(
(
(
(
(
c
c
c
c
c
c
=
= =
~ ~
) ( ) (
*
6
2
1
*
6
2
1
T T
q
q
q
q
q
q
(41)
where Q Q Q
~
*
= ;
*
Q is the optimal parameter of Q ; Q
is
the estimated parameter of
*
Q ;
6 6
6 2 1
| ] [
=
e c c c c c c = R m m m Q
m m m
q q q ;
| |
Q
6 2 1
|
=
c c c c c c = q q q
12 6
eR ;
m m m
~ *
= ;
~
=
-
;
1 6
eR N is a vector of higher-order
terms. Rewriting (41), it can be obtained that
N m
m
+ + + =
- ~ ~
T T
(42)
where
6 9
e = R Q
m m
T
,
12 9
e = R Q
T
, and represent as
(
(
(
(
(
(
(
(
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
=
6
9
2
9
1
9
6
2
2
2
1
2
6
1
2
1
1
1
m
m
(43)
(
(
(
(
(
(
(
(
(
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
c
=
6
9
1
9
6
9
1
9
6
2
1
2
6
2
1
2
6
1
1
1
6
1
1
1
l l r r
l l r r
l l r r
T
o o o o
o o o o
o o o o
(44)
According to (38), (39) and (42), the approximation error (40)
can be rewritten as
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
r
e
dt
d
*
r
e
ICSMC System
Sliding Surface
(26) & (28)
}
_
+
n
A
+
_
+
Adaptation Law
(49)-(52)
W, r,
H
e
dt
d e
TSKFNN-AMF Estimator
r
u
*
q
i
+
+
ICSMC
i
_
+
S +
Adaptation Law
(53)
Robust
Controller
(48) c
S S +
c
S S +
1
n
B
*
r
e
r
e
F
Fault Tolerant Control
Six-Phase PMSM
Drive System
r n
A e
e
e
[ [ [
[ [ [
E
E E E
11 c 21 c 12 c 22 c 19 c 29 c
...
...
H
r
W
Q
W r T
a
Fig. 4. Configuration of ICSMC system.
| |
| |
| |
r
T T T T T
r
T
T T T T T
r
T T T T
r
T T T T
u F
u
u
u H
+ + + =
+ +
+ + + + =
+ + + + =
+ + + + =
W r m W r W r
N W r
W W m W m W W r
N W r W m W W r
W r N m W r
m
m m
m
m
~
~
~
~
~
~
~
~
~
~
~ ~
~
~ ~
~
*
* * *
*
c
c
c
(45)
where c + + + = N W r W r m W r
*
m i
T T T
i
T T
F
~
~
~
~
denotes the
uncertain term. Since the sampling interval in the experiment is
short enough as compared with the variation of F , the
uncertain term is also assumed to be a constant during the
estimation.
Theorem 2: Considering the system dynamic equation
represented by (22), if the proposed ICSMC is designed as (46),
which is composed of the equivalent control law designed as
(47), the robust controller designed as (48) with its adaptive
learning algorithm designed as (53), and the adaptive learning
algorithms of the TSKFNN-AMF estimator designed as
(49)-(52), then the proposed ICSMC system guarantees the
asymptotical stability of the tracking error simultaneously.
r ICSMC q
u i i + =
*
(46)
]
) ( [
1
*
W r
T
r n r
n
ICSMC
S e A
B
i + + = e e (47)
F u
r
=
(48)
W
) (
1 1
e S S
C
T
+ = q
(49)
W
) (
2 2
e S S
C
T
+ = q
(50)
T T
C
T
S S
m
W r m
) (
3
+ = q
(51)
T T
C
T
S S
W r
) (
4
+ = q
(52)
) (
5 C
S S F + = q
(53)
where
1
q ,
2
q ,
3
q ,
4
q and
5
q are positive learning rates.
Proof: Choose the Lyapunov function candidate for the ICSMC
system as
( )
F F
S S V
T T T
T T
C ICSMC
~ ~
2
1
~ ~
2
1
~ ~
2
1
~ ~
2
1 ~ ~
2
1
2
1
5 4 3
2 2
2
1 1
1
2 2
q q q
q q
+ + +
+ + + =
m m
W W W W
(54)
where F F F
~
= is the approximate error of F . Then, taking
the time derivative of the Lyapunov function and using (26),
(28), and (46)-(53), one can obtain
]
~
~
~
~
(
) ( )[ (
~
1
~
1
~
~ 1
~ 1
2 1
5 4 3
2 2
2
1 1
1
r
T T T T
C C
T T T
T T
C C ICSMC
u F e e
S S S S
F F
S S S S V
+ + + +
+ + =
+ =
W r m W r W W
m m
W W W W
m
q q q
q q
0 ) (
]
~
1 ~
) ( [
]
~
1
~
) ( [
]
~
1
~
) ( [
]
~ 1
~
) ( [
]
~ 1
~
) ( [ ) (
~
1
~
1
~
~ 1
~ 1
2
5
4
3
2 2
2
2
1 1
1
1
2
5 4
3
2 2
2
1 1
1
s + =
+ +
+ +
+ +
+ +
+ + =
C
T
C
T T T
C
T T T
C
T
C
T
C C
T T
T T T
S S
F F F S S
S S
S S
S S e
S S e S S
F F
q
q
q
q
q
q q
q q q
W r
m m m W r
W W W
W W W
m m W W W W
m
(55)
Since 0 ) , ( s
C ICSMC
S S V
,
ICSMC
V
is negative semi-definite, i.e.,
) ) 0 ( ), 0 ( ( ) ) ( ), ( (
C ICSMC C ICSMC
S S V t S t S V s , which implies that
) (t S and ) (t S
C
are bounded. Now, define the following term:
) ) ( ), ( ( ) ( ) (
2
t S t S V S S t P
C ICSMC C ICSMC
s + (56)
then
) ) ( ), ( ( ) ) 0 ( ), 0 ( ( ) (
0
t S t S V S S V d P
C ICSMC
t
C ICSMC ICSMC
s
}
t t (57)
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Moreover, since ) ) 0 ( ), 0 ( (
C ICSMC
S S V is bounded and
) ) ( ), ( ( t S t S V
C ICSMC
is nonincreasing and bounded, the following
result can be concluded:
}
<
t
ICSMC
t
d P
0
) ( lim t t (58)
Furthermore, ) (t P
ICSMC
is also bounded. Then, ) (t P
ICSMC
is
uniformly continuous. Using Barbalats lemma [1], the
following result can be obtained:
0 ) ( lim =
t P
ICSMC
t
(59)
Thus, it can be implied that ) (t S and ) (t S
C
will converge to
zero as t . In addition, 0 ) ( lim =
t e
t
and 0 ) ( lim =
t e
t
.
