Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- CertificateDokumen1 halamanCertificateIgor MolnarBelum ada peringkat
- DOD 250 Clone PCBDokumen1 halamanDOD 250 Clone PCBIgor MolnarBelum ada peringkat
- Hans F. K. Gunther 1927 (Racial Elements of European History)Dokumen204 halamanHans F. K. Gunther 1927 (Racial Elements of European History)Groveboy100% (1)
- Datasheet 741Dokumen5 halamanDatasheet 741Lucas Ernesto Caetano ErnestoBelum ada peringkat
- HAKKO 936 - Schematic: Rendered By: Tom Hammond - NØSS 26 MAR 2011 v1.7Dokumen6 halamanHAKKO 936 - Schematic: Rendered By: Tom Hammond - NØSS 26 MAR 2011 v1.7Gak TahuBelum ada peringkat
- ExperimentosDokumen680 halamanExperimentosGerardo Lopez100% (4)
- Renderer Info SkyrimDokumen1 halamanRenderer Info SkyrimIgor MolnarBelum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Future Christchurch: Solutions. Housing: Biran HeDokumen108 halamanFuture Christchurch: Solutions. Housing: Biran HecamiayoungBelum ada peringkat
- Review Chapter 2Dokumen46 halamanReview Chapter 2JennysanBelum ada peringkat
- Slab Culvert Irc 21 Irc 112Dokumen5 halamanSlab Culvert Irc 21 Irc 112Rupendra palBelum ada peringkat
- NewspaperDokumen1 halamanNewspaperMustafa Nabeel ZamanBelum ada peringkat
- UA5000 V100R019C06 Hardware Description 05 PDFDokumen563 halamanUA5000 V100R019C06 Hardware Description 05 PDFdabouzia slahBelum ada peringkat
- Education During The Ancient Period Primitive EducationDokumen5 halamanEducation During The Ancient Period Primitive EducationEn CyBelum ada peringkat
- All Excell FunctionsDokumen3 halamanAll Excell Functionsrajesh_jeyachandranBelum ada peringkat
- P2P L2 Asr9000Dokumen88 halamanP2P L2 Asr9000ws_595Belum ada peringkat
- Pakistan Wapda - Power Wing: Standard Operating ProceduresDokumen8 halamanPakistan Wapda - Power Wing: Standard Operating Procedureszahra batoolBelum ada peringkat
- Lesson4 1515Dokumen14 halamanLesson4 1515gm hashBelum ada peringkat
- Tutorial 4 Chapter 4 - CorrosionDokumen2 halamanTutorial 4 Chapter 4 - CorrosionHafizatul AqmarBelum ada peringkat
- Lesson PlanDokumen11 halamanLesson PlanKim Gabrielle Del PuertoBelum ada peringkat
- Probability and Statistics Ii Assignment I July 2019 PDFDokumen3 halamanProbability and Statistics Ii Assignment I July 2019 PDFDanielBelum ada peringkat
- Program Documentation Lesson 10Dokumen32 halamanProgram Documentation Lesson 10Armechelyn DerechoBelum ada peringkat
- Fashion Design and Product DevelopmentDokumen6 halamanFashion Design and Product DevelopmentYona Tasya AzizieBelum ada peringkat
- Bianca Premo - The Enlightenment On Trial - Ordinary Litigants and Colonialism in The Spanish Empire-Oxford University Press (2017)Dokumen385 halamanBianca Premo - The Enlightenment On Trial - Ordinary Litigants and Colonialism in The Spanish Empire-Oxford University Press (2017)David Quintero100% (2)
- Uniden Bearcat Scanner BC365CRS Owners ManualDokumen32 halamanUniden Bearcat Scanner BC365CRS Owners ManualBenjamin DoverBelum ada peringkat
- GNDU Contract Jobs 2013 Advertisement PDFDokumen8 halamanGNDU Contract Jobs 2013 Advertisement PDFAnonymous zwCV8ZBelum ada peringkat
- Multimedia Critique Paper 1Dokumen4 halamanMultimedia Critique Paper 1api-345838334Belum ada peringkat
- Virtual Screening of Natural Products DatabaseDokumen71 halamanVirtual Screening of Natural Products DatabaseBarbara Arevalo Ramos100% (1)
- AYLS Annual Report 2019 LampDokumen136 halamanAYLS Annual Report 2019 LampHigh FourBelum ada peringkat
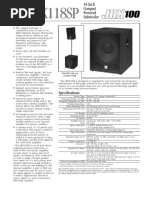
- JRX118SP SpecsheetDokumen2 halamanJRX118SP SpecsheetLuisBelum ada peringkat
- PT2 Exam CLASS XI CS 2023Dokumen2 halamanPT2 Exam CLASS XI CS 2023Aditya AurangeBelum ada peringkat
- Survey 2 Module 2Dokumen76 halamanSurvey 2 Module 2veereshBelum ada peringkat
- Option MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)Dokumen4 halamanOption MCQ-Human Resource Management (205) : Clarifying Handling People Maintaing Relationship (C) Both (A) and (B)MukulBelum ada peringkat
- Viaje Del SolDokumen3 halamanViaje Del SolJanella UmiehBelum ada peringkat
- Product Management PRELIM EXAMDokumen24 halamanProduct Management PRELIM EXAMAlyssa marieBelum ada peringkat
- C79 Service Kits and Parts List: CAP179 - C79 Aug 2017 - Rev ADokumen32 halamanC79 Service Kits and Parts List: CAP179 - C79 Aug 2017 - Rev Arobert100% (2)
- Basic - Concepts - in - Pharmaceutical - Care CLINICAL PHARMACYDokumen17 halamanBasic - Concepts - in - Pharmaceutical - Care CLINICAL PHARMACYPrincess RonsableBelum ada peringkat