Anda mungkin juga menyukai
- Hal VersionDokumen1 halamanHal VersionboboboBelum ada peringkat
- R IntrooooooooooooooooooooooooooooDokumen106 halamanR IntrooooooooooooooooooooooooooooPedro Guerrero PérezBelum ada peringkat
- Box2D v2.3.0 User ManualDokumen69 halamanBox2D v2.3.0 User ManualTonyR123Belum ada peringkat
- SHHH! - Society For HandHeld HushingDokumen3 halamanSHHH! - Society For HandHeld Hushing*Zer0Nin3r*Belum ada peringkat
- Keylight 1.2 AEDokumen70 halamanKeylight 1.2 AEthomasriatoBelum ada peringkat
- A Pit 1Dokumen15 halamanA Pit 1Abdelouahid DerhabBelum ada peringkat
- Uruguay: Outlook StableDokumen3 halamanUruguay: Outlook StableRicardo HerreraBelum ada peringkat
- Flip4Mac WMV User GuideDokumen30 halamanFlip4Mac WMV User Guidemissbliss84Belum ada peringkat
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (587)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (73)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (265)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (119)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- Staircase Preliminary Design Based On NBC and IS CodeDokumen10 halamanStaircase Preliminary Design Based On NBC and IS CodeEducation. HubBelum ada peringkat
- NTP35N15 Power MOSFET Features and SpecificationsDokumen7 halamanNTP35N15 Power MOSFET Features and SpecificationsChristine GomezBelum ada peringkat
- As 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithDokumen7 halamanAs 4123.4-2008 Mobile Waste Containers Containers With Four Wheels With A Capacity From 750 L To 1700 L WithSAI Global - APACBelum ada peringkat
- Fajs FSXDokumen8 halamanFajs FSXJunhy Bandeira CassandraBelum ada peringkat
- Valvula Selectora Trans.Dokumen4 halamanValvula Selectora Trans.enriqueBelum ada peringkat
- Ea80 Series PDFDokumen82 halamanEa80 Series PDFAnca MunteanuBelum ada peringkat
- Devoir 2 Arsalan 2SM BIOFDokumen3 halamanDevoir 2 Arsalan 2SM BIOFphytanjaBelum ada peringkat
- HalideDokumen195 halamanHalidejadecolourBelum ada peringkat
- Acsomega 9b01541Dokumen9 halamanAcsomega 9b01541Benedictus EduardoBelum ada peringkat
- How to Operate AAS with SignPal & PhotoPRINTDokumen25 halamanHow to Operate AAS with SignPal & PhotoPRINTLucian DogariuBelum ada peringkat
- Exploratory Boring Spacing & DepthDokumen24 halamanExploratory Boring Spacing & Depth18106 Mahmudur RahmanBelum ada peringkat
- Reinforced ConcreteDokumen13 halamanReinforced ConcreteRenukadevi Rpt17% (18)
- Sodium Citrate AUDokumen3 halamanSodium Citrate AUKrishna OgotBelum ada peringkat
- GOT2000 - UserManual Monitor - SH 081196 I PDFDokumen614 halamanGOT2000 - UserManual Monitor - SH 081196 I PDFFanny Achmad Hindrarta KusumaBelum ada peringkat
- Siemens-Relee de Timp PDFDokumen2 halamanSiemens-Relee de Timp PDFChioibasNicolaeBelum ada peringkat
- Fem Question PaperDokumen4 halamanFem Question PaperARSBelum ada peringkat
- Partlist Smsport 110RDokumen74 halamanPartlist Smsport 110RThai YunBelum ada peringkat
- RCC BEAM DESIGN AND SERVICEABILITYDokumen15 halamanRCC BEAM DESIGN AND SERVICEABILITYprashmceBelum ada peringkat
- PDVSA Engineering Design Manual Volume 9–I Process AnalyzersDokumen25 halamanPDVSA Engineering Design Manual Volume 9–I Process AnalyzersAlberto Enrique De Santa Anna CampderáBelum ada peringkat
- CUCM Intracluster Port Usage GuideDokumen3 halamanCUCM Intracluster Port Usage GuideAbhinayMylavarapuBelum ada peringkat
- J 1 B 1211 CCDDokumen3 halamanJ 1 B 1211 CCDRegion 51Belum ada peringkat
- Directional OCDokumen301 halamanDirectional OCurcalmBelum ada peringkat
- Murray Loop Test To Locate Ground Fault PDFDokumen2 halamanMurray Loop Test To Locate Ground Fault PDFmohdBelum ada peringkat
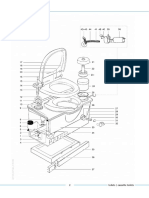
- Cassette toilet spare parts guide for models C2, C3 and C4Dokumen21 halamanCassette toilet spare parts guide for models C2, C3 and C4georgedragosBelum ada peringkat
- SDCK CD Ies 01 (Rev B)Dokumen125 halamanSDCK CD Ies 01 (Rev B)Narada HerathBelum ada peringkat
- Demographically Similar EntriesDokumen1 halamanDemographically Similar EntriesTahsildar MydukurBelum ada peringkat
- FG - BDER-78 Technical Catalogue - Technical - UNDokumen8 halamanFG - BDER-78 Technical Catalogue - Technical - UNAnh Le NgocBelum ada peringkat
- Parts List 09 636 02 02: AC Brake Motors BMG05-BMG1 Additional List: BrakeDokumen2 halamanParts List 09 636 02 02: AC Brake Motors BMG05-BMG1 Additional List: Brakeali morisyBelum ada peringkat
- Specification for biodiesel (B100) - ASTM D6751-08Dokumen1 halamanSpecification for biodiesel (B100) - ASTM D6751-08Alejandra RojasBelum ada peringkat
- Motion ReportDokumen2 halamanMotion Reportmikeb-erau100% (2)