Therefore, the ICSMC system guarantees the asymptotical
stability of the tracking error e simultaneously, even if the
parameter variations, external disturbances and friction force
exist.
IV. EXPERIMENTAL RESULTS
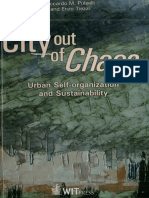
A photo of the experimental setup including the six-phase
PMSM and its drive system, the DSP 28335 extension board,
dynamometer, open phases switching breakers, PMSG,
three-phase resistive load, SSR and the development system
using personal computer (PC) is shown in Fig. 5. A
TMS320F28335 floating-point DSP is the core of DSP 28335
extension board. Moreover, analog-to-digital converters (ADCs)
with voltage level shift circuits, general purpose input/outputs
(GPIOs) with voltage level shift circuits, digital-to-analog
converters (DACs), PWM and encoder interface are included in
the DSP 28335 extension board. Furthermore, the proposed
fault tolerant control system is realized in the DSP using the C
and Assembly languages. All the programs are developed in
the PC Windows environment and then downloaded to the
Flash ROM. The methodology proposed for the implementation
of the real-time control system consists of the main program and
one interrupt service routine (ISR). In a main program,
parameters and input/output initialization are set first. Then, the
interrupt interval for the ISR is set. After starting the interrupt,
the ISR with 1ms sampling rate is used for the encoder interface,
quadrature encoder pulse (QEP), and DACs. The ISR first reads
the position of the six-phase PMSM from the encoder and
obtains the velocity of the six-phase PMSM. Next, the ISR
calculates the tracking errors and generates the current
command
*
1 q
i and
*
2 q
i according to the proposed control
algorithm, fault detection and operating decision method.
Finally, the calculated commands of SVPWM are sent to the
inverter of the six-phase PMSM drive system.
The control objective is to control the speed of the six-phase
PMSM to tracking the reference speed profile with minimum
tracking error using the proposed ICSMC under healthy and
Six-Phase PMSM
Six-Phase
PMSM Drive
System Development
System using
PC
Three-Phase
Resistive Load
Dynamometer
PMSG
Torque Meter
DSP 28335
Extension Board
Open Phases
Switching Breakers
SSR
Fig. 5. Photograph of experimental setup.
faulty conditions. The conventional proportional-integral (PI)
control, the CSMC shown in (30)-(32) and the TSKFNN-AMF
control shown in Fig. 3 are also implemented in the experiment
for the comparison of the control performance. In the
TSKFNN-AMF control, the TSKFNN-AMF is adopted as the
main and only controller. Moreover, in order to verify the
control performance in healthy condition, two load cases are
tested with a periodical trapezoidal wave (0.056Hz) reference
speed profile: one is the y-connected three-phase resistive load
7 O for the PMSG (Case 1); the other is y-connected
three-phase resistive load 3.5 O for the PMSG (Case 2). The
corresponding load powers are 999.81W and 1999.62W
respectively. Furthermore, two cases of the open phases of
motor are tested to demonstrate the control performance in
faulty condition: one is abc winding open (Case 3); the other is
xyz winding open (Case 4). In faulty condition, the reference
speed profile is set to be 2250 rpm at the beginning and reduced
to half of the speed after three seconds when the fault is detected
as shown in Table I. Considering the rated output power of
single three-phase winding, the three-phase resistive load will
also be changed from 3.5 O to 7 O immediately by using the
SSR when the fault is detected, and then changed to 3.5 O after
six seconds in order to investigate the robustness of the
proposed fault tolerant control system. The corresponding load
powers are 1999.62W, 999.81W, 499.905W, and 999.81W
respectively. In addition, to measure the control performance of
the proposed fault tolerant control system, the maximum
tracking error
M
T , the average tracking error
aver
T and the
standard deviation of the tracking error
S
T for the trajectory
tracking are defined as follows [11]:
) ( ) ( ) ( where
)), ( ( max
*
N N N T
N T T
r r error
error
N
M
e e =
=
(60)
h
N T
T
h
N
error
aver
=
=
1
) (
(61)
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
=
=
h
N
aver error S
h T N T T
1
2
) ) ( ( (62)
Additionally, the parameters of the PI control, the CSMC, the
TSKFNN-AMF control, and the proposed ICSMC are given as
follows:
65 . 0 =
p
k , 03 . 0 =
i
k , 5 = , 4 = , 08 . 0 = u , 001 . 0
1
= q ,
001 . 0
2
= q , 0005 . 0
3
= q , 0005 . 0
4
= q , 002 . 0
5
= q (63)
All the parameters in the proposed fault tolerant control system
are selected by trial-and-error to achieve the best transient
control performance in the experiment considering the
requirement of stability. Besides, the values of all the weights
trained online of the TSKFNN-AMF are initialized with zero.
