Anda mungkin juga menyukai
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeDari EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifePenilaian: 4 dari 5 bintang4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreDari EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You ArePenilaian: 4 dari 5 bintang4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItDari EverandNever Split the Difference: Negotiating As If Your Life Depended On ItPenilaian: 4.5 dari 5 bintang4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceDari EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RacePenilaian: 4 dari 5 bintang4/5 (895)
- Grit: The Power of Passion and PerseveranceDari EverandGrit: The Power of Passion and PerseverancePenilaian: 4 dari 5 bintang4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeDari EverandShoe Dog: A Memoir by the Creator of NikePenilaian: 4.5 dari 5 bintang4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersDari EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersPenilaian: 4.5 dari 5 bintang4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureDari EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FuturePenilaian: 4.5 dari 5 bintang4.5/5 (474)
- Her Body and Other Parties: StoriesDari EverandHer Body and Other Parties: StoriesPenilaian: 4 dari 5 bintang4/5 (821)
- The Emperor of All Maladies: A Biography of CancerDari EverandThe Emperor of All Maladies: A Biography of CancerPenilaian: 4.5 dari 5 bintang4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)Dari EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Penilaian: 4.5 dari 5 bintang4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingDari EverandThe Little Book of Hygge: Danish Secrets to Happy LivingPenilaian: 3.5 dari 5 bintang3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyDari EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyPenilaian: 3.5 dari 5 bintang3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)Dari EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Penilaian: 4 dari 5 bintang4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaDari EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaPenilaian: 4.5 dari 5 bintang4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryDari EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryPenilaian: 3.5 dari 5 bintang3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnDari EverandTeam of Rivals: The Political Genius of Abraham LincolnPenilaian: 4.5 dari 5 bintang4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealDari EverandOn Fire: The (Burning) Case for a Green New DealPenilaian: 4 dari 5 bintang4/5 (74)
- The Unwinding: An Inner History of the New AmericaDari EverandThe Unwinding: An Inner History of the New AmericaPenilaian: 4 dari 5 bintang4/5 (45)
- Rise of ISIS: A Threat We Can't IgnoreDari EverandRise of ISIS: A Threat We Can't IgnorePenilaian: 3.5 dari 5 bintang3.5/5 (137)
- Iq7 ManualDokumen1 halamanIq7 ManualHoàng Ngọc-TuấnBelum ada peringkat
- Electronic Circuits - 1 Unit - 3 Small Signal Analysis of JFET and MOSFET Amplifiers Biasing of Fet Amplifiers Fixed BiasDokumen17 halamanElectronic Circuits - 1 Unit - 3 Small Signal Analysis of JFET and MOSFET Amplifiers Biasing of Fet Amplifiers Fixed BiasMutharasu SBelum ada peringkat
- Ec8452 Ec-Ii Unit-1Dokumen122 halamanEc8452 Ec-Ii Unit-1Ananda Sailesh KBelum ada peringkat
- Eca Lab Manual PDFDokumen56 halamanEca Lab Manual PDFrppvch100% (5)
- CA3080Dokumen12 halamanCA3080yusufwpBelum ada peringkat
- Service Manual: Micro-Tech - 1200Dokumen43 halamanService Manual: Micro-Tech - 1200abel sanchezBelum ada peringkat
- TL1451ADokumen32 halamanTL1451Ajose4445Belum ada peringkat
- Jurnal Bipolar Junction TransistorDokumen4 halamanJurnal Bipolar Junction TransistorAndhika Kumara DjaffriBelum ada peringkat
- Experiment No: 4: TITLE: 4-Bit Comparator AIM: To Design 4-Bit Comparator Using IC 7485 Prior ConceptDokumen43 halamanExperiment No: 4: TITLE: 4-Bit Comparator AIM: To Design 4-Bit Comparator Using IC 7485 Prior ConceptKelvin CooperBelum ada peringkat
- Chapter 09Dokumen87 halamanChapter 09anujBelum ada peringkat
- ECE 2203L Mid-Term CO3 AssessmentDokumen3 halamanECE 2203L Mid-Term CO3 AssessmentJayk RyanBelum ada peringkat
- GS9024Dokumen16 halamanGS9024Osama YaseenBelum ada peringkat
- Lab 8 Power Amplifier BBN 10205 (Done)Dokumen5 halamanLab 8 Power Amplifier BBN 10205 (Done)Zhamir ZhakwanBelum ada peringkat
- German Airborne Radar DefDokumen32 halamanGerman Airborne Radar Defadrcostache6515100% (1)
- Vibration of AircraftDokumen18 halamanVibration of AircraftArun NairBelum ada peringkat
- EC312 PS13 Gain Filters NoiseDokumen3 halamanEC312 PS13 Gain Filters NoiseJanica Rheanne JapsayBelum ada peringkat
- An Ultimate Guide To Light Sensor Circuit LDR CircuitDokumen6 halamanAn Ultimate Guide To Light Sensor Circuit LDR CircuitjackBelum ada peringkat
- Am Radio Kit: Elenco Electronics, IncDokumen12 halamanAm Radio Kit: Elenco Electronics, Incjg94419625Belum ada peringkat
- 2 SK 3476Dokumen5 halaman2 SK 3476Bravo KiloBelum ada peringkat
- ComantDokumen134 halamanComantsoniaxBelum ada peringkat
- OptiSystem Tutorials Volume 2Dokumen476 halamanOptiSystem Tutorials Volume 2Lamija Nukic100% (3)
- CN0510Dokumen6 halamanCN0510Jordi DuranVallsBelum ada peringkat
- Filkchannel MK2 ManualDokumen17 halamanFilkchannel MK2 ManualFA RakotoniainaBelum ada peringkat
- Amplificador de Poder Hafler p1500 p3000 ManDokumen28 halamanAmplificador de Poder Hafler p1500 p3000 ManAlan GarciaBelum ada peringkat
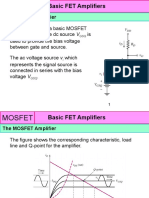
- The MOSFET AmplifierDokumen135 halamanThe MOSFET AmplifierRodrigo WilliamsBelum ada peringkat
- LabVIEW MathScriptDokumen109 halamanLabVIEW MathScriptMichael ManriquezBelum ada peringkat
- Service Manual: DR17 Compact Disc RecorderDokumen46 halamanService Manual: DR17 Compact Disc Recorder1alllan1100% (1)
- Feedback Amplifier, Its Operation, Effect Importance and Connecting Types: A ReviewDokumen18 halamanFeedback Amplifier, Its Operation, Effect Importance and Connecting Types: A ReviewJasmineBelum ada peringkat
- Project Report For Electronic DiceDokumen4 halamanProject Report For Electronic Dicemohsankayani3462Belum ada peringkat