Some experimental results are provided to demonstrate the
effectiveness of the proposed fault tolerant control system
under healthy and faulty conditions. Figure 6 depicts the
experimental results of the command tracking due to the
periodical trapezoidal reference speed profile using the PI
control under healthy condition. The tracking responses of the
six-phase PMSM at Case 1 and Case 2 are shown in Figs. 6(a)
and 6(d); the tracking errors are shown in Figs. 6(b) and 6(e);
the control output
*
q
i are shown in Figs. 6(c) and 6(f). Moreover,
Fig. 7 depicts the experimental results of the command tracking
using the proposed fault tolerant control via PI control at Case 3
and Case 4. The tracking responses of the six-phase PMSM are
shown in Figs. 7(a) and 7(d); the tracking errors are shown in
Figs. 7(b) and 7(e); the q-axis torque currents of the dual
three-phase winding are shown in Figs. 7(c) and 7(f).
Furthermore, Fig. 8 depicts the experimental results of the
command tracking due to the periodical trapezoidal reference
speed profile using the CSMC under healthy condition. The
tracking responses of the six-phase PMSM at Case 1 and Case 2
are shown in Figs. 8(a) and 8(d); the tracking errors are shown
in Figs. 8(b) and 8(e); the control output
*
q
i are shown in Figs.
8(c) and 8(f). In addition, Fig. 9 depicts the experimental results
of the command tracking using the proposed fault tolerant
control via CSMC at Case 3 and Case 4. The tracking responses
of the six-phase PMSM are shown in Figs. 9(a) and 9(d); the
tracking errors are shown in Figs. 9(b) and 9(e); the q-axis
torque currents of the dual three-phase winding are shown in
Figs. 9(c) and 9(f). From the experimental results, though
favorable steady-state tracking responses can be obtained at
both Case 1 and Case 2 using the PI control and the CSMC as
shown in Figs. 6(a), 6(d), 8(a) and 8(d), the transient responses
of the PI control and the CSMC are degraded at both Case 3 and
Case 4 due to their fixed control parameters and fixed lumped
uncertainty as shown in Figs. 7(a), 7(d), 9(a) and 9(d)
respectively.
Figure 10 depicts the experimental results of the command
tracking due to the periodical trapezoidal reference speed
profile using the TSKFNN-AMF control under healthy
condition. The tracking responses of the six-phase PMSM at
Case 1 and Case 2 are shown in Figs. 10(a) and 10(d); the
tracking errors are shown in Figs. 10(b) and 10(e); the control
output
*
q
i are shown in Figs. 10(c) and 10(f). Moreover, Fig. 11
depicts the experimental results of the command tracking using
the proposed fault tolerant control via TSKFNN-AMF control
at Case 3 and Case 4. The tracking responses of the six-phase
PMSM are shown in Figs. 11(a) and 11(d); the tracking errors
are shown in Figs. 11(b) and 11(e); the q-axis torque currents of
the dual three-phase winding are shown in Figs. 11(c) and 11(f).
From the experimental results, favorable steady-state tracking
responses also can be obtained at both Case 1 and Case 2 using
the TSKFNN-AMF control as shown in Figs. 10(a) and 10(d).
Compared to the PI control and the CSMC, the transient
response is improved using the TSKFNN-AMF control due to
its AMFs and online learning capability of the network
parameters. However, the transient speed dip at both Case 3 and
Case 4 as shown in Figs. 11(a) and 11(d) still requires further
improvement. Furthermore, Fig. 12 depicts the experimental
results of the command tracking due to the periodical
trapezoidal reference speed profile using the proposed ICSMC
under healthy condition. The tracking responses of the
six-phase PMSM at Case 1 and Case 2 are shown in Figs. 12(a)
and 12(e); the tracking errors are shown in Figs. 12(b) and 12(f);
the control output
*
q
i are shown in Figs. 12(c) and 12(g); the
lumped uncertainties H
estimated by the TSKFNN-AMF
estimator are shown in Figs. 12(d) and 12(h). In addition, Fig.
13 depicts the experimental results of the command tracking
using the proposed fault tolerant control via ICSMC at Case 3
and Case 4. The tracking responses of the six-phase PMSM are
shown in Figs. 13(a) and 13(e); the tracking errors are shown in
Figs. 13(b) and 13(f); the q-axis torque currents of the dual
three-phase winding are shown in Figs. 13(c) and 13(g); the
lumped uncertainties H
estimated by the TSKFNN-AMF
estimator are shown in Figs. 13(d) and 13(h). From the
experimental results, excellent tracking responses of the
six-phase PMSM can be obtained at all cases as shown in Figs.
12(a), 12(e), 13(a) and 13(e). Additionally, the effective online
learning capability for the network parameters of the proposed
TSKFNN-AMF estimator has been shown in Figs. 12(d), 12(h),
13(d) and 13(h).
The proposed fault detection and operating decision method
can detect the open phases of the motor effectively using the PI
control, the CSMC, the TSKFNN-AMF control and the
proposed ICSMC as shown in the above experimental results.
Moreover, compared with the PI control, the CSMC and the
TSKFNN-AMF control, the transient responses of the reference
speed command tracking have been much improved using the
proposed ICSMC as shown in Figs. 13(a) and 13(e) under faulty
condition. Therefore, the fault tolerant control via ICSMC can
provide better control performance of the motor under faulty
condition. Furthermore, the performance measurings of the PI
control, the CSMC, the TSKFNN-AMF control and the
proposed ICSMC under healthy (Case 1 and Case 2) and faulty
(Case 3 and Case 4) conditions are shown in Figs. 14(a), 14(b),
14(c) and 14(d) respectively. Comparing the performance
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
(a)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(b)
2250rpm
0rpm
0A
*
q
i
(c)
5sec
128rpm
5sec
13.6A
(d)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(e)
2250rpm
0rpm
0A
*
q
i
(f)
5sec
128rpm
5sec
13.6A
Fig. 6. Experimental results of PI control for periodical trapezoidal reference
speed command: (a) Speed tracking response at Case 1. (b) Speed tracking error
at Case 1. (c) Control output at Case 1. (d) Speed tracking response at Case 2. (e)
Speed tracking error at Case 2. (f) Control output at Case 2.
measurings of the PI control, the CSMC, the TSKFNN-AMF
control and the ICSMC at all testing conditions, the ICSMC has
the lowest average and standard deviation of the tracking errors
at all cases. In addition, the degraded control performance of the
PI control and the CSMC can be improved by using the
TSKFNN-AMF control due to its AMFs and online learning
ability. However, in practical applications, the approximated
limitation is existent in the TSKFNN-AMF control. Therefore,
it is difficult to achieve perfect tracking response only using the
TSKFNN-AMF control. Hence, the ICSMC using
TSKFNN-AMF has been proposed to further improve the
control performance owing to its online estimating scheme of
(a)
1sec
0rpm
1280rpm
Tracking Error
(b)
0rpm
(c)
1sec
512rpm
1sec
13.6A
Speed
Command
1125 rpm
2250 rpm
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
*
1 q
i 1 q
i
*
2 q
i
2 q
i
0A
0A
(d)
1sec
0rpm
1280rpm
Tracking Error
(e)
0rpm
(f)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i
1 q
i
*
2 q
i 2 q
i
0A
0A
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
Fig. 7. Experimental results of fault tolerant control via PI control: (a) Speed
tracking response at Case 3. (b) Speed tracking error at Case 3. (c) q-axis torque
currents of the dual three-phase winding at Case 3. (d) Speed tracking response
at Case 4. (e) Speed tracking error at Case 4. (f) q-axis torque currents of the
dual three-phase winding at Case 4.
the lumped uncertainty.
V. CONCLUSIONS
This study has successfully demonstrated the development
and implementation of the ICSMC for the fault tolerant control
of the six-phase PMSM drive system with open phases. The
dynamics of the six-phase PMSM drive system with lumped
uncertainty was described first. Then, the fault detection and
operating decision method were introduced. Moreover, the
ICSMC was developed to achieve the required control
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
(a)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(b)
2250rpm
0rpm
0A
*
q
i
(c)
5sec
128rpm
5sec
13.6A
(d)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(e)
2250rpm
0rpm
0A
*
q
i
(f)
5sec
128rpm
5sec
13.6A
Fig. 8. Experimental results of CSMC for periodical trapezoidal reference speed
command: (a) Speed tracking response at Case 1. (b) Speed tracking error at
Case 1. (c) Control output at Case 1. (d) Speed tracking response at Case 2. (e)
Speed tracking error at Case 2. (f) Control output at Case 2.
performance and to maintain the stability of six-phase PMSM
drive system under faulty condition. In this approach, the
TSKFNN-AMF was designed to estimate the lumped
uncertainty of the system. Furthermore, the adaptive learning
algorithms for the online training of the TSKFNN-AMF were
derived using the Lyapunov theorem. In addition, the proposed
fault tolerant control system via ICSMC was implemented
using a floating-point DSP. Finally, the effectiveness of the
proposed fault tolerant control scheme under various test
conditions has been confirmed by experimentation. From the
experimental results and performance measurings, the proposed
ICSMC using TSKFNN-AMF possesses both robust and
(a)
1sec
0rpm
1280rpm
Tracking Error
(b)
0rpm
(c)
1sec
512rpm
1sec
13.6A
Speed
Command
1125 rpm
2250 rpm
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
*
1 q
i 1 q
i
*
2 q
i
2 q
i
0A
0A
(d)
1sec
0rpm
1280rpm
Tracking Error
(e)
0rpm
(f)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i
1 q
i
*
2 q
i 2 q
i
0A
0A
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
Fig. 9. Experimental results of fault tolerant control via CSMC: (a) Speed
tracking response at Case 3. (b) Speed tracking error at Case 3. (c) q-axis torque
currents of the dual three-phase winding at Case 3. (d) Speed tracking response
at Case 4. (e) Speed tracking error at Case 4. (f) q-axis torque currents of the
dual three-phase winding at Case 4.
accurate control performance for the fault tolerant control
six-phase PMSM drive system under both healthy and faulty
conditions.
ACKNOWLEDGMENTS
The authors would like to acknowledge the financial support
of the National Science Council of Taiwan, R.O.C. through its
grant NSC 101-2221-E-008-104-MY3.
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
(a)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(b)
2250rpm
0rpm
0A
*
q
i
(c)
5sec
128rpm
5sec
13.6A
(d)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(e)
2250rpm
0rpm
0A
*
q
i
(f)
5sec
128rpm
5sec
13.6A
Fig. 10. Experimental results of TSKFNN-AMF control for periodical
trapezoidal reference speed command: (a) Speed tracking response at Case 1. (b)
Speed tracking error at Case 1. (c) Control output at Case 1. (d) Speed tracking
response at Case 2. (e) Speed tracking error at Case 2. (f) Control output at Case
2.
REFERENCES
[1] J. J. E. Slotine and W. Li, Applied Nonlinear Control. Prentice-Hall, NJ,
1991.
[2] B. Beltran, T. Ahmed-Ali, and M. Benbouzid, High-order sliding-mode
control of variable-speed wind turbines, IEEE Trans. Indust. Electron.,
vol. 56, no. 9, pp. 3314-3321, 2009.
[3] B. Veselic, B. Perunicic-Drazenovic, and C. Milosavljevic, Improved
discrete-time sliding-mode position control using Euler velocity
estimation, IEEE Trans. Indust. Electron., vol. 57, no. 11, pp. 3840-3847,
2010.
[4] H. M. Chen, J. P. Su, and J. C. Renn, A novel sliding mode control of an
electrohydraulic position servo system, IEICE Trans. Fundamentals, vol.
E85-A, no. 8, pp. 1928-1936, 2002.
(a)
1sec
0rpm
1280rpm
Tracking Error
(b)
0rpm
(c)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i 1 q
i
*
2 q
i
2 q
i
0A
0A
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
(d)
1sec
0rpm
1280rpm
Tracking Error
(e)
0rpm
(f)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i
1 q
i
*
2 q
i 2 q
i
0A
0A
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
Fig. 11. Experimental results of fault tolerant control via TSKFNN-AMF
control: (a) Speed tracking response at Case 3. (b) Speed tracking error at Case 3.
(c) q-axis torque currents of the dual three-phase winding at Case 3. (d) Speed
tracking response at Case 4. (e) Speed tracking error at Case 4. (f) q-axis torque
currents of the dual three-phase winding at Case 4.
[5] J. P. Su and C. C. Wang, Complementary sliding control of non-linear
system, Int. J. Control, vol. 75, no. 5, pp. 360-368, 2002.
[6] L. X. Wang, A course in fuzzy systems and control. Prentice-Hall Press,
1997.
[7] S. Cong and Y. Liang, PID-like neural network nonlinear adaptive
control for uncertain multivariable motion control systems, IEEE Trans.
Indust. Electron., vol. 56, no. 10, pp. 3872-38795, 2009.
[8] T. Orlowska-Kowalska, M. Dybkowski, and K.Szabat, Adaptive
sliding-mode neuro-fuzzy control of the two-mass induction motor drive
without mechanical sensors, IEEE Trans. Indust. Electron., vol. 57, no.
2, pp. 553-564, 2010.
[9] M. J. Er and C. Deng, Obstacle avoidance of a mobile robot using hybrid
learning approach, IEEE Trans. Indust. Electron., vol. 52, no. 3, pp.
898-905, 2005.
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
(a)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
Tracking Error
(b)
2250rpm
0rpm
0A
*
q
i
(c)
5sec
128rpm
5sec
13.6A
(d)
0V
H
5sec
2V
(e)
5sec
0rpm
Speed
Command
Motor
Speed
2250rpm
1280rpm
(f)
2250rpm
0rpm
0A
*
q
i
(g)
5sec
128rpm
5sec
13.6A
(h)
0V
H
5sec
2V
Tracking Error
Fig. 12. Experimental results of ICSMC for periodical trapezoidal reference
speed command: (a) Speed tracking response at Case 1. (b) Speed tracking error
at Case 1. (c) Control output at Case 1. (d) Estimated value of lumped
uncertainty using TSKFNN-AMF estimator at Case 1. (e) Speed tracking
response at Case 2. (f) Speed tracking error at Case 2. (g) Control output at Case
2. (h) Estimated value of lumped uncertainty using TSKFNN-AMF estimator at
Case 2.
(a)
1sec
0rpm
1280rpm
Tracking Error
(b)
0rpm
(c)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i 1 q
i
*
2 q
i
2 q
i
0A
0A
(d)
0V
H
1sec
2V
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
(e)
1sec
0rpm
1280rpm
Tracking Error
(f)
0rpm
(g)
1sec
512rpm
1sec
13.6A
1125 rpm
2250 rpm
*
1 q
i
1 q
i
*
2 q
i 2 q
i
0A
0A
(h)
0V
H
1sec
2V
Fault Occurs and
Load Changes to 7
Motor
Speed
Load Changes
to 3.5
Speed
Command
Fig. 13. Experimental results of fault tolerant control via ICSMC: (a) Speed
tracking response at Case 3. (b) Speed tracking error at Case 3. (c) q-axis torque
currents of the dual three-phase winding at Case 3. (d) Estimated value of
lumped uncertainty using TSKFNN-AMF estimator at Case 3. (e) Speed
tracking response at Case 4. (f) Speed tracking error at Case 4. (g) q-axis torque
currents of the dual three-phase winding at Case 4. (h) Estimated value of
lumped uncertainty using TSKFNN-AMF estimator at Case 4.
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Fig. 14. Performance measurings: (a) Performance measurings at Case 1. (b)
Performance measurings at Case 2. (c) Performance measurings at Case 3. (d)
Performance measurings at Case 4.
[10] F. J. Lin and P. H. Shen, Robust fuzzy neural network sliding-mode
control for two-axis motion control system, IEEE Trans. Indust.
Electron., vol. 53, no. 4, pp. 1209-1225, 2006.
[11] F. J. Lin, P. H. Shieh, and P. H. Chou, Robust adaptive backstepping
motion control of linear ultrasonic motors using fuzzy neural network,
IEEE Trans. Fuzzy Syst., vol. 16, no. 3, pp. 672-692, 2008.
[12] A. Gajate, R. E. Haber, P. I. Vega, and J. R. Alique, A transductive
neuro-fuzzy controller: application to a drilling process, IEEE Trans.
Neural Network, vol. 21, no. 7, pp. 1158-1167, 2010.
[13] C. H. Lu, Wavelet fuzzy neural networks for identification and predictive
control of dynamic systems, IEEE Trans. Indust. Electron., vol. 58, no.
7, pp. 3046-3058, 2011.
[14] R. J. Lian, Intelligent controller for robotic motion control, IEEE Trans.
Indust. Electron., vol. 58, no. 11, pp. 5220-5230, 2011.
[15] F. J. Lin, P. H. Chou, C. S. Chen, and Y. S. Lin, DSP-based cross-coupled
synchronous control for dual linear motors via intelligent complementary
sliding mode control, IEEE Trans. Indust. Electron., vol. 59, no. 2, pp.
1061-1073, 2012.
[16] H. Chaoui and P. Sicard, Adaptive fuzzy logic control of permanent
magnet synchronous machines with nonlinear friction, IEEE Trans.
Indust. Electron., vol. 59, no. 2, pp. 1123-1133, 2012.
[17] M. A. Khanesar, E. Kayacan, M. Teshnehlab, and O. Kaynak, Extended
Kalman filter based learning algorithm for type-2 fuzzy logic systems and
its experimental evaluation, IEEE Trans. Indust. Electron., vol. 59, no.
11, pp. 4443- 4455, 2012.
[18] H. Y. Pan, C. H. Lee, F. K. Chang, and S. K. Chang, Construction of
asymmetric type 2 fuzzy membership function and application in time
series prediction, in Proc. Int. Conf. Machine Learning and Cybernetics,
pp. 2024-2030, 2007.
[19] K. H. Cheng, C. F. Hsu, C. M. Lin, T. T. Lee, and C. Li, Fuzzy neural
sliding mode control for dc-dc converters using asymmetric gaussian
membership functions, IEEE Trans. Indust. Electron., vol. 54, no. 3, pp.
1528-1536, 2004.
[20] C. H. Lee, T. W. Hu, C. T. Lee, and Y. C. Lee, A recurrent interval
type-2 fuzzy neural network with asymmetric membership functions for
nonlinear system identification, in Proc. IEEE Conf. Fuzzy System, pp.
1496-1502, 2008.
[21] Y. Izumikawa, K. Yubai, and J. Hirai, Fault-tolerant control system of
flexible arm for sensor fault by using reaction force observer,
IEEE/ASME Trans. Mechatronics, vol. 10, no. 4, pp. 391-396, 2005.
[22] M. E. H. Benbouzid, D. Diallo, and M. Zeraoulia, Advanced
fault-tolerant control of induction-motor drives for EV/HEV traction
applications: from conventional to modern and intelligent control
techniques, IEEE Trans. Vehicu. Techn., vol. 56, no. 2, pp. 519-528,
2007.
[23] R. Kianinezhad, B. Nahid-Mobarakeh, L. Baghli, F. Betin, and G.
Capolino, Modeling and control of six-phase symmetrical induction
machine under fault condition due to open phases, IEEE Trans. Indust.
Appl., vol. 55, no. 5, pp. 1966-1977, 2008.
[24] M. A. Fnaiech, F. Betin, G. Capolino, and F. Fnaiech, Fuzzy logic and
sliding-mode controls applied to six-phase induction machine with open
phases, IEEE Trans. Indust. Appl., vol. 57, no. 1, pp. 354-364, 2010.
[25] S. Dwari and L. Parsa, Fault-tolerant control of five-phase
permanent-magnet motors with trapezoidal back EMF, IEEE Trans.
Indust. Electron., vol. 58, no. 2, pp. 476-485, 2011.
[26] X. L. Wang, Q. C. Zhong, Z. Q. Deng, and S. Z. Yue, Current-controlled
multiphase slice permanent magnetic bearingless motors with
open-circuited phases: fault-tolerant controllability and its verification,
IEEE Trans. Indust. Electron., vol. 59, no. 5, pp. 2059-2072, 2012.
[27] X. Huang, T. G. Habetler, and R. G. Harley, Detection of rotor
eccentricity faults in a closed-loop drive-connected induction motor using
an artificial neural network, IEEE Trans. Power Electr., vol. 22, no. 4, pp.
1552-1559, 2007.
[28] A. Sadeghian, Z. Ye, and B. Wu, Online detection of broken rotor bars in
induction motors by wavelet packet decomposition and artificial neural
networks, IEEE Trans. Instrument. And Measure., vol. 58, no. 7, pp.
2253-2263, 2009.
[29] W. W. Tan and H. Huo, A generic neurofuzzy model-based approach for
detecting faults in induction motors, IEEE Trans. Indust. Electron., vol.
52, no. 5, pp. 1420-1427, 2005.
[30] J. Quiroga, D. A. Cartes, C. S. Edrington and L. Liu, Neural network
based fault detection of PMSM stator winding short under load
fluctuation, in Proceedings International Power Electronics and Motion
Control Conference, pp. 793-798, 2008.
[31] V. N. Ghate and S. V. Dudul, Cascade neural-network-based fault
classifier for three-phase induction motor, IEEE Trans. Indust. Electron.,
vol. 58, no. 5, pp. 1555-1563, 2011.
[32] M. Seera, P. L. Chee, D. Ishak, and H. Singh, Fault detection and
diagnosis of induction motors using motor current signature analysis and a
hybrid FMMCART model, IEEE Trans. Neural Networks and Learning
Systems, vol. 23, no. 1, pp. 97-108, 2012.
[33] J. C. Salmon and B. W. Williams, A split-wound induction motor design
to improve the reliability of PWM inverter drives, IEEE Trans. Indust.
Appl., vol. 26, no. 1, pp. 143-150, 1990.
[34] R. O. C. Lyra and T. A. Lipo, Torque density improvement in a six-phase
induction motor with third harmonic current injection, IEEE Trans.
Indust. Appl., vol. 38, no. 5, pp. 1351-1360, 2002.
[35] H. Zhang, A. Jouanne, S. Dai, K. Wallace, and F. Wang, Multilevel
inverter modulation schemes to eliminate common-mode voltages, IEEE
Trans. Indust. Appl., vol. 36, no. 6, pp. 1645-1653, 2000.
[36] S. Green, D. J. Atkinson, A. G. Jack, B. C. Mecrow, and A. King,
Sensorless operation of a fault tolerant PM drive, IEE Proc. Electr.
Power Appl., vol. 150, no. 2, pp. 117-125, 2003.
[37] B. Stumberger, G. Stumberger, A. Hamler, M. Trlep, M. Jesenik, and V.
Gorican, Increasing of output power capability in a six-phase
flux-weakened permanent magnet synchronous motor with a third
harmonic current injection, IEEE Trans. Magnet., vol. 39, no. 5, pp.
3343-3345, 2003.
Faa-Jeng Lin (Member93, Senior Member99)
received the B.S. and M.S. degrees in electrical
engineering from National Cheng Kung University,
Tainan, Taiwan, and the Ph.D. degree in electrical
engineering from National Tsing Hua University,
Hsinchu, Taiwan, in 1983, 1985, and 1993 respectively.
From 1993 to 2001, he was an Associate Professor and
then a Professor in the Department of Electrical
Engineering, Chung Yuan Christian University, Chung
Copyright (c) 2013 IEEE. Personal use is permitted. For any other purposes, permission must be obtained from the IEEE by emailing pubs-permissions@ieee.org.
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication.
Li, Taiwan. From 2001 to 2003, he was Chairperson and a Professor in the
Department of Electrical Engineering, National Dong Hwa University, Hualien,
Taiwan. He was Dean of Research and Development from 2003 to 2005 and
Dean of Academic Affairs from 2006 to 2007 at the same University. Currently,
he is Chair Professor in the Department of Electrical Engineering, National
Central University, Chung Li, Taiwan. He was the Chair, Power Engineering
Division, National Science Council, Taiwan and the Chair, IEEE IE/PELS
Taipei Chapter, 2007 to 2009. He is also now Chair, Task Force on Fuzzy
Systems on Renewable Energy, FS Technical Committee of CIS, IEEE, and
Chair, IEEE CIS Taipei Chapter. His research interests include fuzzy systems,
neural networks and GAs control theories, nonlinear control theories, AC and
ultrasonic motor drives, DSP-based computer control systems, power
electronics, microgrid and smart grids.
Prof. Lin received the Crompton Premium Best Paper Award from the
Institution of Electrical Engineers (IEE), United Kingdom, in 2002; the
Outstanding Research Award from the National Science Council, Taiwan, in
2004 and 2010 respectively; the Outstanding Research Professor Award from
the National Dong Hwa University in 2004; the Outstanding Professor of
Electrical Engineering Award in 2005 from the Chinese Electrical Engineering
Association, Taiwan. Moreover, he was the recipient of the Distinguished
Professor Award and Chair Professor Award from National Central University
in 2008 and 2010 respectively. Furthermore, he is Fellow of the Institution of
Engineering and Technology (IET).
Ying-Chih Hung (Student Member09) was born in
Taipei, Taiwan, in 1984. He received the B.S. degree
in electrical engineering from Chung Yuan Christian
University, Chungli, Taiwan, and M.S. degree in
electrical engineering from National Dong Hwa
University, Hualien, Taiwan in 2006 and 2008
respectively. He is currently working toward the Ph.D.
degree in electrical engineering, National Central
University, Chungli, Taiwan. His research interests
include field-programmable gate array, linear
ultrasonic motor, permanent magnet synchronous motor servo drive system,
motion control, DSP-based control system, light electric vehicle, fault tolerant
control, electric power steering, and intelligence control theories.
Meng-Ting Tsai was born in Pingtung, Taiwan, in
1985. He received the B.S. degree in electrical
engineering from National Ilan University, Yilan,
Taiwan, and M.S. degree in electrical engineering from
the National Central University, Chungli, Taiwan in
2008 and 2012 respectively. His research interests
include DSP-based control system, motor servo drive
system, fault tolerant control, and intelligence control
theories.
Anda mungkin juga menyukai
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Silva Et Al - Ijcim 2012Dokumen14 halamanSilva Et Al - Ijcim 2012RACHEL BOSSBelum ada peringkat
- Vision-Based Defect Detection in Laser Metal Deposition ProcessDokumen10 halamanVision-Based Defect Detection in Laser Metal Deposition ProcessRACHEL BOSSBelum ada peringkat
- 17085954Dokumen9 halaman17085954Johovani SuarezBelum ada peringkat
- Control Reconfiguration of Dynamical Systems: 4y SpringerDokumen7 halamanControl Reconfiguration of Dynamical Systems: 4y SpringerRACHEL BOSSBelum ada peringkat
- Identication of Linear Parameter-Varying Systems Using Nonlinear ProgrammingDokumen27 halamanIdentication of Linear Parameter-Varying Systems Using Nonlinear ProgrammingRACHEL BOSSBelum ada peringkat
- Fig. 1: The Reconfiguration Problem For A Level ControllerDokumen6 halamanFig. 1: The Reconfiguration Problem For A Level ControllerRACHEL BOSSBelum ada peringkat
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- 15 College Sports InventoryDokumen4 halaman15 College Sports InventoryLogaNathanBelum ada peringkat
- Adaptive Control: Enough EnvironmentDokumen14 halamanAdaptive Control: Enough EnvironmentCristian CanazaBelum ada peringkat
- The NAFEMS World CongressDokumen3 halamanThe NAFEMS World Congressalagarg137691Belum ada peringkat
- Review of Thermodynamics and Intro To Statistical Mechanics: Prof. Mark W. Tibbitt - ETH Z Urich - 21 Februar 2019Dokumen9 halamanReview of Thermodynamics and Intro To Statistical Mechanics: Prof. Mark W. Tibbitt - ETH Z Urich - 21 Februar 2019Luis Fernando RodriguezBelum ada peringkat
- Gantt Chart of Scada Project 2020 Pt. Petrosea, TBKDokumen1 halamanGantt Chart of Scada Project 2020 Pt. Petrosea, TBKTyas UtamiBelum ada peringkat
- Share '6. The General Systems Model of The Firm - PPT'Dokumen17 halamanShare '6. The General Systems Model of The Firm - PPT'khannakasBelum ada peringkat
- Impulse Response and Its Properties of Various LTI SystemsDokumen5 halamanImpulse Response and Its Properties of Various LTI SystemsCangkang SainsBelum ada peringkat
- Cruise Control SystemDokumen17 halamanCruise Control SystemNaveed IqbalBelum ada peringkat
- Full Report Control EngineeringDokumen14 halamanFull Report Control EngineeringJoshua ReynoldsBelum ada peringkat
- Control System SyllabusDokumen95 halamanControl System SyllabusSarath GeorgeBelum ada peringkat
- Australian CurriculumDokumen61 halamanAustralian CurriculumJosiel Nasc'mentoBelum ada peringkat
- 1.1.3.11 Lab - Draw A Process DiagramDokumen3 halaman1.1.3.11 Lab - Draw A Process DiagramZeidan Mohammad0% (1)
- Software Development Life CycleDokumen6 halamanSoftware Development Life CycleFabeha QadirBelum ada peringkat
- THEN 2 Tools For EnvironmentDokumen22 halamanTHEN 2 Tools For EnvironmentkarthikultimateBelum ada peringkat
- SAP Testing Roles and ResponsibilitiesDokumen3 halamanSAP Testing Roles and ResponsibilitiesAnonymous 0wXXmp1Belum ada peringkat
- Software Eng..Dokumen116 halamanSoftware Eng..manjeet_dahiya419910% (1)
- Design FIR FilterDokumen22 halamanDesign FIR Filtersaran52_eceBelum ada peringkat
- Previous Years Question Answers (Upscpdf - Com)Dokumen156 halamanPrevious Years Question Answers (Upscpdf - Com)Vivek SugandhBelum ada peringkat
- Using The Min-Max Method To Solve Multiobjective Optimization Problems With Genetic AlgorithmsDokumen2 halamanUsing The Min-Max Method To Solve Multiobjective Optimization Problems With Genetic AlgorithmsNguyen VinhBelum ada peringkat
- Quality Manual (q1) Version - 4.6 May 2011Dokumen22 halamanQuality Manual (q1) Version - 4.6 May 2011miles.lam.icoBelum ada peringkat
- Signals and Systems-I PDFDokumen94 halamanSignals and Systems-I PDFAnusha BaduguBelum ada peringkat
- Control Lab2 PDFDokumen8 halamanControl Lab2 PDFAbdallah DaldoomBelum ada peringkat
- 6CS002 Lecture1 Intro 2010 11 s2Dokumen13 halaman6CS002 Lecture1 Intro 2010 11 s2Sahayaradnarajah NiranjanBelum ada peringkat
- Lecture 2-Classical Optimization TechniquesDokumen18 halamanLecture 2-Classical Optimization TechniquesEngidBelum ada peringkat
- Software Project Management - Quiz 1 SolutionsDokumen8 halamanSoftware Project Management - Quiz 1 SolutionsSmita SrivastavaBelum ada peringkat
- City Out of Chaos PDFDokumen178 halamanCity Out of Chaos PDFgromdrakulaBelum ada peringkat
- A Systems Thinking Framework For Problem Solving and DesignDokumen46 halamanA Systems Thinking Framework For Problem Solving and DesignHabiburrahman AskarBelum ada peringkat
- ANSYS CD 2017 Structures III Topology Optimization PDFDokumen11 halamanANSYS CD 2017 Structures III Topology Optimization PDFMoataz mostafaBelum ada peringkat
- Software TestingDokumen3 halamanSoftware TestingDr. P. N. Renjith Associate Professor - CSEBelum ada peringkat